基于通用设备的隧道围岩与结构实用扫描系统及应用
2020-10-29郭建波
郭建波
(中铁二十二局集团轨道工程有限公司 北京 100040)
1 引言
梨花顶隧道位于北京市东北部,贯穿北京市密云区大城子镇和河北承德市六道河镇,全隧处于山区。隧道进口里程为 D1K85+116,出口里程为D1K97+359,全长12 243 m,为单洞双线隧道。隧道内线间距5.0 m,隧道最大埋深为542.77 m。在施工过程中,由于岩体节理裂隙和爆破扰动的影响,隧道实际开挖轮廓凹凸起伏,支护结构也与设计有明显差异。因此,及时、准确和全面掌握围岩和支护结构情况对施工质量安全管理至关重要[1-2]。
通常情况下,隧道开挖轮廓主要通过人工尺量或断面仪扫描的方法进行检测,不仅检测速度慢,还要经常面临掉块、坍塌的危险,因而难以频繁开展。为了快速全面获取目标体的几何和影像信息,在信息技术领域开展了长期大量的研究,美国学者Marc Levoy在1994年采用扫描仪与彩色照片相结合的建模技术[3],初步实现了目标体的几何信息采集和三维建模[4-5]。近年来随着三维扫描技术的不断发展,扫描精度以及对目标体的还原程度不断提高,扫描仪器的灵活度也逐步提高[6-11],相关技术也逐步在隧道工程领域得以尝试。例如,仇文革等人[12]从前期采用立体坐标量测仪,逐点测量并求解了各点物方坐标,绘制了隧道的开挖轮廓立体图,到近年来逐步采用三维数字图像扫描技术分析并提取隧道工程的地质条件[13]。许磊等人[14]通过对整座隧道的分站式地面激光扫描,获取了隧道整体激光点云,实现了超挖及欠挖部位的自动化检测。这些方法的共同之处在于,通过车载设备或地面架设设备的方法对开挖轮廓或支护结构进行扫描,由于设备到目标体的距离较远,而隧道内空气及环境又比较恶劣,因此对仪器设备的性能要求很高,这大大限制了这类设备的推广应用。针对隧道围岩与结构精细化扫描存在的上述难题,本文作者研制了一种围岩与结构实用扫描系统,通过将扫描设备贴近围岩或支护结构表面,从而降低对扫描设备的性能要求,进而降低设备成本。
2 实用扫描系统总体方案
实用扫描系统通过沿隧道纵向和环向移动扫描设备,实现对围岩和结构表面的全面覆盖。如图1所示,在隧道初期支护顶部或两侧安装纵向滑轨,在纵向滑轨上安装环向滑轨,在环向滑轨上搭载扫描设备(包括摄像、测距和测温等设备)。纵向滑轨采用工字钢轨道,伺服电机驱动;环向轨道采用硬质铝合金骨架,骨架上安装高强自润滑塑钢齿圈,通过步进电机驱动,如图2所示。
通过环向滑轨及其搭载的扫描设备在纵向滑轨上沿隧道纵向移动,以及扫描设备在环向滑轨上环向移动,实现对隧道围岩和结构表面的全面扫描,收集隧道结构缺陷、隧道超欠挖程度及隧道内温度等信息,并由隧道内部通讯系统与隧道外部通讯系统连接,实现在隧道外部对隧道施工现场信息的收集、整理与分析。

图2 实用扫描系统
3 主要扫描设备
为了适应下一步智能建造的需要,系统主要搭载AR智能眼镜、激光测距和温湿度监测设备。
(1)AR智能眼镜
AR智能眼镜是一部集处理器模组、显示模组、供电模组、摄像模组、控制模块、传感器模块、通信模块于一体的,拥有独立操作系统的智能可穿戴设备。本系统采用炬视科技的C300工业级智能眼镜(见图3),经技术开发,可满足双轨扫描系统中扫描组件的技术要求。

图3 炬视C300工业级智能眼镜组成部件
(2)其它辅助设备
为满足隧道测距、测温及病害识别的需要,系统还搭载以下设备:
①红外测温、测距组件:将DS18B20数字温度传感器等技术与传统红外测温、测距技术相结合,对AR智能眼镜进行二次开发,扫描组件中融入PLC控制与相应通讯技术,确保定位后的精准测距。
2.2 设备相关性因素(device related) 设备相关性因素包括:气管插管、呼吸机管路及鼻饲管等。插管12 h后,细菌在气管插管内壁形成一种生物膜,生理盐水滴注到气管插管、吸痰、咳嗽、体位改变或重新气管插管等造成生物膜脱落,同时口咽部分泌物积存于声门与气囊上腔隙内,引起细菌生长繁殖。当气囊压力不足时,分泌物滑过气囊落入肺部,是VAP难治和反复发生的原因之一[11]。ICU危重患者因长期卧床及留置鼻胃管,胃食管括约肌松弛易致反流,胃反射抑制排空延迟、胃肠张力降低易发生误吸,研究表明,再次插管及误吸使VAP发生增加6倍。此外,呼吸机管路也是细菌定植的重要场所[12-13]。
②病害识别组件:该组件功能由工业级AR智能眼镜结合PLC控制技术进行海量图片信息采集,通过深度学习等人工智能技术的应用实现。
4 通讯方案及扫描系统远程控制技术
4.1 通讯解决方案
隧道洞内外通讯系统架构如图4所示。
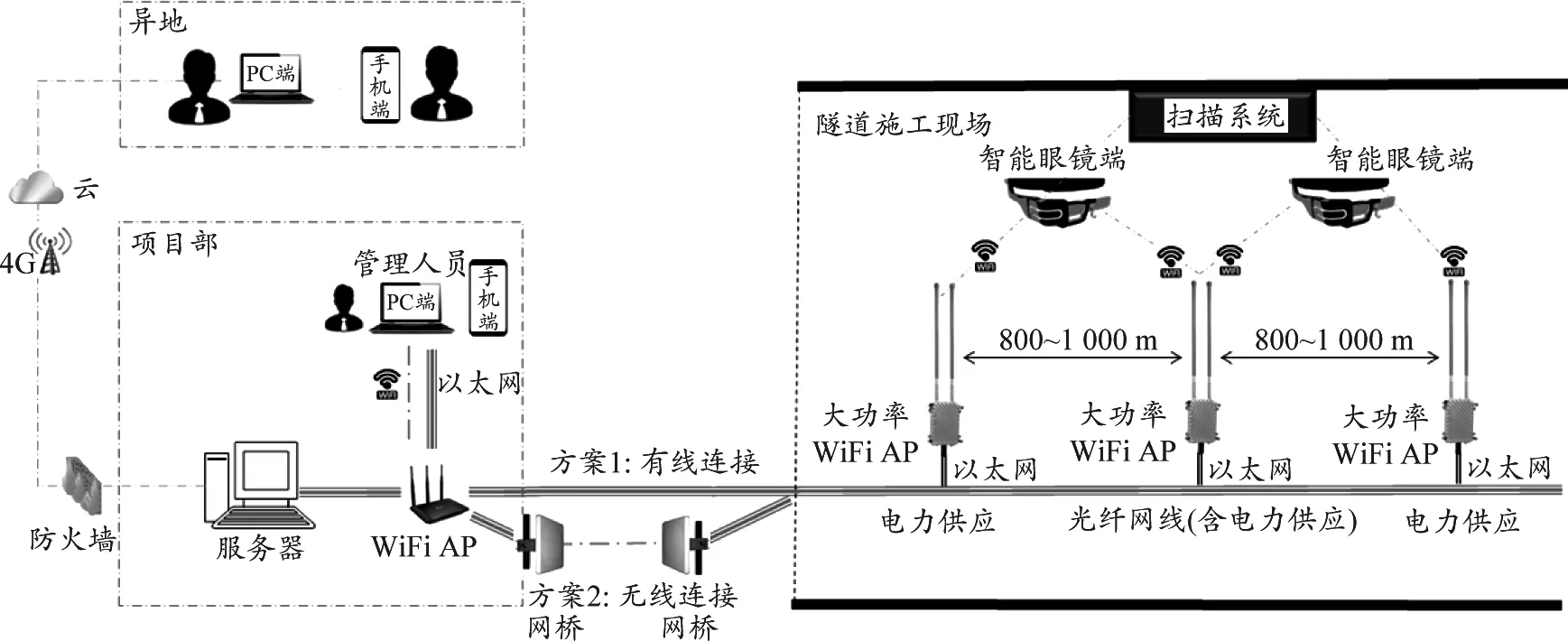
图4 通讯系统架构
4.1.1 隧道内信息传输方案
采用架设室外无线WiFi AP的方式,进行现场的信息传输。现场测试采用华为AP8130DN大功率WiFi AP,接入AP端,可实现施工现场300 m左右范围内无线信号的全面覆盖。扫描系统通过无线的方式与AP端连接,并在隧道施工现场不同位置根据信号强弱切换不同AP端,保障信号传输顺畅,实现扫描系统处于隧道现场任何位置均可与服务器之间保持稳定、高质量的无线信号传输。
4.1.2 隧道外信号传输方案
由隧道口到隧道外接收端的信号传输有基于内网的有线传输、无线传输两种近距离方案,与一种基于外网的远距离无线信息传输方案。
(1)内网有线传输方案
(2)内网无线传输方案
该方案主要通过网桥与网桥之间的信息传递,实现基于内网的无线信息传输。于隧道洞口处以及隧道外部服务器端WiFi AP处各架设一个网桥,实现信号的接收,进而传输隧道内部数据。连接方式如图5所示。
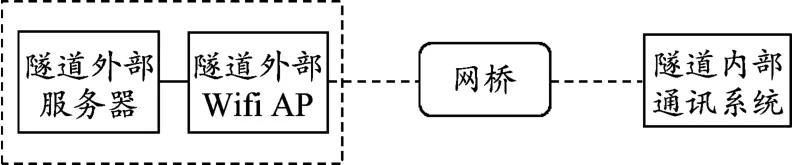
图5 内网无线传输方案示意
(3)外网无线远距离传输方案
借助外网实现数据的远距离实时传输。施工现场人员佩戴智能眼镜并与携带的个人热点自动连接,实现智能眼镜端数据的接入与输出。远距离PC端人员登录PC版系统,现场人员登录相应APP,实现基于外网(4G信号或互联网)及云端的信息传输。
4.2 扫描系统远程控制技术
(1)智能眼镜端扫描方式
采用15 W步进电机,转速约600 rpm,使用10 mm丝杆与轨道系统连接,设定沿环向轨道每秒移动25 cm的距离并对围岩结构进行测距及拍照工作。
(2)后台系统工作方式
通过使用由炬视科技研发的与其智能眼镜系统协同工作的远程可视化系统,将智能眼镜摄像头扫描获取的信息编码压缩后,通过网络传输至后端服务器,用户使用浏览器或者客户端访问服务器可实现在PC端或移动智能设备端获取现场实时数据功能。
5 实用扫描系统技术指标与功能
(1)系统优点
通过设置纵向滑轨和环向滑轨,使扫描系统能够实现纵向和环向移动,全面覆盖隧道围岩和结构表面。简单的轨道系统为扫描系统提供了快捷、稳定和低成本的定位平台;由于扫描系统距离被扫描的围岩和结构表面很近,对扫描系统的分辨率和精度的要求都很低,可以大大降低全息扫描的仪器设备成本。
(2)技术指标
实用扫描系统为快速掌握围岩和结构的状态提供了快捷、稳定和低成本的定位平台。其主要技术指标如表1所示。

表1 系统功能及技术指标
利用本实用扫描系统,并经过相应的适应性改进,可以实现以下功能:①全面收集隧道施工阶段围岩地质条件信息;②高效且精准获取隧道开挖轮廓;③精细地支护结构质量检查;④有针对性地支护结构病害检查;⑤及时地结构质量监控。
由于扫描系统距离被扫描的围岩和结构表面很近,对扫描系统的分辨率和精度要求都很低,可以大大降低全息扫描的仪器设备成本。
6 结论
通过设计一套双轨扫描机构,采用通用监测设备,研制了隧道围岩与结构实用扫描系统,可实现隧道围岩和支护结构的快速、全面和低成本扫描。
(1)实用扫描系统通过沿隧道纵向和环向移动扫描设备,实现对围岩和支护结构的全面覆盖。
(2)系统搭载AR智能眼镜和测距、测温等监测检测设备,并采用多种通讯模式,实现监控扫描的远程自动化控制。
(3)系统定位精度±1 mm,影像分辨率达到1 280 P,测距精度±1 cm,测温精度±0.5℃,满足施工管理和质量安全控制要求,成本低、使用方便。
(4)结合增强现实技术的特性,说明其在隧道工程中运用的可行性。通过其主系统与辅助系统的开发,实现对隧道超欠挖的信息采集,肯定了增强现实技术应用于隧道施工过程中的实际意义。