基于滑模变结构光伏并网逆变器控制研究
2020-10-28
(皖江工学院,安徽 马鞍山 243032)
太阳能作为清洁绿色新能源,其开发和利用已然成为解决一次能源带来的环境问题和能源危机的重要措施之一[1-2]。并网发电系统是太阳能利用研究的一个重要方向,主要控制任务是控制DC/AC逆变器输出电压与电网电压的频率、相位、幅值一致,同时输出的并网电流为谐波含量少、畸变率小、稳定的正弦波,并且其频率、相位与电网电压一致即功率因数为1[3-4]。并网逆变器作为并网发电的关键设备,它的控制对提高并网的发电效率、降低成本具有积极意义[5]。目前在实际应用中并网逆变器的控制方法有很多,常规的控制策略(如滞环电流控制、单环PI 控制、双环PI 控制、重复控制、无差拍控制等策略)需要有精确的模型,电路参数也随时间发生变化,具有非线性,控制精度也不高,并且需要跟踪正弦电流,所以控制效果往往不尽人意[6-8]。为克服电路参数的时变问题,本文采用响应快、鲁棒性好、不需要在线辨识、物理实现简单等优点的滑模变结构控制(sliding mode control,SMC)方法对并网逆变器进行控制。
1 基本工作原理
本文以单相光伏并网系统为控制对象,后级DC/AC 逆变电路一般采用全桥电路,如图1 所示[9]。
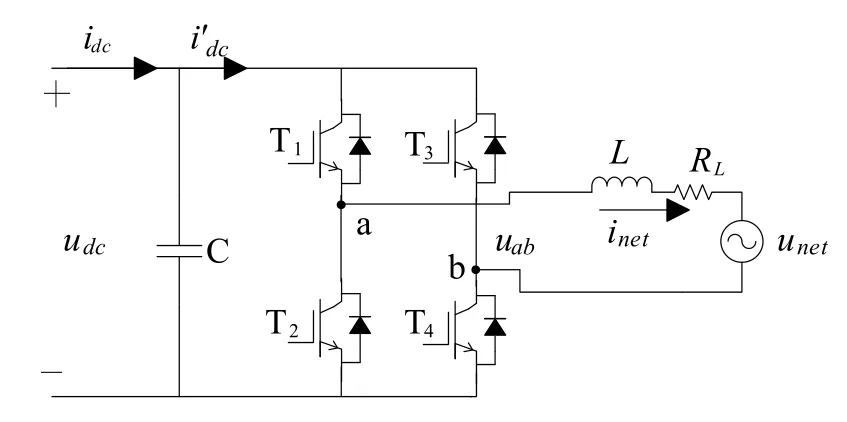
图1 全桥逆变电路拓扑
图中udc为通过Boost 电路升压后的稳定电压;uab为SPWM 方式控制下的输出交流脉冲波电压;unet为电网电压;inet为逆变器输出并网电流;RL为线路的等效电阻,一般很小;L为滤波电感,主要用于滤除逆变器输出的高次谐波。根据基尔霍夫电压定律及欧姆定律可得:

图2 为并网逆变器滑模控制系统框图,在并网逆变器控制的全过程中关键就在于对电流的控制,因为并网控制需要并网电流inet要时刻快速地跟踪上参考电流的变化。其控制过程是首先通过电压环产生并网电流的参考值;然后,将参考值与实际检测的电流inet进行比较得到偏差e,随后对偏差e进行 SMC 处理后与三角载波进行比较得到SPWM 信号;最后,通过功率驱动模块控制主电路产生与电网同频、同相的电流并入电网。
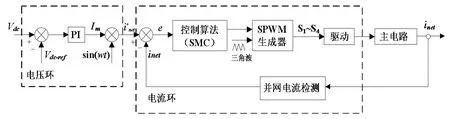
图2 并网逆变器滑模控制系统框图
定义开关函数Sk,当T1、T3导通,T2、T4关断Sk=1;当T1、T3关断,T2、T4导通Sk=0,(k=1 或2)。在理想的情况下,Sk与桥臂间电压的关系如表1 所示;与DC-link 输入电流的关系如表2 所示。
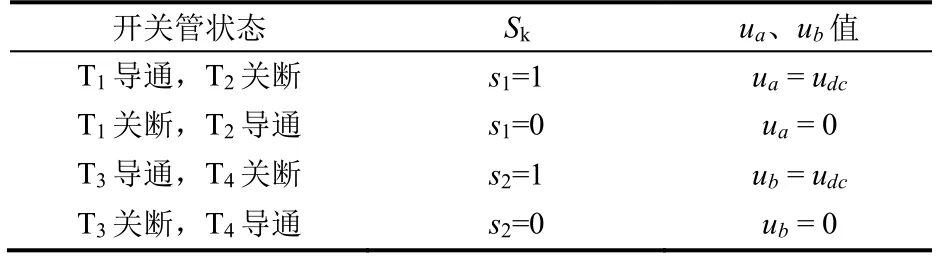
表1 Sk 与桥臂间电压的关系
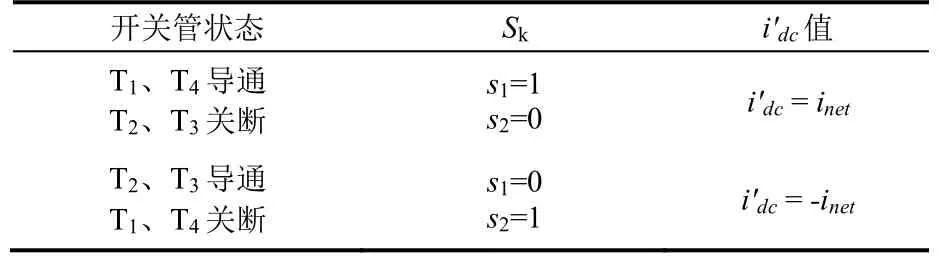
表2 Sk与DC-link 输入电流的关系
由表1、表2 可得:

假设状态变量x1=[inetudc]T,x2=[unetidc]T,x(t)=s1-s2,则变量状态方程为:

选取滑模切面为P-I 形式:

根据李雅普诺夫准则[11-14],才能满足滑动模态存在性使得系统稳定,所以在x(t)中加入非线性开关函数x′(t),即:
结合式(3)、式(6)可得:
将式(10)代入式(11)整理可得:

对式(12)进行讨论如下。
(1)当S>0时,sgn(S)=1,
(2)当S≤0时,sgn(S)=-1,
由讨论可知所提控制策略遵循李雅普诺夫准则,满足系统稳定性及滑动模态存在性。
2 仿真分析
选取参数udc=400 V,RL=0.01 Ω,,KP=0.5,Ki=295。L=6 mH,基于Smiulink 中对SMC 和PI 2 种控制方法进行仿真分析其各自响应输出如图3 所示。
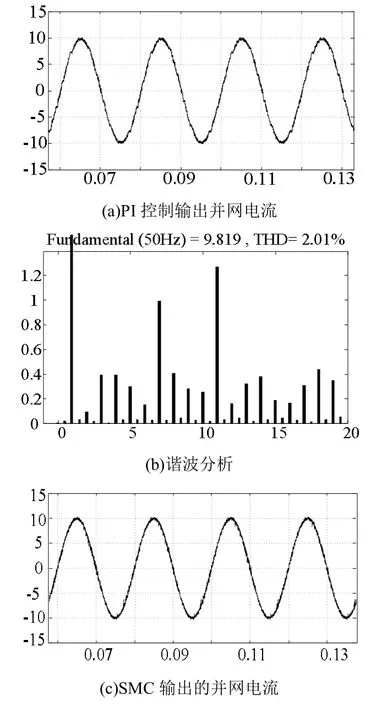
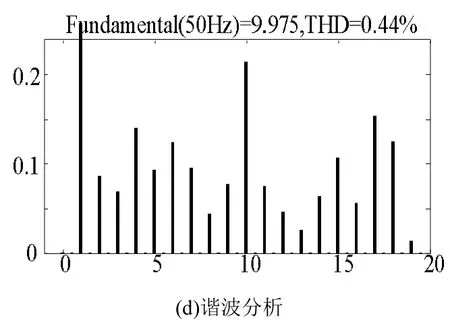
图3 DC/AC 电流控制仿真输出
图3 可知,PI 和SMC 2 种控制方法都能够很好对并网电流的进行跟踪。由谐波分析PI 控制的总谐波畸变率(THD)等于2.01%,SMC 控制的THD=0.44%。与PI 控制相比,滑模变结构控制输出的inet波形纹波很小,曲线光滑。
本文采用调制策略是双极性SPWM,并网电流inet纹波电流的大小为,当unet=0时并网电流过零点,此时纹波电流值最大为,可见,最大纹波电流值的大小与udc、L、fs有关[15]。其中,udc为直流DC-Link 电压;fs为开关频率,一般不变,所以纹波电流值与滤波电感L有关。当udc、fs和其他参数不变的情况下,改变L的值,此时PI 控制与SMC 的并网电流输出波形及谐波分析如图4 所示。
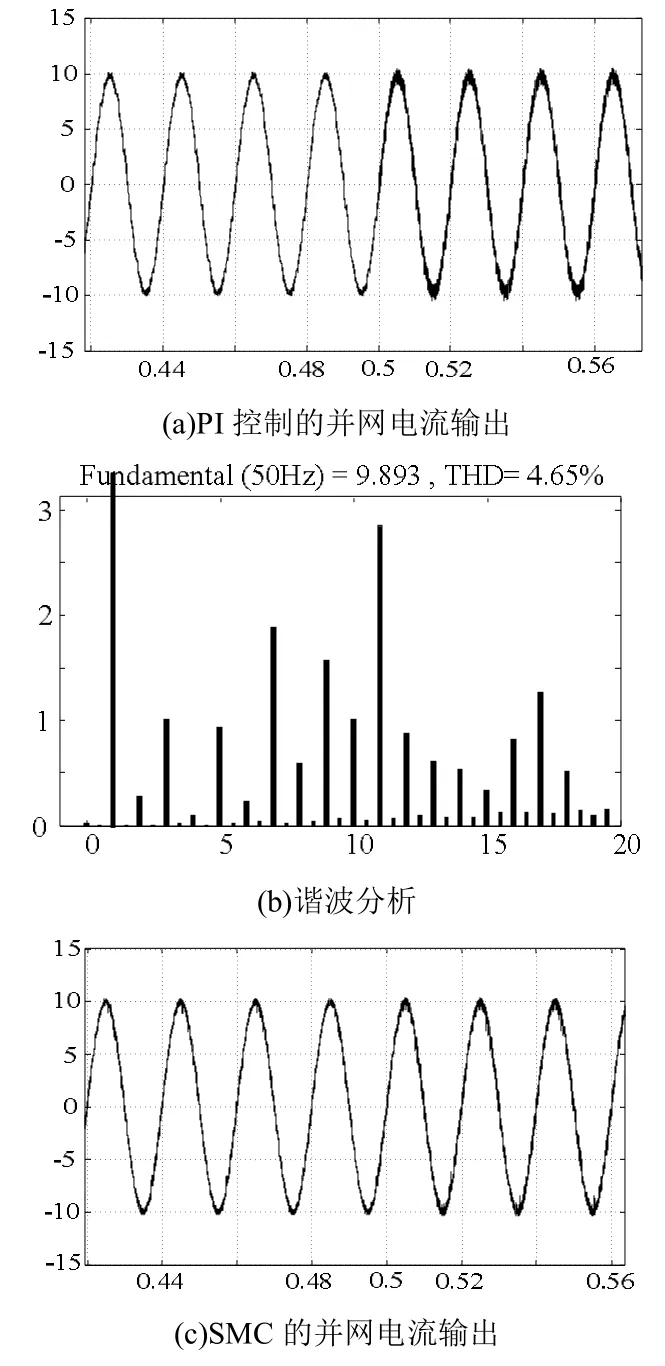
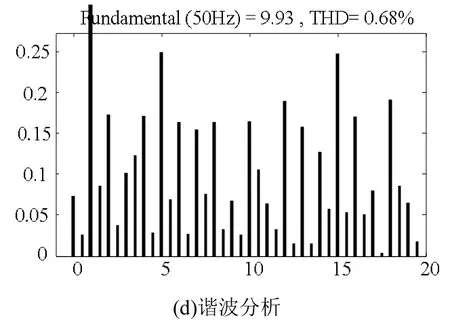
图4 电感发生变化时并网电流输出与谐波分析
由图4 可知,当L发生变化时,滑模变结构控制输出的inet的幅值、相位变化很小,只是纹波稍有增加,THD 由0.44%增加到0.68%,而PI 控制输出的并网电流波形变化较大,THD 由2.01%增加到4.65%,SMC 相比PI 控制THD 降低了90%以上,说明SMC 对参数变化不敏感,具有很好的鲁棒性。
上述结论是假设udc为400 V 得到的,由于udc对光照强度S和外界温度T很敏感,所以就S、T对udc影响做如下仿真分析:(1)当T、L不变,S由1 000 W/m2变化到800 W/m2时,udc及功率因数输出如图5 所示;(2)当S、L不变,T由50 ℃变化到25 ℃时,udc及功率因数输出如图6 所示。
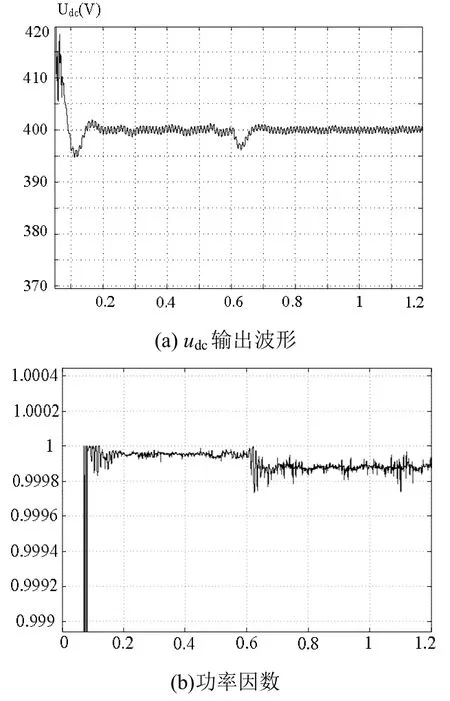
图5 S发生变化时udc及功率因数输出波形
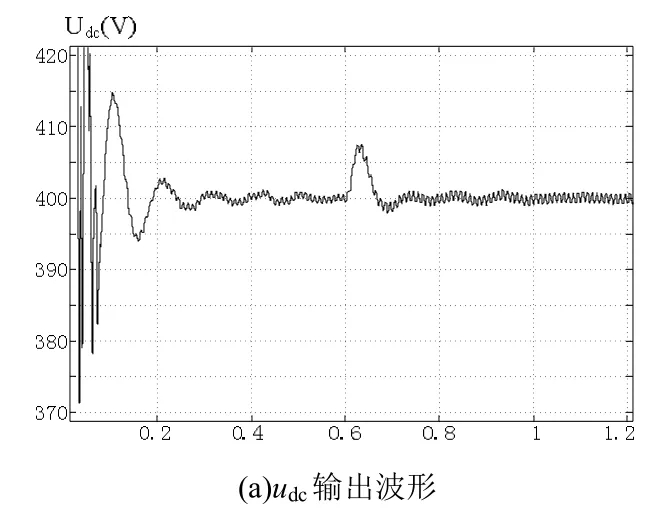
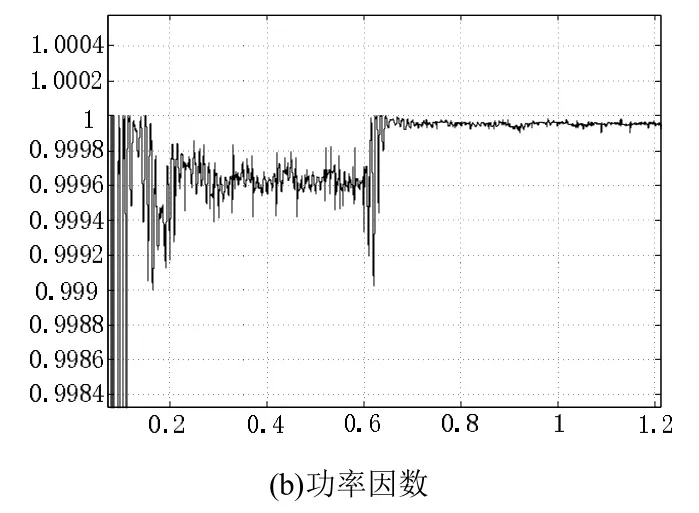
图6 T发生变化时udc及功率因数输出波形
从图5、图6 可以看出,外界输入光照强度或温度发生变化时,DC/DC 输出电压可迅速上升到400 V 左右,上下幅度变化很小;同时,输出波形畸变率小,功率因数很高接近1。
3 结论
将滑模变结构控制理论用于光伏并网逆变器控制中,首先推导并证明了滑模面的存在性及系统的稳定性;然后,基于MATLAB 仿真平台对SMC及传统的PI 控制方式进行仿真比较,同时分析了光照强度与外界温度发生变化对udc的影响,结果得到:(1)光照强度与外界温度发生变化时,udc幅度变化很小,在-1~1 V 之间,并且可快速跟踪电压(约0.06 s);(2)相比PI 控制,SMC 提高了并网系统的控制精度,THD 从2.01%降至0.44%;(3)改善了控制系统鲁棒性和跟踪特性,当电感发生变化时,SMC 相比PI 控制输出电流THD 降低了90%以上,同时,当光照、温度发生变化时,DC/DC 输出电压可迅速上升到400 V 左右,功率因数近似为1。以上结果证明了所选理论是正确可行的,并具有一定的优越性。
