基于块正交匹配追踪预处理的米波多输入多输出雷达测高方法研究
2020-10-24郑桂妹宋玉伟胡国平李槟槟
郑桂妹 宋玉伟 胡国平 李槟槟 张 栋
①(空军工程大学防空反导学院 西安 710051)
②(空军预警学院 武汉 430019)
③(中国人民解放军66135部队 北京 100041)
1 引言
米波雷达一般指工作频率在米波段的雷达,典型的有甚高频(Very High Frequency,VHF)波段雷达,米波雷达的发展由来已久,可追述到二战中,用于防空预警扮演着重要角色。但米波雷达受限于波段太低、波束宽、波束掠地、地面反射回波幅度强,进而在低空目标测高时遇到相干多径、低信噪比的问题[1,2],最终导致米波雷达仰角测量精度差,无法满足制导精度要求(众所周知,雷达目标高度实质是通过测量目标仰角后根据目标距离计算得到)。故米波雷达的低仰角目标测高问题一直是阵列雷达信号处理中的重要问题之一。常规阵列的米波雷达测高目前有较为丰富的研究成果。其中有两类方法是研究的重点,一类是传统超分辨算法的移植和改进[3,4],这里地形因素是考虑重点[5];另一类则是基于人工智能的应用[6]。
将多输入多输出 (Multiple-Input Multiple-Output,MIMO)体制应用到米波雷达中,研究米波MIMO雷达低仰角目标的波达方向估计问题受到广泛关注[7—11]。考虑平坦阵地光滑表面的镜面反射,不同于常规阵列雷达一个目标对应于两条接收路径,一个目标对应的4条传输路径[12,13],具体为发射直达波-接收直达波、发射直达波-接收反射波、发射反射波-接收直达波、发射反射波-接收反射波。此时MIMO雷达不仅要面对相干源入射的问题,还要面临导向矢量相互渗透,或者有专家学者称之为锥角兼并的问题。故传统的相干源目标波达方向(Direction Of Arrival,DOA)估计或者双基地的DOA和DOD角度联合估计方法不能直接应用于MIMO阵列雷达的测高[12],如以多重信号分类(MUltiple SIgnal Classification,MUSIC)为代表的超分辨算法技术在MIMO阵列雷达测高中无法直接应用。最大似然算法可直接处理相干信号,是米波MIMO雷达测角问题中常用的算法,但是涉及到多维搜索的问题,使得本身就因MIMO阵列雷达自由度大而导致计算量大的问题进一步加剧。鉴于此,文献[12]提出了一种降维的最大似然估计算法,该算法通过预先得到的目标距离和天线高度等先验信息,利用直达波信号与反射波信号之间存在的几何关系,进行直达波和反射波的合并,使得最大似然只需进行一维搜索便可完成对目标仰角的估计,大大减少了运算量。此外,文献[14]提出用极化平滑后接广义MUSIC算法来解决低仰角目标相干的问题,能够解决常规阵列米波雷达测高在一些极端条件下的应用问题。
可看出最大似然和广义MUSIC是两种行之有效的MIMO雷达测高方法,但其计算量大。虽然利用直达波和反射波关系来降低搜索维数,但仍涉及到整个空域的搜索,计算量仍然较大。本文提出基于块正交匹配追踪(Block Orthogonal Matching Pursuit,BOMP)[15]预处理的方法来降低计算量。首先对MIMO阵列接收数据稀疏化处理,将其变形至适合于BOMP算法的信号模型,然后利用粗栅格搜索得到角度粗估计。以此为初始值中心,取MIMO雷达波束宽度作为搜索范围。这样处理的好处是既能保证最大似然和广义MUSIC高精度估计的优点,同时能大大降低其计算量。
2 信号模型
假设该MIMO雷达是一个收发共置的系统,其阵元有M个,且发射阵列为垂直均匀线阵,发射信号矢量为:φ(t)∈CM×1,假设该发射信号为正交信号(这是MIMO雷达区别于传统相控阵雷达的重要特征),则有其中,IM是大小为M的单位阵,Tp为雷达一个脉冲持续时间,即脉冲宽度。对于连续波雷达则需要整个发射时间段的发射信号之间相互正交。假设MIMO雷达系统的低仰角反射区域是光滑平坦反射面,如图1所示。
假设该系统的发射信号为水平极化信号,则其到达目标的信号可表示为

其中,θd为直达波角度,θs为反射波角度。at(θ)为发射阵列导向矢量等于
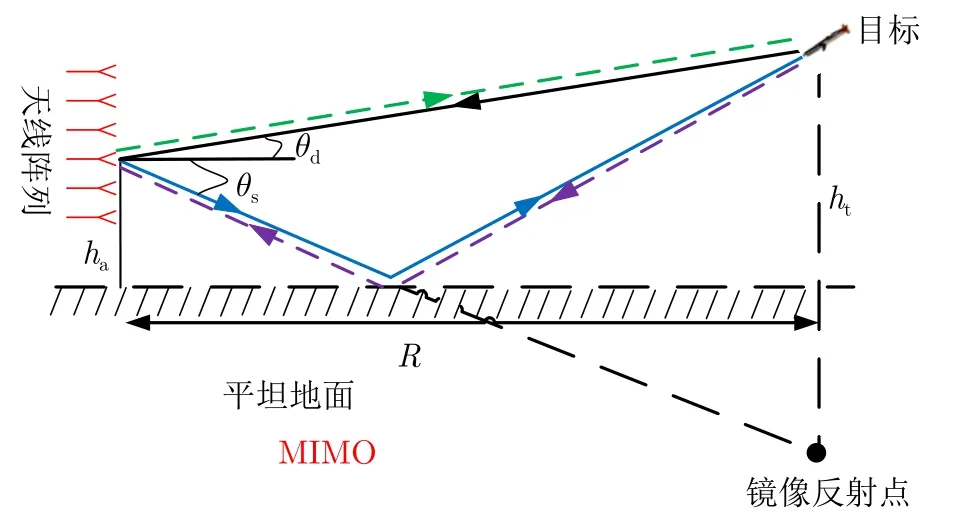
图1 米波MIMO雷达低仰角测高镜面反射模型示意图Fig.1 Schematic diagram of height measurement of low elevation target with meter wave MIMO radar under specular reflection model

d为阵元间隔。δ为直达波和反射波波程差所引起的相位差,其值等于其中ha为天线高度,ht为目标高度,λ为入射波长,R为目标垂直投影到地面的点到雷达的距离。需要注意的是波程差小于一个距离分辨单元,故在距离上区分不了直达和反射波。ρh为水平极化波的反射系数,其值等于

ε为表面复介电常数,通常可由相对介电常数εr和表面物质传导率σe表示εεr−j60λσe。另外,β(τ)αexp(j2πfdτ)为单个目标不同脉冲之间的复反射系数,是一个未知确定复常数,假设它服从Swelling 2型分布。则第m个接收阵元的接收数据为
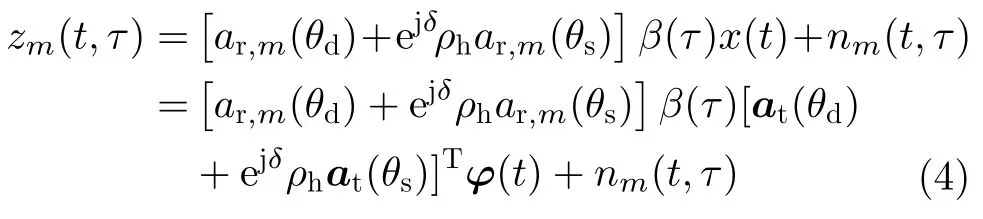
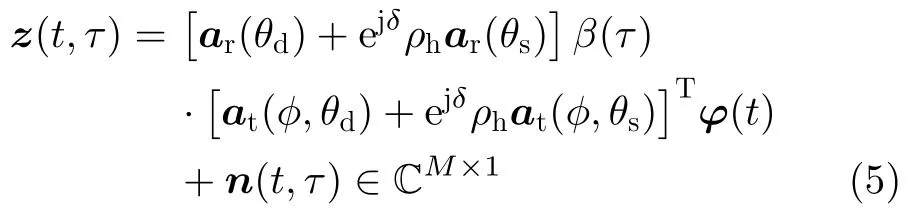
假设收发共置,接收导向矢量与发射导向矢量相等。根据上式,则整个阵列的接收数据可写成
利用发射信号对上式做匹配滤波可得
对上述数据进行矢量化操作可得
首先假设原始噪声是零均值高斯随机过程,则有E[n(t1,τ)n(t2,τ)H]σ2IMω(t1−t2),其中ω为冲击函数,σ2为噪声功率。则匹配滤波后噪声等于
根据文献[13]的结论,可得到经过匹配滤波、矢量化操作之后,噪声仍然是白噪声。
3 最大似然和广义MUSIC的米波MIMO雷达测高
研究表明常规相控阵列中的“相干信号”与“多径信号”的关系基本可以等同,所有对相干信号处理有效的算法均可应用于多径信号,如典型的空间平滑解相干算法。但MIMO雷达中“相干信号”与“多径信号”的关系不等效,因为MIMO雷达存在信号相互渗透的现象,导致传统空间平滑无法利用,进而导致传统基于子空间的经典超分辨算法旋转不变子空间算法(Estimation of Signal Parameter via Rotational Invariance,ESPRIT)和MUSIC无法直接利用。故无需解相干类的超分辨算法如最大似然算法和广义MUSIC算法在MIMO雷达测高得到充分使用,是两种行之有效的测高算法。下面简要回顾这两种算法。
3.1 最大似然
最大似然估计是阵列信号处理中最常用和最有效的参数估计方法之一。从其参数选取准则中可以看出,其算法并不受信号间相关性的影响。具体推导请详见参考文献[16]的第148页式(5)、式(2)和式(10)。最大似然估计准则可表示为


将式(7)中MIMO雷达接收数据中的信号源和导向矢量重新组合成如式(11)的形式
则可将式(7)中的接收数据写成如式(12)的形式

式(10)中的最大似然估计求解过程涉及两维非线性搜索,其计算量很大。可采用直达波和反射波的数学关系式来降低搜索维度,其关系式为

3.2 广义MUSIC
传统MUSIC算法是利用信号子空间和噪声子空间的正交性而建立。但在MIMO雷达中,受相干信号的影响,导致导向矢量与噪声子空间并不正交。即使采用某种方法去相干,其中导向矢量信号相互渗透,即at(θd)⊗ar(θs),从而导致导向矢量与噪声子空间并不正交,故传统MUSIC算法无法直接应用。广义MUSIC亦建立在信号子空间和噪声子空间正交基础上。但并没有利用导向矢量而是利用导向矩阵与噪声子空间正交的原理。这里面需要注意“导向矢量”、“导向矩阵”、“噪声子空间”之间的相互关系,总结如表1所示。

表1 阵列雷达噪声子空间和导向矢量、导向矩阵的正交性Tab.1 Orthogonality of noise subspace of array radar and steering vector,manifold matrix
从表1中可清晰看出,对于MIMO阵列雷达,传统MUSIC不可用,而广义MUSIC可用。对MIMO阵列雷达匹配滤波后接收数据协方差矩阵进行特征分解,得到噪声子空间En和信号子空间Es,根据文献[16]的推导,广义MUSIC谱为

其中,det[·]表示求其行列式,上式同样涉及两维搜索,可采用3.1节中的降维方法得到一维搜索谱估计。
4 基于BOMP的米波MIMO雷达测高粗估计
式(9)和式(14)的最大似然和广义MUSIC算法需全空域搜索,搜索范围太大。下面介绍一种单快拍条件下即可得到仰角粗估计的方法来缩小搜索范围,以此减少计算量。首先令式(12)中的τ1,即单快拍。对导向矢量和接收信号源采用稀疏表示。首先构造稀疏过完备矩阵A(ψ),ψ(θd,θs),如此构造过完备矩阵,则需要构造两维矩阵,其计算量很大,这里同样可利用直达波和反射波之间的关系式(13)来降低过完备字典的维数,即ψ(θd),L表示字典的长度,其中L远大于目标个数,这里设目标个数为K(事实上对于测高模型,目标为1)。则式(12)可以写成

其中z表示K块稀疏矢量。其中块的长度等于4。式(15)可利用BOMP算法去寻找支撑位置,从而计算出角度。下面简单给出BOMP算法与式(15)的对应关系。
目标则转化为找出块稀疏矢量z中目标的K个支撑位置,支撑位置就是目标的稀疏字典中仰角的位置。现将优化问题转化为


其中,V表示构造稀疏字典中的间隔度数。当快拍数多时,可用上述方法取得的结果求平均,事实上这里的结果仅作为粗估计的结果,为减少计算量可直接采用单快拍BOMP算法。
5 米波MIMO雷达测高的精确估计
此时,米波MIMO雷达的仰角初始估计值已经得到。在最大似然和广义MUSIC算法中以此为中心来确定搜索范围。下面给出搜索范围的基本原则。首先定义搜索范围为:θ(θcoarse+θ1,θcoarse−θ1)核心是确定θ1取值。这里的准则定为半波束宽度,,此时搜索范围等于一个波束宽度。如果目标功率降为波束宽度之外是检测不到目标的,故在单个波束宽度内搜索是合理的。MIMO雷达的波束宽度为:表示MIMO雷达的等效孔径阵元数,对于收发共置的MIMO雷达,有效孔径阵元数N2M −1,对于非等距线阵亦容易计算得到,这里不再赘述。测高的步骤如下:
步骤1 利用BOMP得到初始估计,并确定搜索范围。这里利用一个表格给出BOMP算法的计算流程,如表2所示。
步骤2 利用步骤1搜索范围,使用第3节中最大似然和广义MUSIC,得到最终角度估计值,然后根据目标距离转化成目标高度值。
本算法需要注意的有:对于米波MIMO阵列雷达模型,当目标的仰角小于波束宽度时,Rank(A)4,Rank(y)1,其中Rank(·)表示秩。如果按照常规阵列信号处理的角度考虑,可认为是4个目标,且相互相干。但是仔细观察会发现导向矩阵中存在信号相互渗透的现象,实际上只有两个不一样的角度入射到阵列,从参数估计的角度来考虑,可认为是2个信号源,故上面所提到的最大似然算法和广义MUSIC算法,均涉及到两维搜索。同样是因为相互渗透的原因导致信号的空间平移性不存在,进而导致空间平滑解相干算法不可用。既然不具备空间平移不变性,则传统超分辨算法ESPRIT亦不可用。对于经典超分辨算法MUSIC亦不可直接应用,作者会在另外一文中报道无需解相干的经典超分辨算法MUSIC在米波MIMO雷达测高中的应用。另一方面,本文算法是建立在平坦阵地模型之上。对于粗糙反射表面、地形起伏等复杂阵地条件下的米波MIMO雷达测高,本文算法不能直接应用。关于米波MIMO雷达复杂阵地条件下的研究,已有的成果[17]有地面反射系数未知的交替搜索MUSIC算法、反射面高度未知和多径数未知的条件下利用缩放字典逐层逼近的方法、以及基于秩1约束与压缩感知的低角目标测高算法等算法。这些算法能够解决部分复杂场景下的米波雷达测高问题。后续作者将在此基础上,研究不同阵元对应不同反射点高度即同一阵列雷达反射点起伏的测高估计问题,这也是测高最为复杂的问题之一。
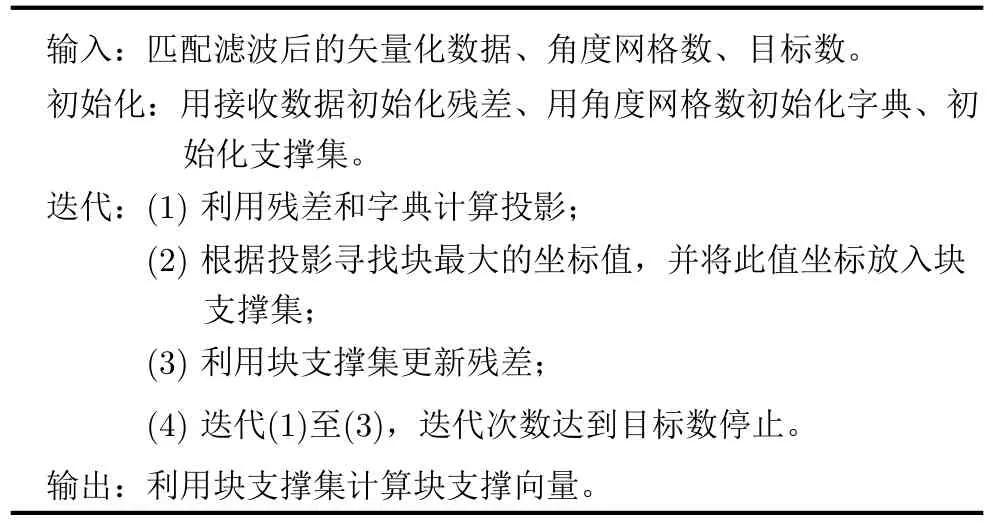
表2 BOMP算法的计算流程Tab.2 Calculation process of BOMP algorithm
6 计算机仿真
仿真1 BOMP预处理的支撑位置恢复情况。考虑该米波MIMO阵列雷达的发射阵元数M10,阵元间距为半波长布置。入射频率为300 MHz,入射波长λ1 m,目标直达波角度为5°,反射角角度根据式(14)计算得到。信噪比SNR0 dB。其中天线高度ha5 m,目标高度ht7000 m,设置淡水场景,则可设置反射系数中的介电常数εr80和表面物质传导率σe0.2。其中[:n◦:]表示每间隔n◦取一个数值来构造稀疏字典,这里设n1,则目标的理论仰角值的第1 个支撑位置为5×4+121。图2给出了其中一次独立实验的支撑位置估计结果。可看出该BOMP算法能够正确估计出目标仰角值。
仿真2 搜索范围选择的正确性验证。考虑该米波MIMO雷达的发射阵元数M10,入射频率为300 MHz,入射波长λ1 m,阵元间距为半波长布置。目标直达波角度为5°,反射角角度根据式(14)计算得到。信噪比SNR5 dB,快拍数10个,天线高度ha5 m,目标高度ht7000 m,设置淡水场景,则可设置反射系数中的介电常数εr80和表面物质传导率σe0.2。图3给出最大似然和广义MUSIC的全空域搜索的一次估计结果。图4给出10次独立实验的基于BOMP预处理后最大似然的搜索范围结果。图5给出10次独立实验的基于BOMP预处理后广义MUSIC的搜索范围结果。从图中可以看出本文算法能够正确的缩小搜索范围,从而降低计算量。
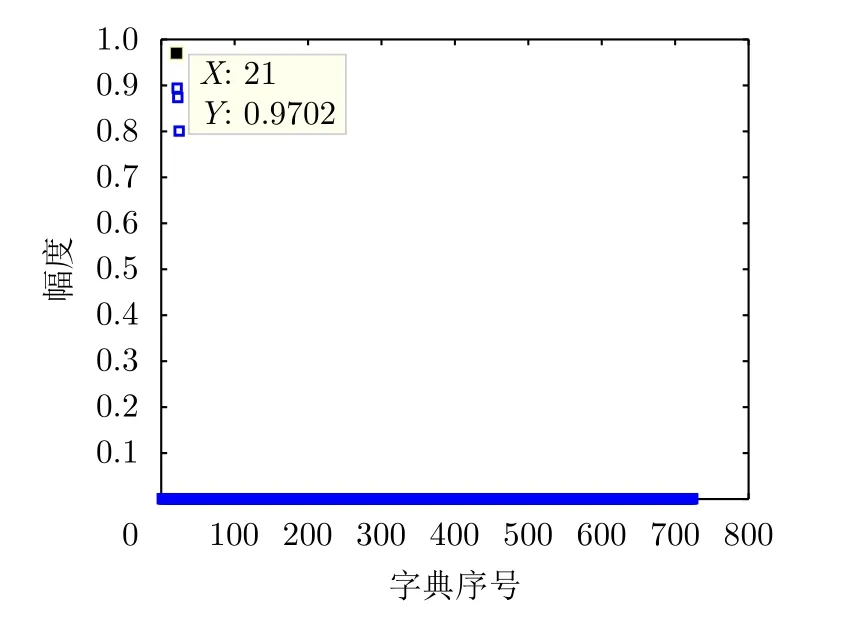
图2 基于BOMP稀疏恢复的支撑位置估计结果Fig.2 Support position estimation results based on BOMP sparse recovery algorithm
仿真3 最大似然和广义MUSIC算法仰角和高度估计结果。考虑该米波MIMO雷达的发射阵元数M10,入射频率为300 MHz,入射波长λ1 m。阵元间距为半波长布置。目标直达波角度为5°,反射角角度根据式(14)计算得到。信噪比变化,快拍数10个,天线高度ha5 m,目标高度ht7000 m,设置淡水场景,则可设置反射系数中的介电常数εr80和表面物质传导率σe0.2。完成1000次蒙特卡洛实验,并定义衡量估计性能的均方根误差(Root Mean Squared Error,RMSE)为:RMSE其中,直达波角度估计值,αθd为目标角度真实值。当目标高度估计值,αht为目标高度真实值。图6和图7中给出基于BOMP预处理后的最大似然和广义MUSIC算法的角度估计RMSE和高度测量RMSE,可以看出这两种算法能够正确应用在MIMO雷达对目标的测高领域。
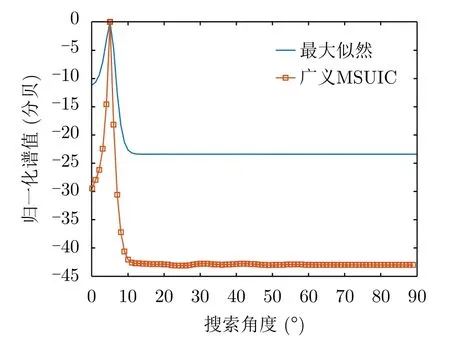
图3 最大似然和广义MUSIC的全空域搜索估计结果Fig.3 Estimation results of maximum likelihood and generalized MUSIC under whole airspace searching
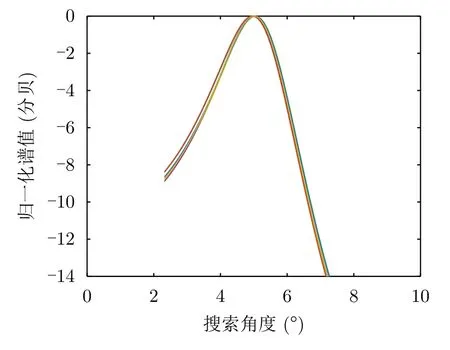
图4 10次独立实验的基于BOMP预处理后最大似然的搜索范围结果Fig.4 10 independent experiments results based on maximum likelihood after BOMP preprocessing
仿真4 预处理和非预处理算法运算时间的比较。考虑该米波MIMO雷达的发射阵元数从10变化到20,入射频率为300 MHz,入射波长λ1 m,阵元间距为半波长布置。目标直达波角度为5°,反射角角度根据式(14)计算得到。信噪比SNR5 dB,快拍数10个,天线高度ha5 m,目标高度ht7000 m,设置淡水场景,则可设置反射系数中的介电常数εr80和表面物质传导率σe0.2。图8给出最大似然和广义MUSIC的全空域搜索的运算时间和基于BOMP预处理后最大似然和广义MUSIC的运算时间对比。从图8中可以看出,本文算法能够有效降低计算量,阵元数越多,本文算法的优势越明显。
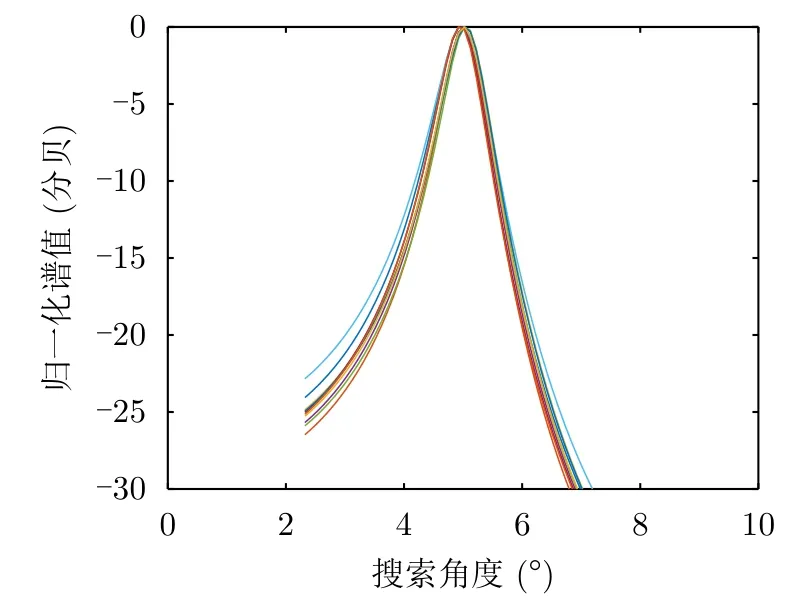
图5 10次独立实验的基于BOMP预处理后广义MUSIC的搜索范围结果Fig.5 10 independent experiments results based on generalized MUSIC after BOMP preprocessing
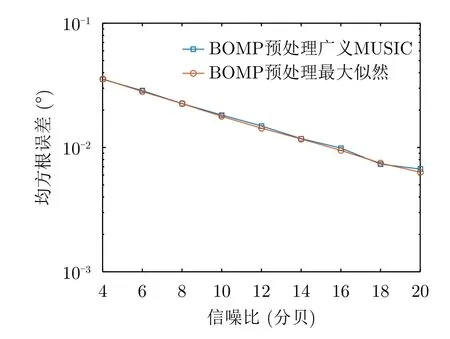
图6 最大似然和广义MUSIC算法的角度估计RMSEFig.6 RMSE of angle estimation with maximum likelihood and generalized MUSIC algorithms
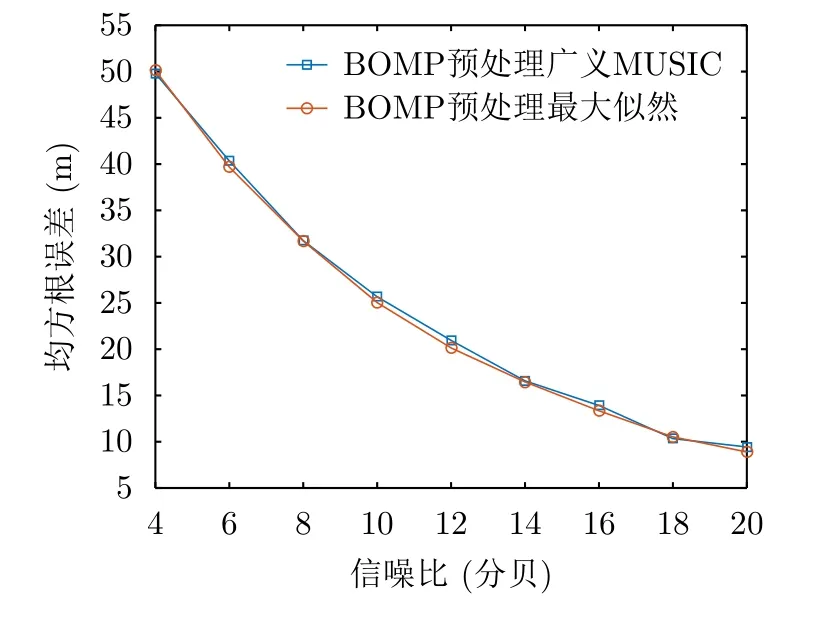
图7 最大似然和广义MUSIC算法的高度测量RMSEFig.7 RMSE of height measurement with maximum likelihood and generalized MUSIC algorithms
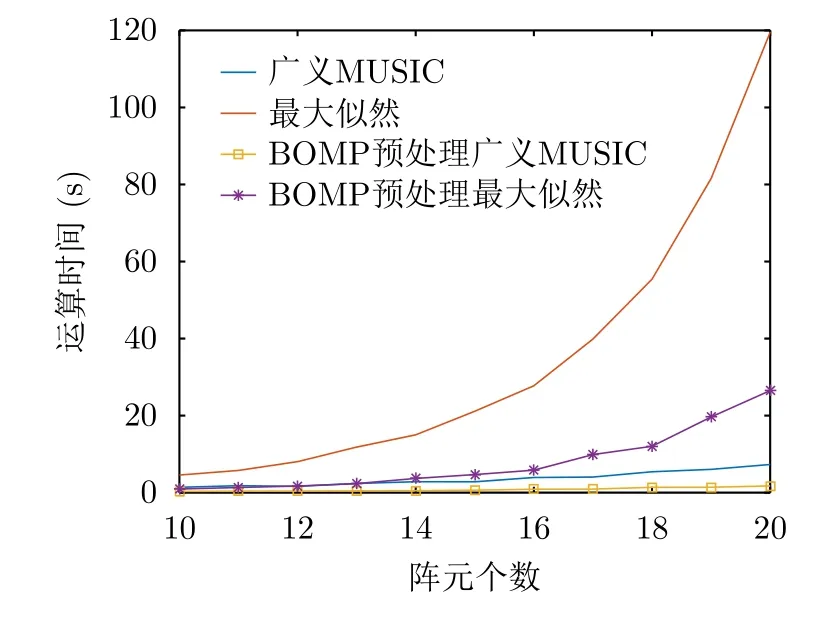
图8 预处理和非预处理算法运算时间比较结果Fig.8 Comparison results of run time of preprocessing and non-preprocessing algorithms
7 结论
本文研究了基于BOMP预处理的米波MIMO雷达的低仰角测高问题。首先给出传统最大似然和广义MUSIC算法的回顾。接着提出利用非解相干的稀疏恢复算法BOMP来粗测目标角度,然后缩小传统算法的角度搜索范围,从而降低了计算量。事实上,若不考虑计算量,BOMP亦可用。