OFDM系统中帧同步算法改进研究∗
2020-10-30
(中国船船重工集团公司第七二二研究所 武汉 430200)
1 引言
无线局域网(WLAN)是一种无线通信系统[1~2],其本质上是一种网络互联技术[3],它具有低成本、高速率、灵活方便等优势,是人们生活中不可或缺的一部分。OFDM技术是WLAN的核心技术之一[4],虽然具有诸多优点[5],但仍然离不开精确的同步。帧同步是对数据分组起始位置的检测,是接收机工作的第一步,其算法的好坏直接影响着接收机的后续工作。
文献[6]中介绍了一种基本的帧同步算法,利用数据分组前重复的训练序列[6~7],采用延迟相关加长度保持的方法,该算法容易受到直流噪声的影响。文献[8~9]通过构造训练序列对同步算法进行了改进,文献[10~11]提出了基于循环前缀的ML(最大似然估计)同步算法,这几种算法仍会受到直流噪声的影响。而直流估计和消除算法存在一定的误差,也会引起误判[12~13]。针对此问题,本文在文献[6]介绍的基本帧同步算法的基础上,提出了一种改进算法。
2 帧同步算法的原理[6]
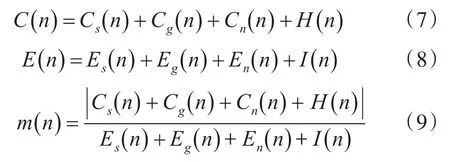
基本算法通过接收序列与其延迟D个时刻的相关值与能量值的比值来判断训练序列是否到来。接收序列r(n)为

其中s(n)为训练序列,周期为D,g(n)为直流噪声,n(n)为高斯噪声。


延迟相关值C(n)为

数据D长度的能量E(n)为

则帧同步算法的判决变量m(n)为

用Cs(n)、Cg(n)和Cn(n)分别表示训练序列、直流噪声和高斯噪声的延迟相关值,Es(n)、Eg(n)和En(n)表示其D长度的能量值,用H(n)和I(n)分别表示延迟相关和能量计算式中三者两两之间互相关值之和,将式(1)代入式(4)~(6)展开并化简得:
直流噪声的值在其持续的整个时间段内保持不变,其能量值和延迟相关值相等,即:

当接收到第二个训练序列后,s(n-k)=s(n-k-D),Cs(n)则和Es(n)的值相等,且:

Cn(n)、H(n)和I(n)均接近于0。若接收序列中不存在直流噪声,当训练序列未到来时,C(n)=Cn(n)≈0,m(n)接近0;接收完第二个训练序列后,将式(11)代入式(9)得:

当信噪比较大时,m(n)接近1,并持续一段时间。图1给出了训练序列延迟相关值的变化情况。基本算法中未考虑直流噪声的影响,根据m(n)的特点,设定合理的检测门限Tn,当m(n)超过门限值并连续保持一段时间,则认为新的数据分组到来。

图1 帧同步算法的接收序列格式
若接收序列中存在直流噪声,接收完第二个训练序列后,将式(10)~(11)代入式(9):

当信噪比较大时,m(n)的值接近1;训练序列未到来时:

若直流噪声与高斯噪声能量之比较大,m(n)的值接近1,运用基本同步算法就会将直流噪声误判为训练序列,降低同步成功的概率。
3 帧同步算法的改进
为了减小直流噪声对帧同步算法的干扰,提高同步成功的概率,将接收序列半个周期长度的延迟相关和能量的比值m2(n)作为新增判决变量。接收序列延迟D/2个时刻的相关值为

数据D/2长度的能量值为

则帧同步算法的新增判决变量m2(n)为

其中D为训练序列的周期长度。用C2s(n)、C2g(n)和C2n(n)分别表示训练序列、直流噪声和高斯噪声当前值与其延迟D/2个时刻的相关值,用E2s(n)、E2g和En2分别表示其D/2长度的平均能量值,对照式(7)~(8),H2(n)和I2(n)分别表示半周期长度内相应互相关值之和,则:
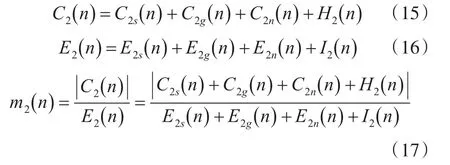
C2s(n)为0,C2n(n)、H2(n)和I2(n)均接近于0。对照前文:
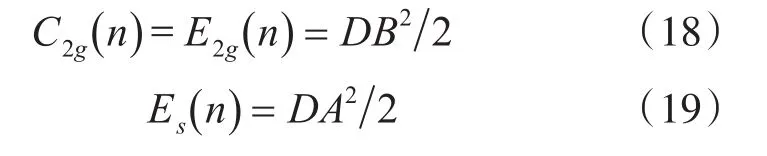
将式(18)~(19)代入式(17)中,可得:

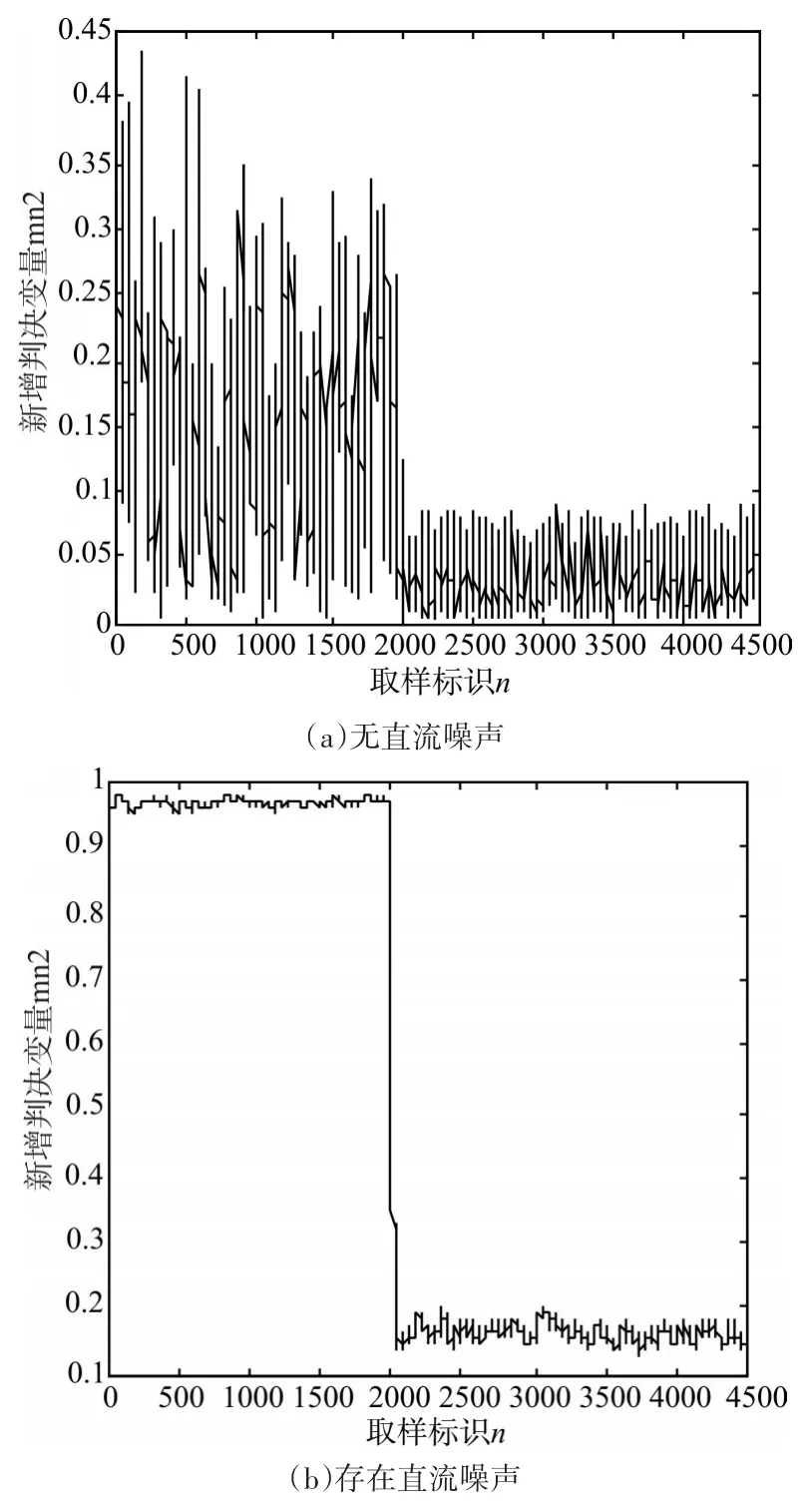
图2 新增判决变量
图2(b)为接收序列中存在直流噪声时m2(n)的变化情况(训练序列与直流噪声能量之比不低于2dB)。根据式(20),当收到第二个训练序列时,将式(18)~(19)代入式(20)得:

其结果会比无直流噪声时略高;而训练序列没有到来时,将式(18)代入式(20)得:
当信噪比较大时,高斯噪声的能量值较小,若直流噪声与高斯噪声能量之比较大时,m2(n)的值会接近于1。
根据m2(n)的特点,在传统算法的基础上将m2(n)作为新增判决变量,设定合理的检测门限Tn2(0.4),当m(n)的值大于Tn且m2(n)的值小于Tn2时,才可以判定训练序列到来,这样可以很大程度上避免直流噪声造成的误判,提高帧同步成功的概率。
4 仿真结果分析
当同步到的信号起始点在信号起始点的前后某个范围时,记为同步成功。高斯信道中,分别运用两种算法时帧同步成功的概率随信噪比(-10dB~10dB)变化的曲线如图3所示。
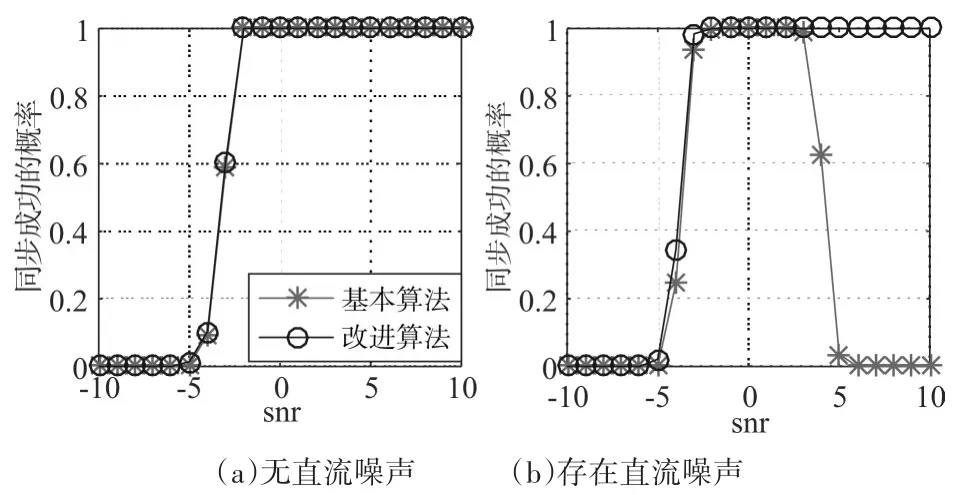
图3 两种算法下同步成功的概率曲线
图3(a)为不存在直流噪声时的曲线,图3(b)为存在直流噪声(训练序列与直流噪声能量之比不低于2dB)时的曲线。当信噪比较低时,不论信道中有无直流噪声,使用改进算法同步成功的概率仅仅是略高于传统算法;在高信噪比下,当信道中不存在直流噪声时,两种算法的差别不大,当信道中存在直流噪声时,改进算法同步成功的概率远高于基本算法。
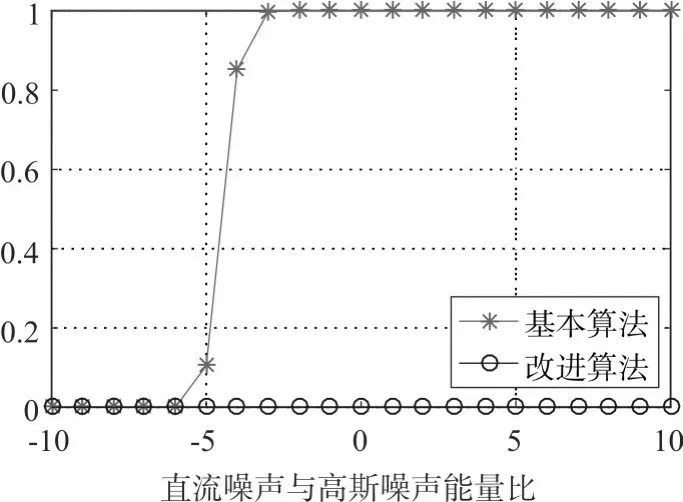
图4 错误同步的概率曲线
图4为接收到的序列只存在恒定直流噪声和高斯噪声时,将直流噪声误判为训练序列的概率随着直流噪声和高斯噪声能量之比的变化曲线,观察发现,传统的帧同步算法会将直流噪声误判成训练序列,而改进后的算法则不会出现这种情况。
5 结语
改进后的帧同步算法可以抵制较小直流噪声的干扰,和传统算法相比,改进算法在低信噪比下具有更好的性能,在高信噪比时可以完全抑制直流噪声对帧同步结果的影响,能有效提高同步成功的概率,而且操作简单,在应用中具有较高的可实现性。结合直流检测和消除算法,其应用范围更广。