一种新型半潜式平台概念设计研究
2020-10-27王天英王树青
王天英,王树青
(1. 中石化胜利石油工程有限公司 钻井工艺研究院,山东 东营 257000; 2. 中国海洋大学 工程学院,山东 青岛 266100)
随着陆上与近海石油资源的日益枯竭,深海资源的开发成为各国能源领域争夺的焦点,而深水油气田的开发依赖浮式平台等深水海洋工程装备。与张力腿平台(TLP)和立柱式平台(SPAR)相比较,半潜式平台具有稳性良好、抗风浪能力强、甲板面积大、可变载荷大、适用水深范围广等优点,是世界上应用最广泛且最具发展前途的浮式海洋油气勘探开发装备之一[1]。但传统的半潜式平台存在一些不足,如平台重心相对较高,使得平台的稳性储备不大;功能不够全面,尤其是储油能力不足;垂荡运动幅度较大,无法支持干式采油树,导致钻采作业操作成本高,作业效率低等。
针对传统式半潜平台的不足,近年来出现了一系列新型半潜式平台概念[2-7]。典型的有美国FloaTEC公司提出的桁架式半潜平台(truss semi)和可伸展吃水半潜式平台(ESEMI),法国Technip公司提出的展开式半潜式平台(EDP),美国SBM Atlantia公司开发的斜立柱半潜式平台(FourStar semi),Mansour和Huang提出的自由悬挂固体压载舱半潜式平台(FHS semi),Atkins公司研发的成对立柱式半潜平台概念 (paired-column semi)。这些新型平台的主要设计目标是减小平台的垂荡运动[1],以使在平台上布置具有干式采油树的顶张力立管(TTR)系统成为可能。模型试验研究发现,新型半潜式平台的垂荡幅值响应算子(RAO)值比传统半潜式平台低20%~25%[4]。虽然新型平台和新的设计技术使传统半潜式平台的垂荡运动性能得到有效改善,但新的问题也随之而来[1],如使用长立柱和深吃水引起的涡激振动,纵/横摇固有周期减小导致的运动性能降低,新结构带来的结构安全性挑战,长立柱使得船体码头安装和托航运输困难,深吃水导致平台成本急剧上升等。
另外,随着海洋油气开发规模的不断扩大,海洋油气勘探开发的主战场已经转向深海。地质油藏的不确定性和传统深海油气开发设施的高造价决定了深海油气田开发的高风险性,尤其在当前油价长期持续低迷的国际大环境下,最大限度地提高平台利用率是有效降低深海油气勘探开发成本的关键措施。为此,使用多功能平台已经成为深海油田开发的最佳选择。
现有技术的整合是新型海洋工程装备研发的一个重要方向。为此,通过克服现有半潜式平台的不足,并结合自升式平台甲板可以自由升降的优点[8],研发了一种自升式半潜多功能平台[9](jackup combined semisubmersible multifunction platform,简称为JCSM)。该平台可适应干式采油、湿式采油和干湿组合式采油等不同采油模式,同时具有钻井、早期生产、修井、油气处理与油气储运等多种功能,为未来海洋油气田开发提供了一种新的低成本全寿命解决方案。为了验证JCSM平台概念的先进性,使用一个工程算例,分析对比了传统半潜式平台与JCSM平台的稳性性能与运动性能。
1 JCSM平台研发理论基础
1.1 稳性的影响因素
增加稳性是增强浮式平台抗风暴能力,保证平台安全性的重要一环。深海恶劣且复杂的海洋环境条件,要求半潜式平台安全性能更高,抗风暴能力更强,因此设计时应尽量保障平台具有较高的安全与稳性裕度。
根据船舶静水力学理论可知,有很多方法可以用来改进浮体稳性。例如,增加浮体的总宽,可以增大浮体的入水和出水楔体的静矩以及水线面横向惯性矩,增大浮体的静稳性臂和初稳性高,从而提高浮体的稳性;尽量加大浮体的型深或适当降低重心,从而获得更大的静稳性臂、极限静倾角和稳距值,对于改善浮体的稳性也非常有效;此外,把水线以上的剖线设计成适当外飘的形状,可以使大倾角时的回复力矩明显增大,从而使浮体稳性更加优良[10]。
1.2 垂荡运动的影响因素
水动力性能是衡量平台性能优劣的主要指标之一,不仅直接关系到平台能否安全,而且影响平台的作业效率及油田的经济效益。由于传统半潜式平台的垂荡固有周期在波浪能量集中的周期范围附近,所以垂荡运动幅值较大,需要增加升沉补偿系统才能达到钻井操作要求,也不能满足干式井口对顶张力立管的运动要求。干式井口具有经济实用、操作和维护方便等优越性,只能安装在垂荡运动较小的浮式平台上,因此,如何减小平台垂荡运动成为新型平台能否采用干式井口的关键。
忽略垂荡响应与其它方向上运动的耦合效应,半潜式平台的垂荡运动方程可以写为[11]:

(1)
假设平台中心处自由液面升高为ζ=ζαsinωt,k为小量,zm为下浮体几何中心距水线的高度。通过分析计算得到垂荡位移为:

(2)
式中:B为下浮体的宽度,k为波数,ωn为垂荡运动固有频率。
由式(1)和式(2)可知,平台垂荡运动的幅值与波面升高成正比,且随着zm和B的增大,垂荡幅值减小。
垂荡固有周期的公式为:

(3)
由式(3)可知,垂荡固有周期的主要影响因素为水线面面积和垂荡附加质量。水线面面积越小,垂荡附加质量越大,则平台的垂荡固有周期越大。另外,增加平台质量也可以增大垂荡固有周期,这可通过增大平台尺度或增加密度大的配重实现,具体设计时需综合考虑影响因素。
从以上的分析可以看出,在一定海洋环境条件下,平台吃水、水线面面积、垂荡附加质量以及下浮体的宽度是影响平台垂荡响应的主要参数。增加系统的阻尼,增加垂荡固有周期使之远离波浪能量范围,以及减小垂荡激励力等均可有效减小平台垂荡波频运动。另外,新型平台将通过对主体各个细节的仔细设计来改善平台的垂荡性能。例如,把通常垂直的浮体侧边改为相对于浮体中轴线倾斜设计,有助于增大浮体的垂荡绕射阻尼,从而减小平台所受垂荡激励力,降低垂荡运动[11]。
1.3 横摇运动的影响因素
除垂荡运动外,平台纵摇与横摇也是平台操作性的重要指标。摇动幅值过大会影响生产设施的正常操作、生产原油的质量及人员的居住环境。
因为浮体在水平面上关于对称轴对称,所以这里只研究横摇的情况。横摇固有周期的公式为[12]:

(4)
式中:Tn4为横摇固有周期,Ix为浮体总的横摇惯性矩,V为排水体积,h为横稳性高,r44是横摇惯性半径,A44为横摇附加质量。
根据式(4),对于给定排水量的浮体,有两个增大横摇固有周期,改善横摇运动的方法:增大横摇惯性矩或减小初稳性高。其中,初稳性高的作用尤其明显[12]。但是,减小初稳性高又与稳性要求相矛盾。因此,设计中有必要运用多学科协同优化原理[13],统筹调整影响浮体性能的主要设计变量,使浮体既获得优良的稳性性能,满足平台的抗风暴能力,又具有良好的水动力性能,满足平台的操作性要求。
2 JCSM平台概念及其优点
2.1 JCSM平台概述
针对现有半潜式平台存在的不足,在对平台运动性能、稳性以及储油能力等性能指标的影响因素进行详细地理论分析的基础上,将自升式平台与半潜式平台概念的优势结合在一起,并以平台综合性能的提升为目标进行浮体结构的细节优化,提出了一种新颖的自升式半潜多功能平台,并已获得国家专利授权[14]。图1即为所研发新型平台JCSM的一个实施例的技术方案。

图1 JCSM平台概念示意Fig. 1 Conceptual diagram of JCSM
如图1所示,自升式半潜多功能平台包括甲板、浮体和自升式桩腿三部分。其中,甲板为箱体结构的箱型甲板,箱型甲板内部分设多个设备舱室,箱型甲板中央预设有月池;浮体包括1个环形浮箱(下浮体)和4个或6个对称布设在环形浮箱上方外周的外斜立柱;自升式桩腿采用透空桁架结构,起到支撑甲板并且连接浮体的作用。
环形浮箱的横截面为方形倒圆角或矩形倒圆角,其外立面上均设有浮箱外伸翼,内部设有包括压载舱、储油舱、生产功能舱室、钻井设备舱室和泵舱。环形浮箱的部分压载舱采用永久固定压载方式,舱内填充重物,保证平台的浮心高于重心。环形浮箱的中央预设有中央井,且环形浮箱的中央井与箱型甲板月池的几何中心在同一条垂直线上。立柱沿环形浮箱几何中心的垂向轴线向外倾斜,且立柱之间通过连接筋相互连接。外斜立柱为中空密封结构,其横截面为圆形或正多边形倒圆角,立柱的内部空间分割为若干个水密舱室,立柱的外表面固定连接有螺旋形侧板。
平台根据工作海域的环境条件和水深,可选择锚泊定位、动力定位或组合定位等方式进行定位。
2.2 JCSM平台的优点
多个部件的设计特点与设计细节的改善使得JCSM平台具有诸多优点,详述如下。
2.2.1 自升式桩腿
自升式桩腿设计解除了常规半潜式平台设计中立柱与上部甲板的强耦合作用[15]。JCSM平台的甲板由自升式桩腿支撑,不与浮体直接接触,克服了立柱尺寸和间距对甲板设计的影响。设计者可自行定义甲板尺寸,使甲板面积和形状设计更好地满足甲板工艺模块的操作流程要求,提高平台作业效率和上部设施布置的安全性。同样,上部组块对浮体设计的限制也较小,立柱尺寸和间距、浮箱的尺寸和形状等都可进行大范围的优化,从而改善平台的稳性性能和水动力性能。这样,上部甲板和立柱可以相对独立地进行设计,更容易实现平台总体性能的最优化设计。
根据海洋环境条件和工况及载况的不同,通过甲板与自升式桩腿之间的升降装置,甲板可以沿自升式桩腿升降,以合理调节甲板至浮箱之间的桩腿长度,并结合浮箱压载量的增减,从而达到最优化平台重心高度、排水量、惯性矩和水线面面积的目的,使平台更好地适应不同海域的作业条件。
自升式桩腿采用透空桁架结构,可以显著减少钢材用量;在海流流速较大的海域,减小水平拖曳力,从而减小平台运动幅度与系泊力;而且,还可以减小波浪沿桩腿的爬升,有效改善平台气隙性能。
拖航或移位作业时,将甲板沿自升式桩腿下降至靠近环形浮箱,可尽量降低平台重心,减小受风面积,提高平台的拖航稳性。到达预定井位后,再将甲板升至半潜吃水的目标位置,然后安装立管,进行作业。大大降低了海上安装的周期和费用。拖航时的JCSM平台如图2所示。
2.2.2 外斜立柱
综上,教堂广场区域作为中心区的广场空间处于视线聚集性较低的区域,空间吸引到达的交通潜力较小.而实际调研结果也明显反应出:虽然天主教堂特殊的文化底蕴吸引游客前来游览,但当游客来到教堂广场区域时,视线集中于教堂之上,在拍照参观之后一般选择离开广场,或在教堂东部的树荫下休憩.位于中心区域的广场却常常被人忽视,空间利用率较低.
立柱的外斜设计能够改善稳性、纵/横摇和垂荡运动性能,减小涡激振动和降低波浪爬升高度。外斜侧面使得水线面处立柱间距较大,因而平台的水线面惯性矩较大,从而可获得较大的初稳性高度和回复力矩,减小平台纵/横摇运动以及系泊系统的受力;相对于浮体中轴线倾斜的立柱增大了浮体的辐射阻尼,增大垂荡固有周期,进而降低浮体的垂向运动;有效增强浮体绕流的三维效应,抑制涡激振动的产生,减少平台、系缆、立管等结构的疲劳损坏;减小立柱内侧边波浪的相互干扰和叠加效应,降低波浪爬升高度。
2.2.3 带外伸翼的环形浮箱
JCSM平台的下浮体为宽大的箱形结构,其尖角处设计为倒圆角,可减小波浪的拖曳力。环形浮箱中的部分压载舱采用永久固定压载方式,舱内填充铁矿砂或其它重物,可显著降低平台的重心,保证平台在任何时刻浮心高于重心,另外配置压载水舱,用于调节平台吃水深度使其达到设计吃水位置,使平台在服役期间保持较深的吃水状态以减小垂荡激励力。不仅实现平台在海洋环境中的无条件稳定,而且密度大的配重增大了垂荡固有周期,改善了平台的垂荡运动性能,克服了传统半潜式平台垂荡幅度大的固有缺陷,从而可以在平台上配置干式采油系统。
环形浮箱在外斜立柱的外侧有所延伸,形成浮箱外伸翼。浮箱外伸翼增大了舱室容积、排水量和储油量,使得JCSM平台较其它新型深吃水半潜平台吃水深度小而排水量大,不需大型浮吊配合,即可实现海上的简便安装。平台可在码头靠泊状态下将上部甲板与下部浮体通过桩腿进行整体组装和调试。
浮箱外伸翼还可兼起到垂荡板功能,改善平台的横/纵摇和垂荡运动性能。另外,通过内部舱室优化设计,将排水量分隔在合理的位置,可以获得比同等排水量的传统半潜式平台更高的附加质量。浮箱外伸翼还增加了可变载荷,使平台满足平台远海、深水或超深水长时期作业的自持能力要求。
而且,环形浮箱作为平台的整体支撑结构,使平台下部结构成为一个整体框架结构,将单根立柱遭受的载荷传递给平台整体结构,从而提高平台整体强度,有效抵抗作用于平台的环境载荷;同时,环形浮箱结构还可有效传递由于波浪和平台不平衡装载造成的各立柱之间的相互作用力。因此,平台具有很好的整体结构刚度和强度,可有效降低平台连接节点的疲劳热点应力,减少疲劳破坏,降低焊接、建造工艺难度,改善平台整体结构的疲劳寿命,提高平台适应恶劣海洋环境的能力。
JCSM平台外形对称,结构简洁,设计和建造难度小,尤其适合模块化设计和建造,从而缩短设计建造工期,降低成本。
3 JCSM平台总体性能与运动性能分析
3.1 数值计算模型
JCSM平台与相应的传统型半潜平台和新型深吃水半潜平台的主要主尺度参数见表1。上层甲板采用尺寸为90 m×90 m×8 m(长×宽×高)的矩形结构,甲板中间留有横截面为9 m×42 m的细长型月池,以方便双钻井设备通行。上层建筑主要参考已有半潜式平台的可受风构件,对其加以简化用于稳性计算。立柱尺寸为12 m×12 m×38 m(长×宽×高),侧边倒角为3 m。立柱的倾斜角度为与z轴正方向成30°夹角。自升式桩腿为横截面3 m×3 m,高度29 m的桁架结构。下浮箱的内、外边长分别为60 m和100 m,内、外倒角分别为4 m和5 m,高度为8 m。生存工况下平台吃水22 m,平台质量为65 157 t,重心位置为(0 m, 0 m, 22 m),转动半径分别为Rx=44 m,Ry=44 m,Rz=42 m。JCSM平台的3D模型如图3所示。

(续表)

图3 JCSM平台的3D模型Fig. 3 3D model of JCSM
3.2 稳性
通过固定转轴法[18]计算了生存工况下JCSM平台的完整稳性,风速为51.5 m/s。生存工况下,将甲板沿自升式桩腿尽量降低,以尽量增大JCSM平台的稳性裕量。图4为计算所得的完整稳性曲线。初稳性高为5.12 m,说明平台有很大的稳性储备;从0°至进水角范围内的面积比为4.63倍,远大于移动平台规范要求[19];从正浮至第二交点的所有角度范围内,复原力臂均为正值。因此,大倾角稳性的各项指标表明,JCSM平台具有很大的稳性储备,在极端海洋环境条件下安全性优良。
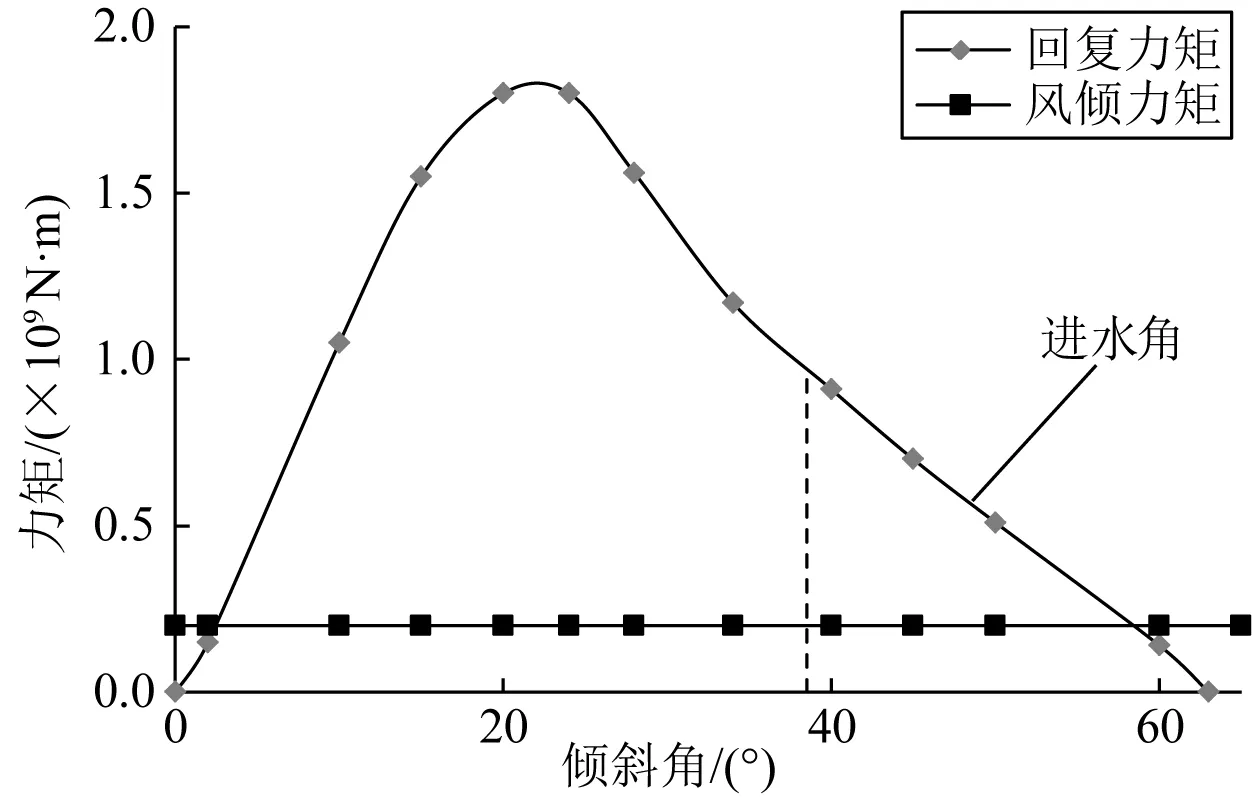
图4 风倾力矩与回复力矩曲线Fig. 4 Heeling moment and restoring moment curve
3.3 垂荡与横摇
采用SESAM软件,通过势流边界元方法对平台整体进行频域水动力计算,得到自由漂浮状态下JCSM平台6个自由度运动的水动力系数数据库,包括附加质量系数、势流阻尼、运动响应RAO曲线等。JCSM平台与具有相近浮体特征参数的传统半潜式平台浮体模型的垂荡运动和横摇运动RAO曲线对比分析如图5和图6所示。

图5 垂荡运动RAO曲线Fig. 5 RAO curve of heave motion

图6 横摇运动RAO曲线Fig. 6 RAO curve of roll motion
从图5可知,传统半潜平台的垂荡响应在波浪能量集中范围内发生了剧烈变化,而新型深吃水半潜平台和JCSM在20 s以内的垂荡运动幅值都比较小且平缓。深吃水半潜平台与传统半潜平台的垂荡响应峰值相近,约2 m,而JCSM的垂荡响应峰值明显小于深吃水半潜平台与传统半潜平台,且JCSM在5~25 s波浪能量集中的周期范围内,垂荡响应更加稳定和缓,其第一个峰值在28 s处约0.8 m,第二个峰值在39 s处约1.5 m。传统半潜平台的垂荡固有周期为18 s,深吃水半潜平台的垂荡固有周期为22 s,JCSM平台的垂荡固有周期为39 s。传统半潜平台的垂荡固有周期与波浪谱周期17 s比较接近,容易引起共振响应;深吃水半潜平台和JCSM平台的垂荡固有周期都能远离最大波浪周期;而JCSM平台的垂荡固有周期与现有新型深吃水半潜平台相比则更加远离最大波浪周期,处于波浪能量作用范围之外。垂荡RAO曲线的对比分析表明,JCSM平台能显著改善平台波频范围内的垂荡运动性能。
从图6可知,传统半潜平台的横摇响应在波浪能量集中范围内发生了剧烈变化,而新型深吃水半潜平台和JCSM在20 s以内波频附近的横摇运动幅值都比较小且平缓。传统半潜平台的横摇响应峰值为1.5°,深吃水半潜平台为2.3°,JCSM为1.2°。可知,深吃水半潜平台的横摇最大,操作性能变差;而JCSM的横摇响应峰值明显小于深吃水半潜平台与传统半潜平台,且JCSM在5~25 s波浪能量集中的周期范围内,横摇响应更加稳定和缓,其第一个峰值在10 s处约0.5°,第二个峰值在54 s处约1.2°。传统半潜平台的横摇固有周期为16 s,深吃水半潜平台的横摇固有周期为40 s,JCSM平台的横摇固有周期为53 s。传统半潜平台的横摇固有周期与波浪谱周期17 s比较接近,存在共振倾覆风险;深吃水半潜平台和JCSM平台的横摇固有周期都能远离最大波浪周期,远远离开了波浪能量作用的范围。横摇RAO曲线的对比分析表明,JCSM平台能显著改善平台波频范围内的横摇运动性能。
4 结 语
以技术性、安全性和经济性优越为目标研发了一种新型半潜式平台JCSM。所研发的新型平台充分利用自升式桩腿的长度调节功能和由外斜立柱与环形浮箱共同组成的浮体压载功能,可根据工况和海洋环境条件的不同灵活调节平台重心。所研发的新型平台稳性裕度大,水动力性能优越,能够支持干式采油树,可变载荷大,储油能力强,结构型式简洁,整体结构强度好,建造和安装的难度降低,同时具有钻井、修井、采油、生产处理等多重功能,作业效率高,可用于深水油气田开发的整个寿命过程中。平台综合性能和利用率的提高可大大降低油田整体开发成本,获得较高的油田开发经济效益。和常规的半潜式平台的稳性、垂荡运动响应和横摇运动响应进行了详细比较,结果表明,所研发的新型平台JCSM的运动特性优越。
JCSM平台拓展了常规半潜式平台的应用范围,是一种深水油气田开发的低成本、全生命周期解决方案,可适应深水复杂环境条件下的作业要求,具有重要的工业化应用价值。在后续的研究中,为了验证这种新颖的半潜式平台在我国南海海域的适用性,仍需对该概念进行稳性、时历运动响应、系泊系统设计以及物理模型试验等一系列关键技术的研究。另外,频域运动性能分析也发现,JCSM平台具有明显的低频运动特性,可能给系泊设计带来挑战,需要进一步研究。
