飞鸟与无人机目标雷达探测与识别技术进展与展望
2020-10-24陈小龙陈唯实饶云华董云龙
陈小龙 陈唯实 饶云华 黄 勇 关 键 董云龙
①(海军航空大学 烟台 264001)
②(中国民航科学技术研究院机场研究所 北京 100028)
③(武汉大学电子信息学院 武汉 430072)
1 引言
鸟击是指航空器起降或飞行过程中与鸟类等相撞的事件,或是因为动物活动影响到正常飞行活动的事件[1]。全球每年约发生21000起鸟击事件,造成经济损失约12亿美元。随着航班量的持续增长和生态环境的不断好转,我国机场的鸟击防范工作压力越来越大,其带来的损失远远超出其它原因所致之损失,可以说飞鸟是航班起降阶段的传统安全威胁因素。近年来,以旋翼无人机(Unmanned Aerial Vehicle,UAV)等消费行无人机为代表的低空飞行器得到了快速发展,全国多个机场接连出现无人机“黑飞”扰航事件[2],非法放飞无人机成为新的焦点问题,同“鸟击”一起成为威胁机场净空区航班起降安全的“两大隐患”,如图1所示。
传统的机场鸟情观测依靠人工,但在目测困难的黎明、黄昏和夜晚,恰恰是鸟击事件的高发期。雷达探鸟系统能够克服天气因素、距离、昼夜变化等不利因素的影响,真正意义上实现全天24 h不间断获取空中鸟类的距离、方位、速度、高度等实时信息,实现鸟情不间断监测。经过30多年的发展,国内外已经研制出了相对成熟的“雷达探鸟系统”,最具代表性的是美国的Merlin雷达、加拿大的Accipiter雷达、荷兰的Robin雷达,以及中国民航科学技术研究院(简称“航科院”)开发的“机场雷达探鸟与驱赶联动系统”。2018年8月,民航局发布《机场新技术名录指南(2018—2020年度)》,聚焦机场运行安全和效率,兼顾便捷服务以及施工安全,共4大类25项新技术,鸟击防范技术位列其中。目前,多数探鸟雷达产品全部采用S波段水平扫描雷达与X波段垂直扫描雷达相结合的方式,并与部分驱鸟设备实现了联动,但机场普遍反应,目前的探鸟雷达系统的探测率低于75%,且存在一定虚警,探测效果还不能满足机场需求,联动系统驱鸟效果不明显。
无人机等低空飞行器的出现和迅速发展,对空中航路安全、城市安保等提出了严峻挑战[3]。2015年至今,为维护民航机场净空保护区域飞行安全,加强对无人机运行的管理,国家、各部委及民航局相继出台了多部规章标准,包括《无人驾驶航空器飞行管理暂行条例(征求意见稿)》、 《轻小无人机运行规定(试行)》、 《民用无人驾驶航空器实名制登记管理规定》、 《无人机云系统接口数据规范》、 《无人机围栏》等。在民航局于2018年8月发布的《机场新技术名录指南(2018—2020年度)》中,“鸟击防范技术”和“无人机反制技术”位列其中,在2019年1月的省部级领导干部研讨班上,习近平总书记再次强调“要加快科技安全预警监测体系建设,围绕无人机等领域,加快推进相关立法工作”。但目前,对无人机和飞鸟的监视,尤其是识别仍缺乏有效的技术和手段,“黑飞”和“扰航”现象仍十分普遍,一些简易航空器容易偏离预定航线,若进入重要区域上空,或被恐怖分子利用携带危险武器,将严重威胁公共安全,如图2所示。
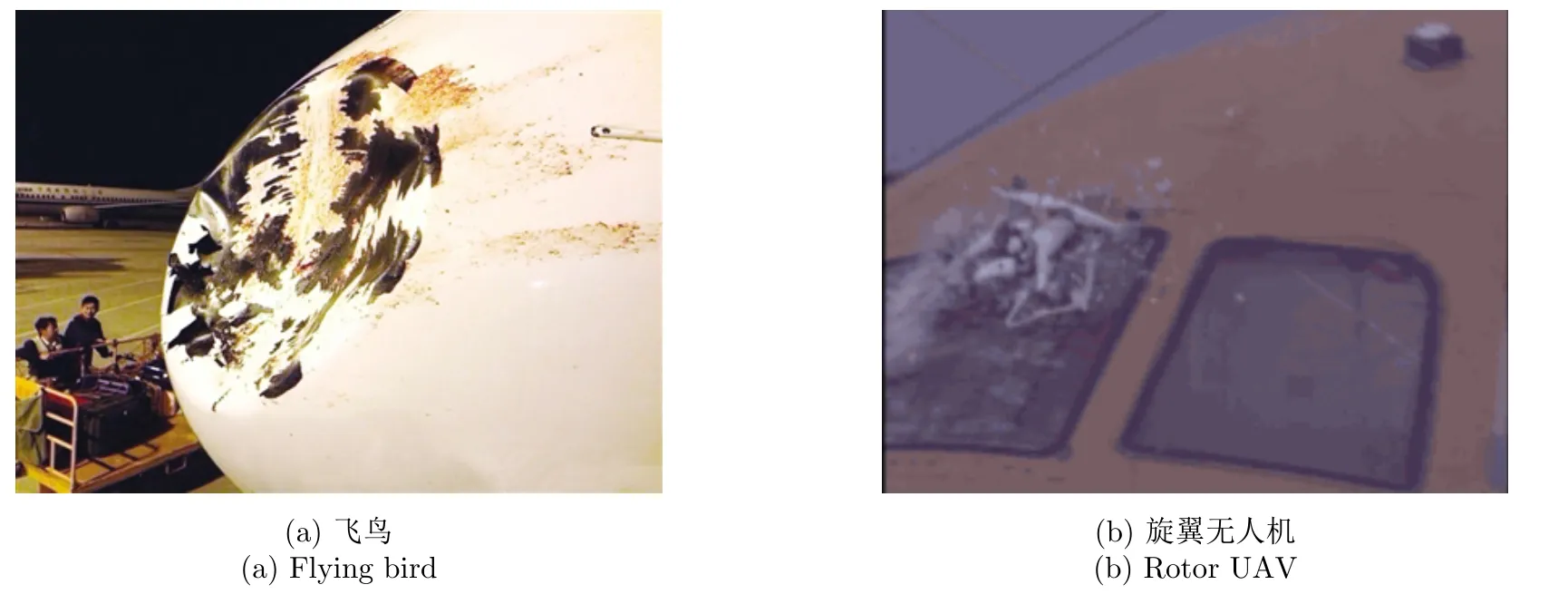
图1 飞鸟、无人机对民航飞机的威胁Fig.1 The threat of flying birds and UAVs to civil aviation aircraft
针对“合作”入网的无人机,其飞行信息实时接入“无人机云”等管理系统,监管部门可对误入相应区域的无人机进行查询、记录;针对“合作”但未入网的无人机,生产商可通过监听“飞控协议”,对相关品牌产品的飞行状态进行监控。上述合作式监管技术目前已能覆盖95%以上的消费级无人机,剩余不足5%的非合作飞行器是防范的重点和难点[4]。以机场净空区为例,针对无人机、飞鸟等不同的“低慢小”入侵目标,机场在发现目标后需要采取不同的反制措施:发现无人机目标后,机场首先发出预警,引导起降航班避让,并协调机场及地方公安进行处置;发现飞鸟目标后,机场将基于一定的驱鸟策略,综合采用多种驱鸟设备将其驱离危险区域或采取一定的规避措施。因此,有必要对无人机和飞鸟目标进行识别判性。
无人机和飞鸟目标种类繁多,其尺寸、形状及运动特性的不同导致目标具有不同的雷达散射特性和多普勒特性,是典型的“低慢小”目标[5],具有低可观测性[6,7]。具体体现在:(1)目标尺寸较小,散射截面积(Radar Cross Section,RCS)小,速度较慢,目标回波藏匿于强杂波或噪声背景中,信杂比低;(2)目标机动飞行导致多普勒扩散,目标回波难以积累;(3)雷达回波微弱,目标特征提取和估计难;(4)雷达精细化处理过程面临挑战,目标分类识别难度大。目前对“低慢小”目标检测方法主要涉及恒虚警检测(Constant False Alarm Rate,CFAR)、动目标显示(Moving Target Indicator,MTI)、动目标检测(Moving Target Detection,MTD)、相参积累、特征检测等方法。在利用现有技术对“低慢小”目标进行探测时,由于环境复杂(机场、城市、临海等)、虚假目标多、目标机动性强、有效观测时间短等诸多问题的存在,使得目标检测概率低、杂波虚警高、积累增益低、跟踪不稳定,给目标检测和判性带来极大困扰(图3),使得飞鸟和无人机探测成为世界性难题。由于部分涉及敏感关键技术,新技术和新方法也少有公开报道。迫切需要研发“看得见(检测能力强)、辨得明(识别概率高)”的非合作无人机、飞鸟等“低慢小”目标监视新手段和新技术,实现目标的精细化描述和识别。
本文集中对近年来复杂场景下旋翼无人机和飞鸟目标检测与识别技术的研究进展进行归纳总结,并分析该技术领域存在的问题,指出其发展趋势。本文内容安排如下:第2节介绍飞鸟和无人机探测的主要手段,包括国内外探鸟雷达的研发情况、非合作无人机目标的无线电监测、音频探测、光电探测、主动和被动雷达探测和识别手段,并介绍了相关的系统应用情况。第3节重点介绍飞鸟与无人机目标检测与分类识别的技术方法,一方面从目标特性认知与特征提取方面入手,介绍回波建模和微动特性认知方法、泛探模式下目标机动特征增强与提取技术以及分布式多视角微动特征提取技术,目的是提高检测能力,实现目标的精细化特征描述;另一方面结合机器学习或深度学习方法,提出目标智能识别的有效技术途径,依据运动轨迹差异实现区分无人机和飞鸟的目的;最后,介绍了作者团队在此方面的工作。第4节和第5节针对现有研究存在的不足,提出今后的研究发展趋势。第6节对全文归纳总结。

图2 无人机危害公共安全Fig.2 UAVs endanger public safety
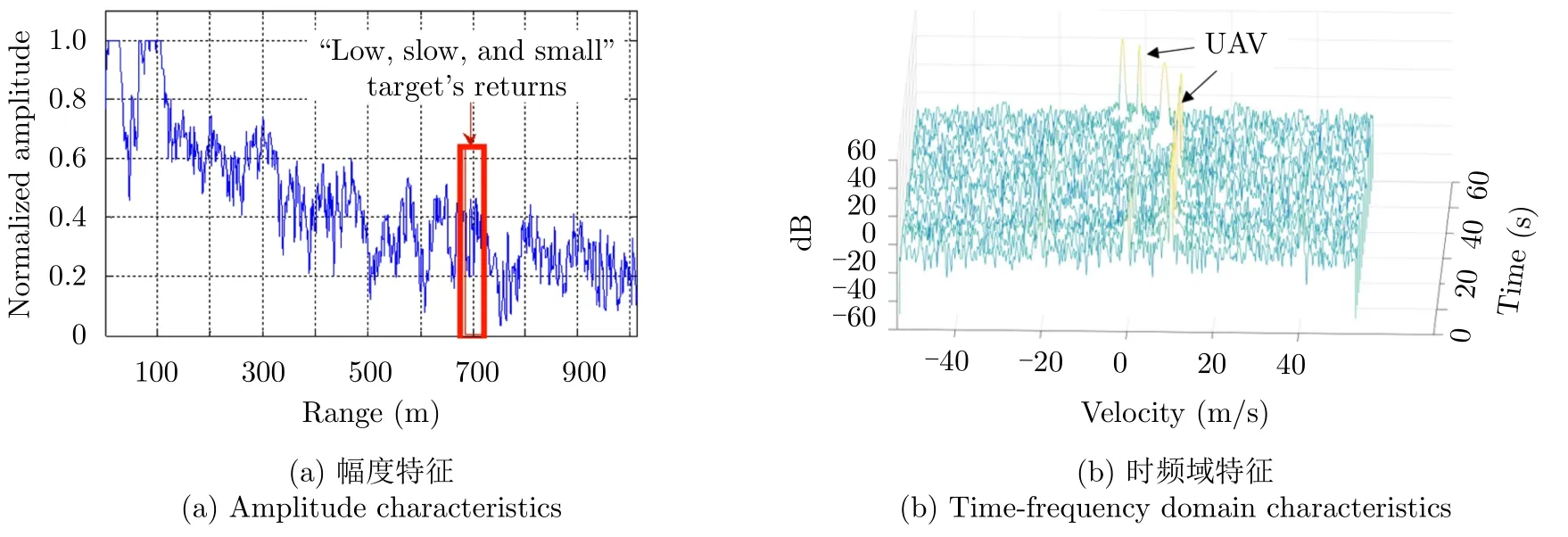
图3 “低慢小”目标雷达回波Fig.3 “Low,slow,small” target radar echo
2 飞鸟和无人机探测的主要手段
2.1 飞鸟目标探测
飞鸟是机场净空区的传统安全隐患。鸟击防范长期以来是威胁飞行安全的国际性难题,随着航班量的持续增长和生态环境的不断好转,我国机场的鸟击防范工作压力越来越大。雷达是鸟情观测的重要技术手段,其优点在于不受能见度等因素的限制,能够全天候自动运行。气象雷达和空中交通管制雷达最早被用于监视鸟类活动,特别是较大区域(几百千米)内的大群鸟类迁徙,但此类大型雷达分辨率较低,不适于机场等较小区域(10 km)内的鸟情观测。目前,应用较为广泛的雷达探鸟系统通常采用体积较小、功耗较低的海事雷达,通过对其天线、信号与数据处理等部分的改造,实现以更高的分辨率在较小的区域内跟踪小型鸟群或单只鸟运动。
图4给出了国外3款探鸟雷达及其获取的含有飞鸟目标的雷达图像[8,9]。2005年,Braun[10]回顾并比较了不同类型探鸟雷达的特点和用途。国际上,典型的探鸟雷达系统包括美国的Merlin雷达、加拿大的Accipiter雷达、以及荷兰的Robin雷达。如图4所示,Merlin雷达采用S波段水平扫描雷达覆盖机场周边的低空空域以及X波段垂直扫描雷达覆盖航空器的起降通道,并采用专业鸟情信息提取算法分离出飞鸟目标信息;Accipiter雷达为X波段抛物面天线,其波束较窄(4°),系统可获得较为精确的高度信息,但探测的范围有限;Robin雷达除了S波段水平和X波段垂直扫描雷达外,还包括一部调频连续波雷达,专为飞鸟目标判性设计。表1比较了3款探鸟雷达的技术特点和部署方式。在国内,航科院与北京航空航天大学2006年以来开展了雷达探鸟可行性验证,并利用航海雷达获取的视频图像开展了相关研究[11,12]。近年来,航天二院、北京理工大学、国防科大等单位也相继开展了基于相控阵、MIMO、全息雷达等先进雷达技术的雷达探鸟研究[13]。但是,目前大部分探鸟雷达仅能利用目标回波强度,按照鸟群、大鸟、中鸟、小鸟进行大致分类,且不具备区分飞鸟与无人机目标的能力。
2.2 非合作无人机目标探测
一般的消费级无人机价格便宜,小巧轻便,是干扰公共安全和破坏战略要地的入门手段,例如,无人机材料质地坚硬,其与高速飞行的飞机相撞,较之于鸟击的破坏力更大[14]。世界各国为此投入大量人力物力开展无人机反制技术研究,并形成了一批新型技术与设备[3]。现有探测技术主要分4类,即无线电监测、音频探测、光电探测和雷达探测技术[15],各技术的研究现状分述如下:
(1) 无线电监测手段。无线电监测采用射频扫描技术,针对民用无人机遥控和图传信号频段进行实时监测、分析和测向。该技术可通过扫描该频段得到无人机控制信号波形,与系统库中的无人机控制波形进行对比,判断是否存在遥控无人机并确定其类型[16—18]。罗德与施瓦茨(R&S)公司、国防科技大学、中电41所等均采用无线电侦测技术研制了相关系统,部分系统已在我国白云机场、宝安机场、双流机场试用,并取得良好效果,典型系统如图5(a)所示。但无线电监测单站测量通常只有目标方位信息,测量精度低,且对于巡航式电磁静默的无人机,该监测手段可能失效。
(2) 音频探测手段。每种无人机都有独特的螺旋桨旋转声,称为音频指纹,采集各种无人机的音频指纹可以建立数据库,通过将定向麦克风探测的音频数据与数据库进行匹配,不仅能够探测到无人机,还能够识别出无人机型号。韩国电子技术附属研究所、法国圣路易斯法德研究所、匈牙利欧布达大学等均研制了基于音频探测技术的无人机反制系统并提出了相关解决方案,典型系统如图5(b)所示[19—21]。但音频探测技术易受噪声、杂波影响,对于大型无人机效果较好,中小型无人机声音小,加之环境中的噪声干扰严重,导致探测效果不佳。

图4 典型探鸟雷达系统Fig.4 Typical avian radar systems

表1 国外3种典型探鸟雷达产品说明Tab.1 Description of three typical foreign avian radar products
(3) 光电探测手段。光电探测技术主要利用可见光和红外图像完成目标探测和识别。德国光电系统技术和图像开发研究院、长春光机所等均开发了基于光电技术的无人机探测系统,但光电探测易受环境光线干扰,且“低慢小”目标光电信号较弱、信噪比低,加之在机场环境下,大小目标遮蔽效应、飞机发动机强烈的红外辐射都使光电探测、识别、跟踪的难度进一步增大[22—24]。因此,光电探测技术通常作为雷达、无线电监测的补充确认设备。图5(c)所示为一种典型的雷达光电复合探测系统。
(4) 雷达探测手段。(a)主动雷达探测:雷达作为目标探测和监视的主要手段,在空中和海面目标监视以及预警探测等国防和公共安全领域应用广泛。虽然传统雷达对于“低慢小”目标存在探测效能不足的问题,但雷达仍作为对空目标探测的重要手段被广泛采用。随着雷达体制和信号处理技术的快速发展,其已具备获取微弱目标特性的潜力,为低可观测目标探测和识别提供了新的途径[7]。系统方面,开发低成本的新型雷达探测系统已受到世界各国防务公司和科研院所的重视。德国应用科学研究院(FHR)利用Ku波段MIMO体制雷达,针对无人机目标信号与杂波相互耦合的现象,通过环境数据训练检测器在杂波区和非杂波区的检测门限,改善了雷达对低速目标的检测性能[25]。英国防务公司Selex ES的“隼盾”(falcon shield)的电子战系统,该系统不仅能够探测、定位、识别、干扰、打击低空慢速飞行的小型无人机(“低慢小”目标),还能够接管目标无人机的指控权并引导其安全降落,系统由雷达、光电监视系统、指控组件、电子侦察与射频威胁管理系统等组成,雷达采用相参信号处理算法,提高目标抗杂波能力,如图6(a)所示。Blighter公司的反无人飞行器防御系统采用雷达准确定位无人机(图6(b)),然后通过发射定向大功率干扰射频,干扰无人机迫使其降落[26]。瑞典萨博公司拓展了“长颈鹿”AMB雷达能力,使其在常规模式下提供空中监视能力的同时,探测、分类和跟踪低速飞行的小型无人机,并已验证了在复杂环境下同时应对6架无人机目标的能力[27]。(b)被动雷达探测:主动雷达需要频率许可、电磁辐射大。某些应用场景,如机场净空区,具有严格的电磁准入制度,管理部门对主动雷达技术的使用通常持谨慎态度,即使是科学实验,也需要经过严格的审批流程,而外辐射源雷达具有功耗低、隐蔽性和覆盖性好等优点,作为一种经济安全的非合作目标探测手段近年来引起了学术界的广泛关注。尤其是随着硬件性能的提升,以及通信和无线网络等可用外辐射源的发展,外辐射源雷达引起了各国的普遍重视和深入研究[28,29]。德国应用科学研究院、瑞士国防装备采购局、法国国家航天航空研究中心、武汉大学等国内外科研机构利用电视、数字电视、数字音频广播、卫星及移动通信等信号作为雷达外辐射源进行了大量的理论与应用研究[30]。

图5 典型非合作无人机探测系统Fig.5 Typical non-cooperative UAV detection system

图6 国际典型的“低慢小”目标探测系统Fig.6 International typical “low,slow,small” target detection system
在低空目标探测方面,尤其是无人机探测方面,基于外辐射源雷达进行探测的研究得到广泛关注,英国斯凯莱德大学[28]研究了基于全球导航卫星系统(Global Navigation Satellite System,GNSS)信号的外辐射源雷达直升机目标分类识别,可实现直升机目标分类。芬兰奥鲁大学[31,32]开展了基于DVBT信号的外辐射源雷达直升机探测实验,观测到了直升机叶片转动的微多普勒效应,并进一步研究得到了边带频率谱线间隔与叶片转动速率之间的关系。华沙工业大学[33]基于DVB-T照射源也开展了类似的实验研究,推导了双基地下直升机旋转叶片回波数学模型。南非科学与工业研究理事会[34]开展了基于调频 (Frequency Modulated,FM)信号的螺旋桨飞机探测实验,成功提取到了螺旋桨回波微多普勒特征。罗马大学的Martelli等人[35]研究了利用地面数字电视广播(Digital Video Broadcasting-Terrestrial,DVB-T)外辐射源雷达AULOS在机场区域同时对无人机与民航飞机进行监测,其实验结果表明,通过长相干积累该雷达对机场周围飞行无人机(大疆精灵4和御)的单站探测距离可达约3 km,如图7所示。同时,他们还利用Wi-Fi信号对无人机进行了探测,研究表明可对3D空间无人机进行稳定跟踪,但其精度较差[36]。马来科技大学Rsa R A等人[37]从理论分析了利用DVB数字电视卫星信号进行无人机前向散射探测的可行性。
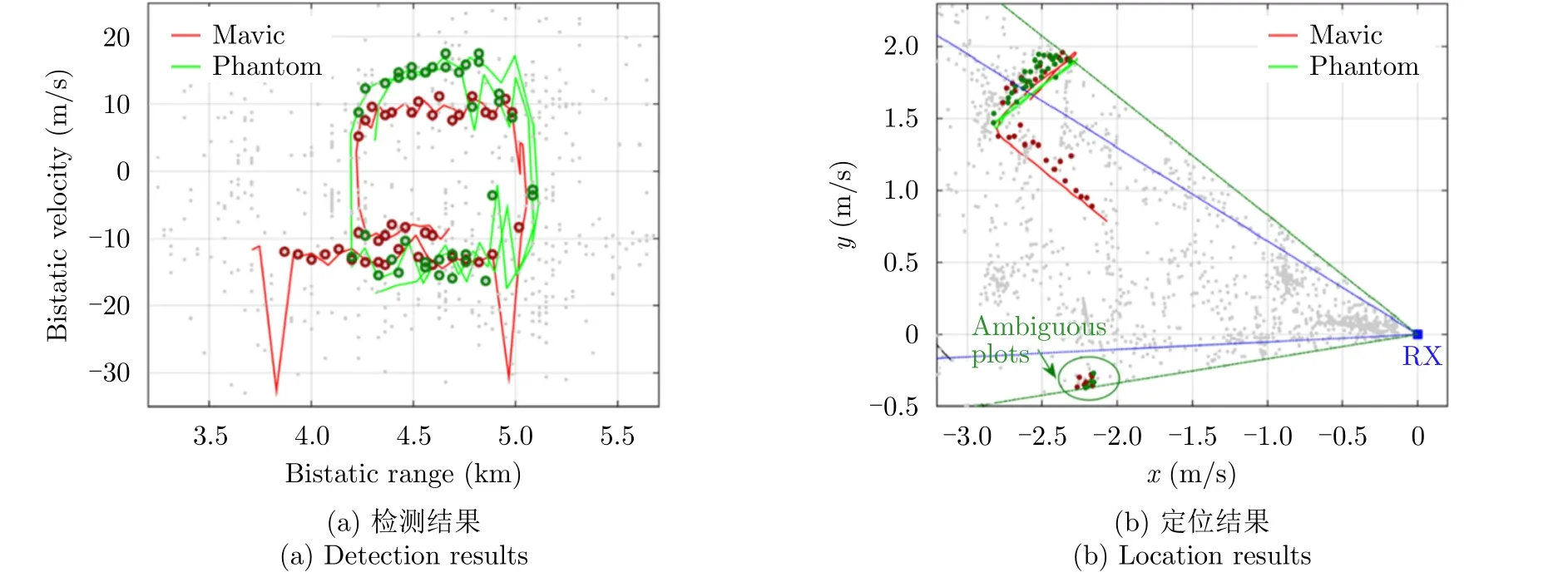
图7 DVB-T外辐射源雷达AULOS无人机探测结果[35]Fig.7 DVB-T passive radar AULOS UAV detection results[35]
国内,武汉大学[38—41]电波传播实验室在利用外辐射源雷达对无人机探测方面进行了较多的研究,利用数字电视地面广播(Digital Television terrestrial Multimedia Broadcasting,DTMB)信号进行无人机探测实验,结果表明通过杂波抑制后,对于典型的大疆精灵3无人机,其探测距离超过了3 km,如图8所示。图9给出了基于数字电视信号外辐射源雷达的无人机目标监视应用场景示例。
2.3 无人机目标雷达识别系统
国外相关机构在无人机分类和识别方面已经开展了研究并形成了产品,代表性的有:(1)德国应用科学研究院(FHR)[42]利用环境中的全球移动通信系统(Global System for Mobile communications,GSM)信号,构建了一套多通道外辐射源雷达探测系统GAMMA-2(图10),探索了外辐射源雷达获取“低慢小”目标微动特征的可能性;(2)法国国家航天航空研究中心(ONERA)[43]采用特高频(Ultra High Frequency,UHF)频段DVB-T信号,通过多频及单频组网探测,不仅可对3 km处的无人机目标实现连续定位跟踪,更能探测到多旋翼无人机的微多普勒效应,将该体制雷达对“低慢小”目标的探测推向更为精细化的应用;(3)荷兰TNO研究院进行了无人机微多普勒测量实验,利用经典时频分析方法进行微动特征提取;(4)英国伦敦大学[44]针对无人机的“低慢小”特性,通过布置一发三收S波段雷达系统NetRAD(图11),利用多旋翼无人机的微多普勒特性,弥补时域维探测效能不足的问题,提升目标的定位跟踪性能;(5)荷兰Robin公司[45]的新一代雷达采用调频连续波波形,利用微动特性区分无人机和飞鸟目标,同时具备无人机探测和识别功能(图12);(6)英国Aveillant公司[46]的全息雷达(图13)采用数字阵列体制,主要通过固定、凝视探测方式,延长驻留时间,能够获取目标的精细化特征表述,系统通过基于决策树分类器的机器学习算法,可对无人机目标和非无人机目标进行分类,同时雷达的软件系统可以分析目标的运动轨迹,从而将其与其他目标区分开来。

图8 基于DTMB外辐射源雷达的无人机探测实验[38]Fig.8 UAV detection experiment based on DTMB passive radar[38]

图9 基于数字电视信号外辐射源雷达的无人机目标监视应用场景示例Fig.9 UAV target surveillance application based on digital TV signal passive radar

图10 德国FHR多通道无源雷达系统GAMMA-2[42]Fig.10 German FHR multi-channel passive radar system GAMMA-2[42]
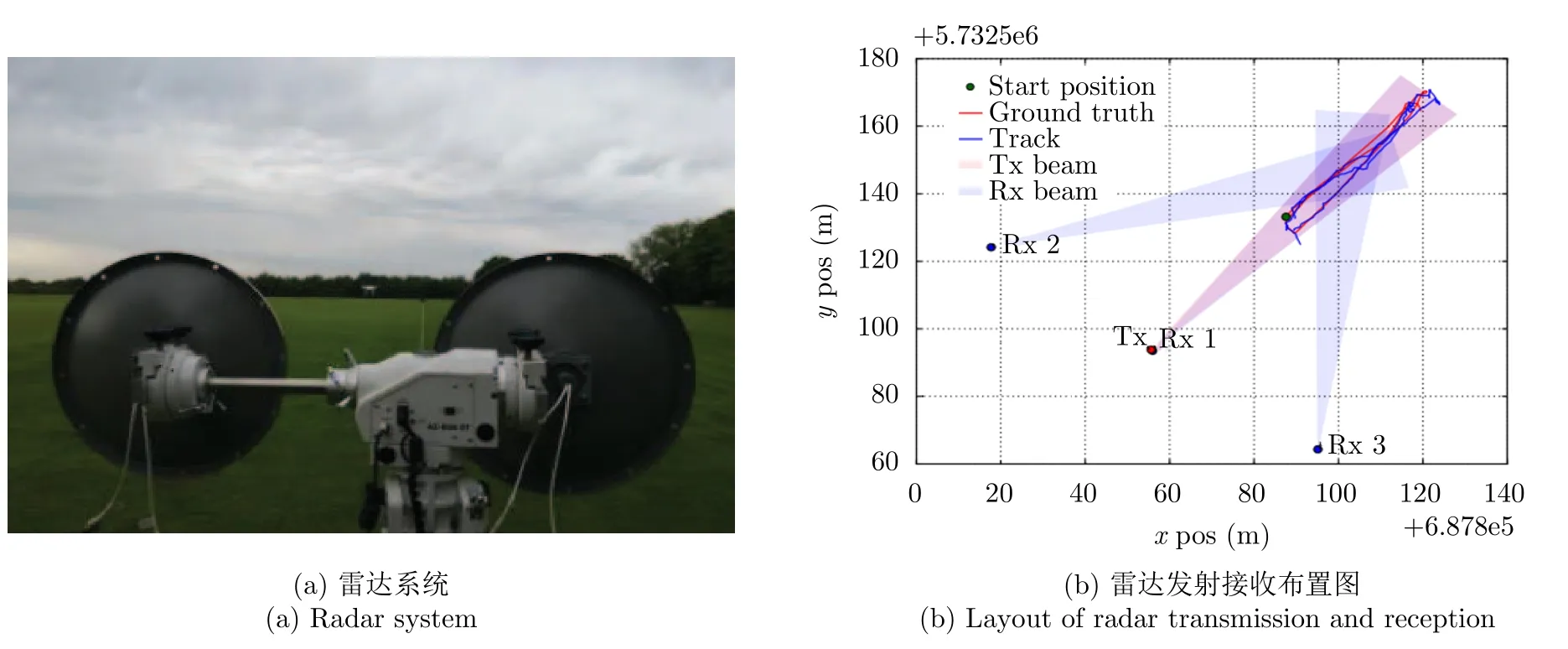
图11 英国伦敦大学NetRAD雷达系统[44]Fig.11 NetRAD radar system of university of London[44]

图12 荷兰Robin飞鸟/无人机识别雷达[45]Fig.12 The Robin birds/UAV recognition radar in Netherlands[45]
3 飞鸟与无人机目标检测与分类识别主要技术方法
3.1 飞鸟与无人机目标特性认知与特征提取方法
无人机和飞鸟均为非刚体目标,无人机旋翼的转动和飞鸟的翅膀扇动会在由主体平动产生的雷达回波多普勒频移信号附近引入额外的调制边带,该信号称为微多普勒信号,产生微多普勒效应[47]。微多普勒反映的是多普勒频移的瞬时特性,表征了目标微动的瞬时径向速度。微多普勒信号中所包含的信息可以反演出目标的形状、结构、姿态、表面材料电磁参数、受力状态及目标独一无二的运动特性[48]。旋翼无人机回波表现为主体和旋翼部件多普勒信号的叠加,不同类型和旋翼个数的无人机其微动特性也不尽相同。
(1)飞鸟与无人机目标雷达回波建模与特性认知。飞鸟与旋翼无人机目标的回波多普勒谱出现展宽,飞鸟翅膀扇动与无人机旋翼转动对回波产生调制特性,具有时变和周期性,体现出微动特征[49]。对飞鸟与旋翼无人机微多普勒特征的建模和精细特性认知是后续检测和目标分类的前提条件。旋翼无人机的回波信号表现为无人机主体多普勒信号和旋翼部件微多普勒信号的叠加,如图14所示。首先是对含微动部件的无人机目标主体运动和微动进行建模分析与参数化表征,推导多普勒频率、旋转速率、叶片数目和尺寸之间的对应关系[50]。对于多旋翼的无人机,假设各旋翼叶片的RCS相同且均为1,在直升机旋翼模型基础上,多旋转旋翼的无人机目标回波模型为[51,52]

图13 英国Aveillant公司全息雷达系统[46]Fig.13 The holographic radar system from Aveillant,UK[46]

式中,M为旋翼数,N为单个旋翼叶片数,L表示旋翼叶片长度,为雷达到第m个旋翼中心的距离,表示第m个旋翼叶片的高度,βm为雷达到第m个旋翼的俯仰角,Ωm为第m个旋翼的转动角频率,为第m个旋翼的初始旋转角。
回波信号的瞬时多普勒频率可由信号的相位函数求时间导数得到,得到第m个旋翼的第k个叶片的等效瞬时微多普勒频率为

图14 旋翼无人机微动特性[53]Fig.14 Micro-motion characteristics of six-rotor UAV[53]

由式(3)可知,多旋翼无人机微多普勒特征是由M ×N条正弦形式的曲线组成,且受到载频、旋翼数目、旋翼转速、叶片数、叶片长度、初始相位和俯仰角的影响。其中,载频、叶片长度和俯仰角仅与微多普勒频率幅度有关,而旋翼数目、旋翼转速、叶片数和初始相位将影响微多普勒特征曲线的幅度和相位。进一步分析飞鸟和无人机目标的微动特征差异,图15—图17给出了两种目标微动信号的初步仿真对比结果。图15为X波段雷达的飞鸟、四旋翼无人机和无人直升机的微多普勒时频图,通过对比可知,飞鸟目标微多普勒多集中在低频区,振动周期较长,这与不同类型鸟类翅膀的扑翼运动特点密切相关,而无人机目标的微动特征呈现明显的周期特性,根据旋翼转速和长度的不同,转动频率和周期也不同,由此可知,飞鸟目标和无人机微动特性有明显差异。图16为仿真的飞鸟目标外辐射源雷达微动特性分析,外辐射源中心频率分别为658 MHz和900 MHz,由于照射源的频率较低,波长较长,导致微动特性并不明显。图17为武汉大学前期开展的无人机微多普勒效应实验结果,探测大疆M100无人机,该无人机旋翼数为4,每旋翼叶片数为2,叶片长度17.25 cm,最大转速为129.5 rps,无人机处于悬停状态,可知,各旋翼旋转叶片的调制回波凸显,表现为频谱的展宽,能观察到无人机的微多普勒效应,且各旋翼转速的不同导致占据多个多普勒单元。
图18给出了大疆S900无人机和猫头鹰的微多普勒特征对比[54],由于无人机旋翼转速较快,其微动周期明显快于飞鸟,但强度弱于飞鸟目标微多普勒,此外,由于飞鸟机动导致的翅膀扇动不规律,使其微多普勒更为复杂。无人机和飞鸟微动特征有明显差异,从而为无人机和飞鸟目标的准确探测与精确识别提供不依赖于先验信息、可靠性高、可分性好的重要特征依据。目前,利用微动特征进行飞鸟和无人机目标识别的主要难点是“低慢小”目标回波微弱,微动特征提取难,时频分辨力低,分类和识别难,且目标与微动特征的对应关系尚不明确。

图15 飞鸟与无人机微动特征差异Fig.15 Differences in micromotion characteristics of flying birds and UAVs

图17 无人机目标实测微动特性分析(外辐射源中心频率658 MHz)[39]Fig.17 Analysis of measured m-D characteristics of UAV target (center frequency of external radiation source 658 MHz)[39]
(2) 泛探模式下机动特征增强与提取技术。利用泛探观测模式能够通过延长积累时间,获取高的信号处理增益、提高速度分辨率,并从多域(时频域、变换域、特征域)、多维(回波序列、二维微动时频图、距离-多普勒图、变换域图)、多视角(多接收站位)分析目标运动特征,可实现复杂微动特征高精度提取、机动特征的精确描述[7]。
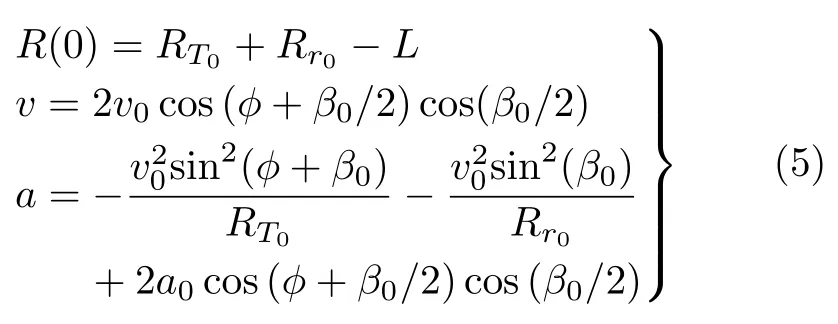
假设一种外辐射源雷达的双基地配置,如图19所示[29]。T0和R0分别为发射站和接收站,L为基线距离。设初始时刻目标位于O点,t时刻运动到O'点,和RT(t)分别为初始时刻和t时刻目标距发射站的距离,和Rr(t)分别为初始时刻和t时刻目标距接收站的距离,目标做匀加速运动,初始速度为v0,加速度为a0,β0为初始时刻的双基地角,ϕ为目标运动方向。若基带信号为s(t),t时刻目标回波相对直达波的延时τ=R(t)/c0,R(t)RT(t)+Rr(t)−L,c0为光速,λ为波长。将R(t)在t=0处Taylor展开,并忽略2次以上项,则回波信号模型可简化为

图18 无人机和飞鸟目标微多普勒(24 GHz)[54]Fig.18 Micro-Doppler (24 GHz) for UAV and bird targets[54]

图19 双基地外辐射源雷达配置图Fig.19 Configuration diagram of bistatic passive radar

式中,fc为载波频率,A0为回波信号幅度,t和tm分别为进行外辐射源信号二维分时处理后的快时间和慢时间,如中国移动多媒体广播(China Mobile Multimedia Broadcasting,CMMB)信号规定1 s的信号为1帧,并将其划分为40个时隙,每个时隙长25 ms,又可划分为1个信标和53个正交频分复用(Orthogonal Frequency Division Multiplexing,OFDM)符号,以OFDM符号为处理单元划分快时间和慢时间
由此可知,在较长的观测时间内,目标的时延和多普勒频率分布一定区间内,即同一个目标可能对应多个距离单元和多普勒单元,产生距离徙动和多普勒徙动。距离徙动的大小取决于目标速度在双基角平分线的投影值与平台速度在观测角平分线的切向投影值;多普勒徙动取决于目标、平台速度的切向分量及目标距发射站、接收站距离,基线距离,以及目标、平台加速度的切向分量。
若目标做高阶机动,则可将长时间信号模型统一为

3阶多项式可描述大部分的机动目标的运动,即

传统的距离和多普勒徙动补偿方法多为分段分步补偿,即先进行距离徙动补偿,后进行多普勒徙动补偿,算法复杂且后续补偿性能受制于前续结果,不能实现回波信号的长时间快速相参积累。基于参数搜索的长时间相参积累(Long-Time Coherent Integration,LTCI)方法[55—57]根据预先设定的目标运动参数(初始距离、速度和加速度)搜索范围,提取位于距离-慢时间二维平面中的目标观测值,然后在相应的变换域选择合适的变换参数对该观测值进行匹配和积累,但该方法的主要问题在于需要多维参数搜索,导致运算量较大,增加了工程应用的难度。
为此,可基于非参数搜索的长时间相参积累方法,通过快速降阶处理和多项式相位补偿等思路,提高算法运算效率。文献[58]提出了一种基于非均匀采样降阶运算和变标尺度变换(Non-Uniform resampling and Scale Processing,NUSP)的机动目标长时间相参积累检测方法(NUSP-LTCI),如图20所示,并用于低空飞行目标检测,该方法仅通过1次非均匀采样降阶运算,将高阶相位信号降阶至1阶相位信号,相比传统逐次降阶法降低了交叉项的影响,提高了参数估计精度;无需参数搜索匹配计算,降低了运算量,适合工程应用;能够同时补偿距离和高阶多普勒走动,实现长时间相参积累,提高雷达强杂波背景下的机动目标检测能力。如图21给出了一低空直升机目标雷达相参积累结果对比分析,可以看出NUSP-LTCI方法在杂波抑制能力和参数估计精度等方面较传统的MTD和经典Radon傅里叶变换(Radon Fourier Transform,RFT)方法有明显改善。
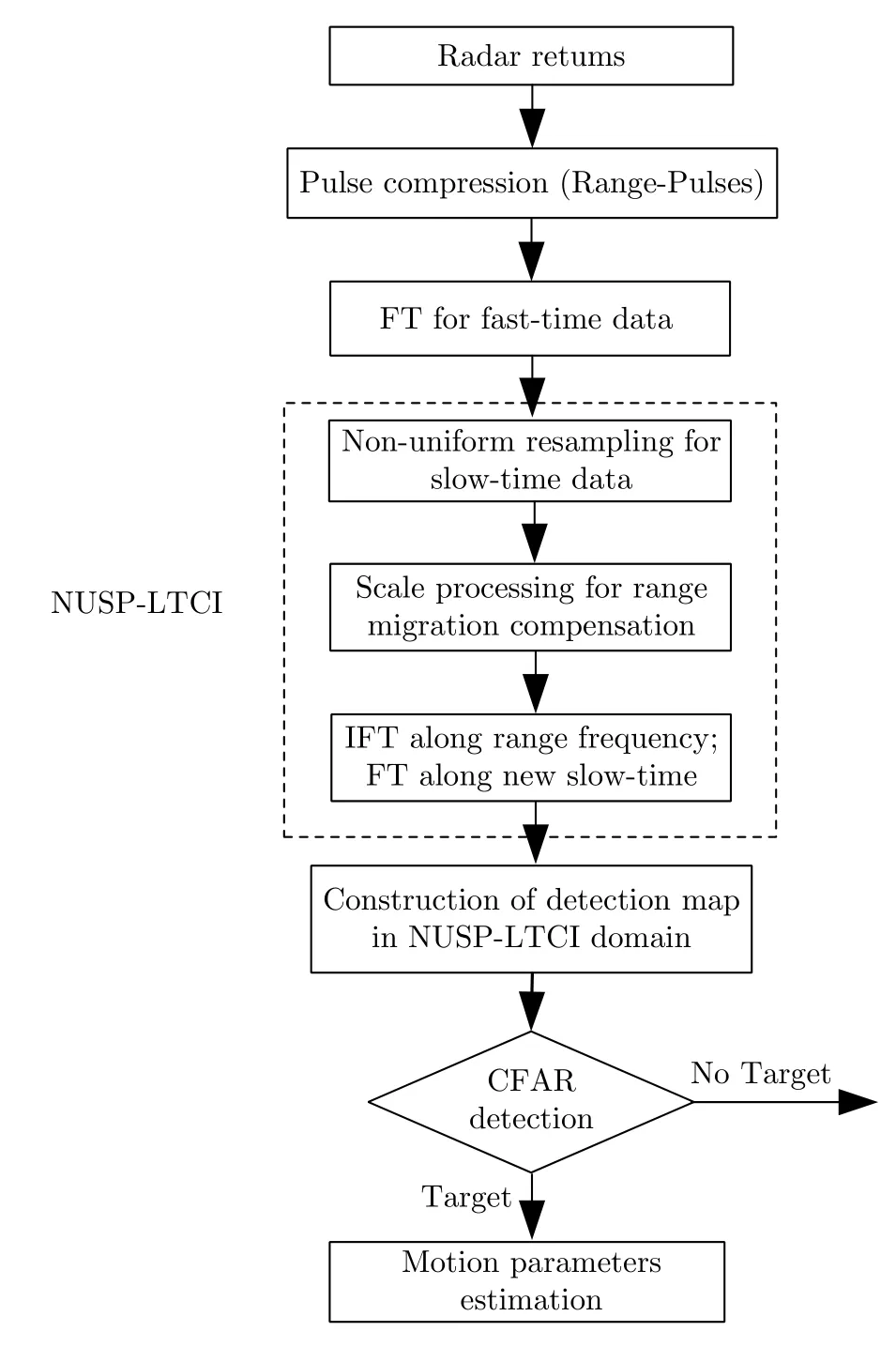
图20 非参数搜索长时间相参积累(NUSP-LTCI)处理流程[58]Fig.20 NUSP-LTCI processing[58]
非均匀采样降阶运算定义为[59]

非均匀采样降阶运算不同于传统的相位差分运算,在不进行信号的延迟复共轭相乘逐次降阶的前提下,能够快速将N阶相位降阶至N/2或N/2+1阶,从而大大降低了运算量,并减少了交叉项的影响。而变标尺度变换,借鉴Keystone变换的思想,对时间坐标轴进行尺度变换,消除变量之间的线性耦合关系,可在目标速度未知的前提下实现距离徙动校正。
沿距离向对脉压后的雷达数据进行傅里叶变换,得到距离频率-脉间慢时间二维数据

则通过非均匀采样运算,式(9)可转变为

由式(10)可知,机动目标回波相位已由关于tm的3阶多项式,降阶为关于新的时间变量τm的1次项。因此,后续可采用变标尺度变换去除距离频率f和τm的线性耦合关系,进而实现距离和多普勒的徙动补偿。
(3) 分布式多视角微动特征提取技术。由于无人机运动目标姿态变化的复杂性,在不同的雷达视角下,其微多普勒特征将呈现显著差异,因此,利用分布式多视角雷达探测可提取更加全面的微多普勒特征,从而对目标实现更好的分类[61—63]。以外辐射源雷达为例,外辐射源雷达通常利用数字广播电视信号作为照射源,其工作频率较低,在目标精细化特征尤其是微动特征描述方面优势并不突出,但外辐射源雷达一个重要优势在于能利用分布式发射站以同时获得不同视角上的微动分量,从而提高微动特征分辨率[64,65]。图22给出了单频网分布式外辐射源雷达微动特征提取的方案流程,利用单频网分布式外辐射源雷达的多视角特性,分析波数域样本分布与微动特征分辨率之间的内在联系,设计接收站位置优化策略以提高目标微动特征分辨率。
对于外辐射源雷达双基地探测,若基线中点位于空间固定坐标系(X,Y,Z)的原点O,双基地角为β,方位角为δ(定义为双基地角平分线与旋转平面的夹角)。不失一般性,假设旋转叶片在水平面内转动,叶片数为K,叶片长度为L,转动速率为Ω,若不考虑目标主体运动及多径杂波的影响,则接收到的理想旋转叶片回波信号可表示为

其中,A为散射信号强度,函数Φk(t)为

其中,λ为波长,φkφ0+k2π/K,k0,1,2,···,K −1为各叶片对应的初始旋转角。
旋转叶片时域特征由式(11)的幅度决定,即

可见,时域特征是由sinc函数组成的,由sinc函数的定义可知,连续两个峰值位置之间的时间间隔为

对式(11)作傅里叶变换,得到其频谱为
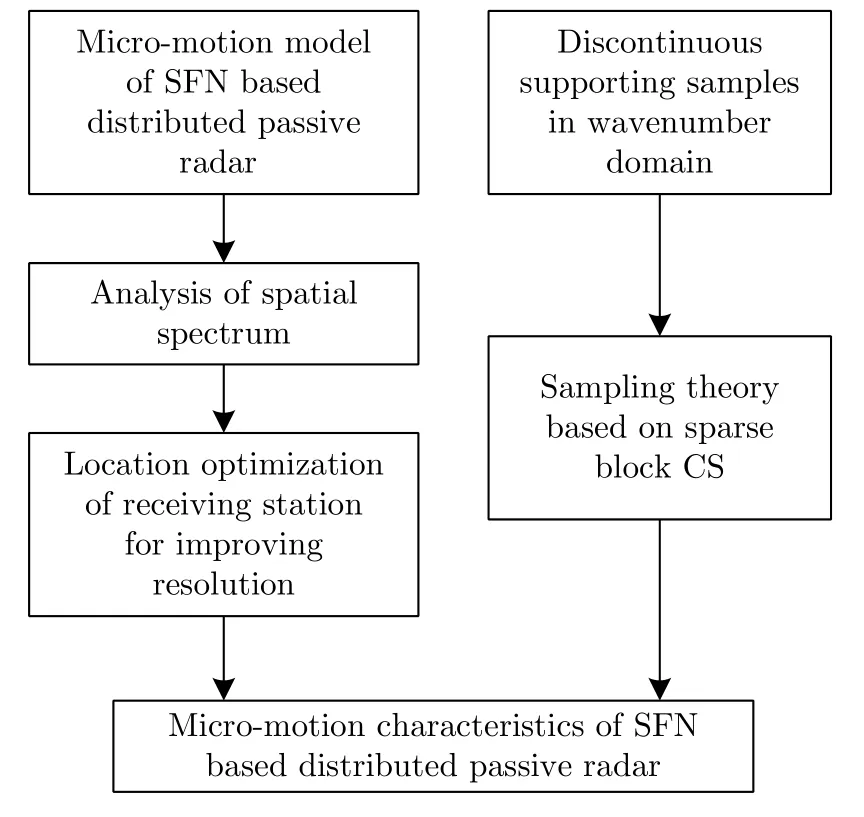
图22 单频网分布式外辐射源雷达微动特征提取研究思路Fig.22 Method of micro-motion feature extraction via single-frequency distributed passive radar

可见,调制谱是由一系列谱线间隔为∆fKΩ/2π的谱线组成的,Cm为谱线幅度,由Bessel函数确定,式(15)中M为调制谱的谱线条数,由式(16)确定

由此可得调制信号带宽为

其中,VtipL·Ω为叶尖速度。
因此,在不同视角条件下,可得到不同的雷达微多普勒回波,对多视角微多普勒特征提取并融合,则可更有益于目标识别与分类。
3.2 飞鸟与无人机目标自动识别方法
近年来,飞鸟与无人机目标自动识别得到了广泛关注,其主要技术思路与雷达目标识别有相似之处,主要方法包括基于模板的识别方法[66]和基于模型的识别方法[67],前者的主要工作集中在特征库构建方面,同类目标的特征可以聚类在一起,而不同类的特征在特征空间中是可分离的,通过精心选择目标的特征,可以有效的对目标进行分类和识别;后者在于目标的物理模型构建,包括其外形,几何结构,纹理,材质等。这两种方法都需要有深厚的领域知识来构建特征库,或者需要特定的模型知识构建模型库,并且特征库和模型库的好坏直接影响识别结果。目前,较为常用的飞鸟和无人机分类流程为,首先检测目标,然后通过信号处理方法提取飞鸟和无人机的特征[42,68—70],包括RCS特征、高分辨距离像特征、变换谱特征、时频特征、极化特征等,进而利用特征差异,采用支持向量机(Support Vector Machine,SVM)等方法实现两者的分类和识别。区别于上述方法,本文对目前的两种新兴方法进行阐述。
(1) 基于机器学习或深度学习的目标识别方法。深度学习方法是一种高效的智能处理方法,相比于传统的SVM更适合挖掘更高维度的抽象特征,具有良好的泛化能力,并且在雷达领域开始得到应用[71]。深度神经网络方法可从实测数据中习得目标的各种隐藏特征,无需构造复杂的高逼真度模型,因此在高分辨距离像、微多普勒谱图和距离多普勒谱图等识别中有非常好的应用前景[72,73]。由于飞鸟和无人机的时频微动图有明显差异,将其作为数据集采用深度卷积网络(Convolutional Neural Network,CNN)学习,有望实现目标微动信号的智能化提取和识别[74,75]。目前,该方向处于起步研究阶段,卷积网络的构建、参数设置以及数据集的构造等均需进一步研究。
无人机旋翼和飞鸟的微动特征参数与无人机和飞鸟类型、运动状态、雷达观测方式、环境和背景均有密切的关系,试图从数学建模和特性认知的角度去寻找参数之间的关系,并基于特征差异开展目标识别,是一种可行的技术途径,但复杂的运动形式和环境因素,其内在的关系有时难以用模型和参数的方式描述清楚。并且作为关键步骤的特征提取过程则需要占据相当的系统资源,且特征多为人工设计,从而造成很难获得目标数据深层本质特征。为了解决雷达目标识别中特征提取面临的问题,获取目标深层本质特征信息,提高识别精度,可采用深度学习方法,如深度神经网络、卷积神经网络、深度置信网络和递归神经网络,用于特征描述、提取和识别,通过设置不同的隐藏层数和迭代次数,获取数据各层次的特征表达,然后和近邻方法相结合,对目标进行识别[72,73,76]。可采取的思路是:
(a)通过深度学习构建可用于无人机和飞鸟运动模型的参数估计的深度神经网络结构,取得优于传统参数模型建模方法和时频参数估计的效果;
(b)通过卷积神经网络结构,实现回波信号(如微动信号)的深度特征提取和场景精细化识别;
(c)通过对大量特征数据集的认知学习,利用深度学习方法构建深度网络结构进行回归分析来反演运动形式,并以此分析运动特性与运动参数之间的关联。
对于微动参数估计,由于微动回波信号可以看做是时间-频率的二维特征数据,可采用卷积神经网络(CNN),将微动目标回波信号作为输入数据,经过多层卷积神经网络,获得微动模型关键运动参数,再将参数代入微动模型,作为代价函数反馈,进行反向传播,调整权重,重新输入微动目标回波数据训练计算,拟合程度越高,证明数据越符合该微动模型,一直到获得参数较为理想为止,并估算出微动模型的参数,最后计算微动模型与实际信号的误差。图23给出了微动时频图CNN中各卷积层的数据特征(以LeNet为例)[73],其中,图23(a)和图23(c)分别为CNN的第1个卷积层和第2个卷积层的卷积核,图23(b)和图23(d)分别为第1个卷积层和第2个卷积层的特征图,可以看出,CNN能够提取出数据集中较为精细的纹理和轮廓特征,从而为特征分类和参数估计奠定了基础。
对于典型的旋转目标来说,主要估计的就是旋翼转速ω,需要找到一个合适的参数ω使得微动模型与回波数据拟合,拟合程度越高,证明模型越符合数据。首先需要将杂波数据作为输入,进入神经元运算,进行卷积运算、池化,进行全连接,经过多层的CNN网络层,最后通过Softmax层得到两个输出,得到一个值向量,根据取值范围的设定,选定此次训练后应选取的参数值,代入到原模型中作为代价函数,反向传播,调整权重,重新训练,计算数值结果是否拟合于此参数的模型。如相差较大则继续训练,直到得到的参数值较为符合训练数据。由图23可知,一个CNN由若干卷积层、Pooling层、全连接层组成。可以根据不同的分布模型,构建各种不同的卷积神经网络来完成此次任务。基于深度学习的微动参数估计流程初步设计如图24所示。对信号进行特征描述时通过构造深层的卷积神经网络,获取中间层网络,尤其是靠近全连接层的卷积层网络输出作为学习获取的特征描述。
(2) 基于无人机与飞鸟目标运动轨迹差异的识别方法。无人机目标的飞行轨迹相对稳定,而鸟类的飞行轨迹较为多变、机动性高,因此利用两者运动方式的差异,采用基于运动模型的低空非合作无人机与飞鸟目标轨迹差异特征提取,能够为两者的分类和识别提供新的技术途径[77]。因此,可以通过长时间的探鸟雷达数据积累,对一定周期内的鸟类飞行轨迹数量、飞行高度、飞行方向等数据进行统计分析,结合探测区域鸟情人工调研结果,掌握周边留鸟的活动节律及过境候鸟的相关迁徙情况[78]。

图23 CNN中各卷积层的数据特征(以LeNet为例)[73]Fig.23 Data characteristics of convolutional layers in CNN (take LeNet as an example)[73]
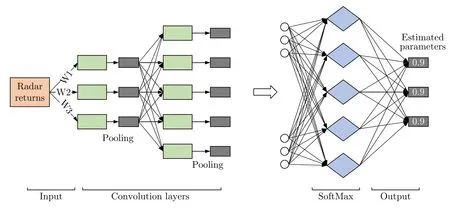
图24 基于深度学习的微动参数估计流程示意图Fig.24 Schematic diagram of m-D parameter estimation based on deep learning
(a)基于多模型概率提取的目标运动模式判别与分类。除提取“信号”层面的目标微动特征之外,利用“数据”层面的目标飞行轨迹特征,同样是区分飞鸟和无人机目标的有效技术途径。通常情况下,无人机目标的飞行轨迹持续时间长且相对稳定,而飞鸟目标的飞行轨迹相对较短且灵活多变,可通过评估“数据”层面目标运动模型的变化情况区分飞鸟和无人机。图25所示的算法通过提取出目标的运动模型转换频率特征,进而区分轻小型无人机目标与飞鸟目标。
图26所示为利用飞行轨迹特征对飞鸟与无人机目标进行识别的结果,雷达实测数据中包含了一段时间内某机场净空区自然活动的若干飞鸟目标与一架大疆精灵3无人机测试目标。其中,飞鸟目标多为本地留鸟,机动性高且飞行轨迹短。在工程应用中,无人机和飞鸟目标的分类阈值需要通过人工标记的方法进行验证和设定,确保算法的识别效果。实际上,无人机的飞行轨迹也可能设计为机动且复杂多变,因此,该算法的适用范围有待于进一步研究和验证。
(b)鸟类活动节律分析。利用探鸟雷达获取的机场鸟情数据,对不同时段的鸟类飞行轨迹数量进行统计,确定鸟类活动的高峰时段;在机场探鸟雷达的监视范围内划分网格,统计高峰时段内鸟类活动的网格分布情况,确定鸟类活动的主要区域,结合机场鸟情调研情况,为机场留鸟活动节律分析提供数据支撑。图27和表2给出了某机场鸟类活动热点分布情况[79],共统计出10个鸟类活动的热点区域,每个区域记录的月度轨迹数量和百分比见表2。其中,热点区域10的面积最大,鸟类活动最活跃,其高峰时段出现在清晨和傍晚,因此,其属于鸟类栖息地的可能性最大。其余9个热点分布在飞行区内及机场周边区域,面积较小,高峰时段出现在白天,属于鸟类觅食或饮水地的可能性更大。机场管理机构可以结合机场实地鸟情调研情况验证以上猜测,对相关区域开展生态治理,降低鸟击风险。
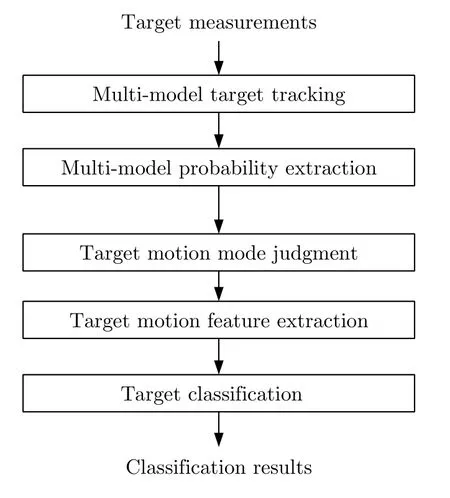
图25 基于雷达数据的飞鸟与无人机目标识别算法流程Fig.25 Target recognition algorithm of flying birds and UAVs based on radar data processing

图26 飞鸟与无人机目标飞行轨迹识别结果[77]Fig.26 Recognition results of trajectories of flying birds and UAVs[77]
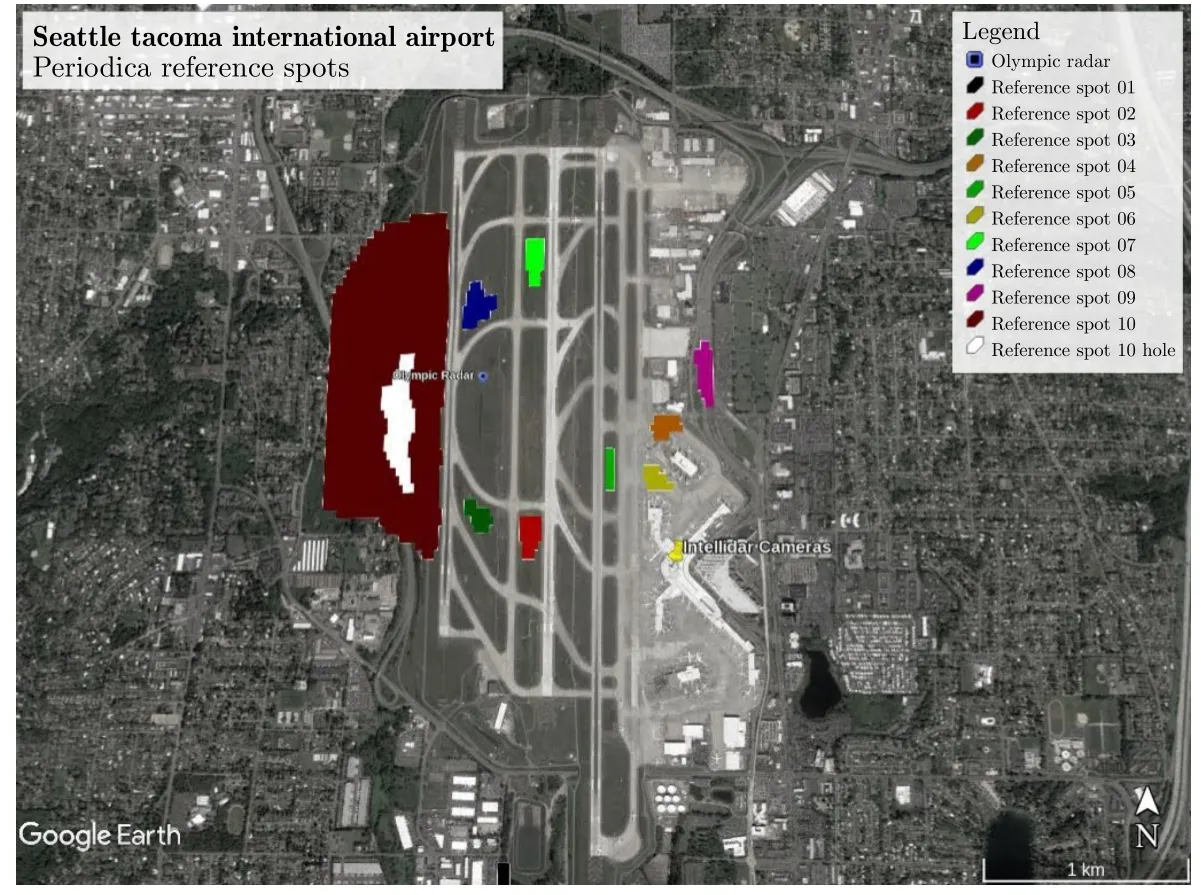
图27 某机场鸟类活动热点统计情况[79]Fig.27 Statistics of hot spots of birds activity at an airport[79]
2017—2018年,受民航局机场司委托,作者团队对当前国内成熟的轻小型无人机目标监管技术进行了持续跟踪调研,调研发现,目前国内研制的基于雷达技术的非合作无人机探测系统大多基于已有的军事雷达或其他用途探测雷达的改进版,在探测和识别能力上与国际相比有很大欠缺,少量系统虽开发了识别功能模块,但识别途径和方法有限,多依赖于回波幅度和信号起伏变化,误报率极高,经常发生将飞鸟误识别为无人机的情况。基于传统特征信息的雷达目标识别,特别是非合作目标识别变得困难甚至失效。基于研发的“机场雷达探鸟实验系统”,初步验证了变换域动目标检测技术、长时积累技术以及运动模式差异分类技术,如图28所示,获得了国家重点研发计划、国家自然科学基金民航联合研究基金、山东省重点研发计划、民航科技项目等多项课题的资助。2019年,民航局委托航科院启动了《机场净空区无人机探测技术标准》与《机场探鸟雷达系统技术标准》两项行业标准的制定工作,将从标准层面规范飞鸟与非合作无人机目标的探测、识别与技术验证。
4 现有研究存在的不足
由上述研究现状可知目前实现飞鸟与无人机目标的分类和识别的主要途径有:一是,采用长时间凝视观测或泛探观测模式,进而提高目标的多普勒分辨率;二是,利用无人机和飞鸟微动特征及差异是实现分类和识别的有效手段;三是,通过双多基地雷达的观测,雷达的多视角特性可以克服单基雷达姿态敏感性的局限及遮挡效应的影响,形成多视角资源互补,有助于提高分辨能力和特征提取精度;四是,采用深度学习智能分类和识别方法,将目标的距离多普勒图以及时频图作为图片进行学习,通过深度卷积网络,对目标特征进行深度挖掘,实现精细化描述。目前该方向存在的主要问题和难点是:

表2 鸟类热点月度轨迹数量统计Tab.2 Monthly statistics of bird hot spots
(1) 无人机与飞鸟目标建模及特性研究方面。理想状态下,目标典型微动的特征与其微动频率、微动幅度,径向距离和观测角度等因素相关,其随时间的变化规律表现为正弦调频(Sinusoidal Frequency Modulation,SFM)信号形式,因此在时频图像中也呈现出正弦变化规律。事实上,微动过程中散射中心位置、强度的变化还会对回波幅度进行非线性调制,因此在实际应用中还需要考虑目标姿态变化、目标形状、回波不连续、遮挡效应等因素的影响[80,81]。另外,雷达发射信号参数也会对微多普勒频率的观测造成影响。此外,目标或目标部件还复合有多种微动形式,如鸟类目标等。目标的微多普勒不再服从简单的正弦规律,而是表现为多个正弦分量的叠加。微动回波模型显得更为复杂,也提升了后续特征提取的复杂度。
(2) 无人机与飞鸟目标特征差异提取方面。对无人机和飞鸟的差异特征提取是后续分类和识别的基础和关键,两者是典型的低可观测目标,对其回波信号的预处理的好坏直接决定了特征描述的精细化程度。无人机目标类型多,具有不同的尺寸、形状及运动特性,其雷达散射特性和多普勒特性也不尽相同。外辐射源雷达能通过长时间相干积累可提高多普勒分辨力,但其工作频率较低,在目标精细化特征尤其是微动特征描述方面优势并不突出,在复杂环境下实现高分辨的微动特征提取技术有待于进一步研究。此外,除提取“信号”层面的目标微动特征之外,利用“数据”层面的目标飞行轨迹特征,同样是区分飞鸟和无人机目标的有效技术途径。通常情况下,无人机目标的飞行轨迹持续时间长且相对稳定,而飞鸟目标的飞行轨迹相对较短且灵活多变,可以通过评估“数据”层面目标运动模型的变化情况探索飞鸟和无人机目标的分类识别方法。如何建立科学有效的飞行运动模型,并提出运动模式的判别准则和方法,这些都需要深入研究。

图28 无人机和飞鸟目标外场探测试验Fig.28 UAV and flying birds detection experiment
(3) 无人机与飞鸟智能分类识别方面。目前的CNN模型发展迅速,适用于各种应用的改进算法层出不穷,将CNN用于无人机和飞鸟目标的分类识别前提是构建不同类型的数据集,数据集的类型完备性和标注准确性直接决定CNN网络学习的效果,因此仍需长时间开展不同条件下、不同目标的数据采集和标注。此外,如何将特征数据重构以适应深度学习模型输入层、如何结合目标识别实际需求进行模型参数调优、如何利用输出的差异特征进行场景辨识和目标识别方法设计,也是迫切需要解决的关键科学问题。
5 发展趋势
(1) 雷达回波信号的精细化处理是提高检测和识别性能的前提。以往的雷达目标探测技术研究,通常是只针对雷达回波数据,仅利用目标和背景的1阶和2阶统计分布特征、谱特征、空间相关特征以及目标匀速、匀加速运动特征,在事先假定的信号模型、目标模型、背景模型条件下开展检测、跟踪与识别算法设计。这种粗放型的做法能够解决雷达探测中的大多数问题,但是随着环境和目标的日益复杂,这种粗放型的做法日益明显地阻碍了雷达探测性能的进一步提升[82]。必须从雷达探测所面对的目标和背景,从雷达探测所包含的杂波干扰抑制、检测、跟踪和识别等环节中进行精细化的分析与处理,提高信息的利用率,进而获得雷达探测性能的改善[6]。
(2) 信号和数据特征融合是提高分类正确率的有效途径。目标分类和识别最重要的前提是差异特征构建和提取。外辐射源雷达长时间的观测模式易于提取高分辨的微动特征,能够获取无人机和飞鸟的精细信号特征,旋翼无人机和飞鸟目标的微动特征有明显差异,这为分类和识别奠定了基础。此外,大量的实验数据表明,雷达获取的目标数据中,无人机与飞鸟的运动轨迹具有一定的区分度。目前,成熟的目标跟踪算法通过建立多种运动模型逼近目标的真实运动状态,运动轨迹相对稳定的无人机目标在飞行过程的目标状态一般符合单一的运动模型,而机动性较高的飞鸟目标在飞行过程中的目标状态通常在多个运动模型直接切换。同时,大量的探鸟雷达数据分析表明,一定区域内的鸟类活动具有明显的节律性。由此可知,通过评估目标运动模型切换频率结合鸟类活动节律分析的方法进行目标识别分类是可行的。因此,融合利用无人机和飞鸟的信号和数据特征,能够扩展差异特征空间,提高分类概率[77]。
(3) 深度学习网络为无人机和飞鸟目标智能识别提供了新的手段。由于无人机和飞鸟复杂的运动形式和环境因素,其本质属性有时难以用模型和参数的方式描述清楚,从而造成很难获得目标数据深层本质特征。采用深度学习等智能学习的思路,通过构建多层卷积神经网络,发现高维数据中的复杂结构,已在图像识别和语音识别等领域经过验证具有很强的特征表述能力和较高的分类识别准确率。深度学习的好处是用非监督式或半监督式的特征学习和分层特征提取高效算法来替代手工获取特征。由于目标微动信号可以看做是时间-频率的二维特征数据,目标回波和运动轨迹体现在雷达P显画面也是距离和方位(多普勒)的二维图像[76,83],因此,采用深度学习来进行目标智能分类和识别是非常适合的。此外,仅用时频图得到的微动特征对无人机和飞鸟信号进行分类时利用的特征空间有限,准确率较低,为此,可采用多特征多通道CNN融合处理的思路,将目标的回波序列图、微动时频图、距离-多普勒图、变换域图、运动轨迹图等输入多通道CNN,从而更好地运用卷积神经网络来进行特征学习和目标辨识[76]。
(4) 新体制雷达为目标精细化处理和探测识别一体化奠定了硬件基础。当前,雷达硬件技术,特别是硬件的计算能力和存储能力的进步为雷达目标探测精细化、智能化信息处理技术的发展提供了坚实的硬件基础;同时,数字阵列体制、外辐射源雷达、全息雷达、MIMO雷达、软件化雷达、智能化雷达等新的雷达体制,扩展了可利用的信号维度,为雷达目标探测精细化、探测识别一体化处理提供了灵活的软件框架[84]。例如,全息数字阵雷达、MIMO雷达等具有多波束凝视和泛探能力的雷达,能够实现时域(跨距离、跨波束、跨多普勒的长时间相参积累)、空域(宽空域全数字波束形成全覆盖)和频域(长时间凝视改善多普勒分辨力,提取精细化运动特征)信息的联合处理,从而实现“低慢小”等低可观测目标的可靠检测和识别[85—88]。外辐射源雷达利用第三方辐射源,本身不发射信号,无需专门申请频率,具有成本低、绿色环保、无电磁污染的特点,在机场等电磁频谱敏感区域的无人机监视尤具有独特优势。此外,复杂环境下,依靠雷达单一探测设备的目标识别概率都不高,需要综合利用不同传感器的信息,如光电、声等,弥补单一传感器的局限性,提高识别效率与精度。
6 结束语
本文对近年来复杂场景下飞鸟与无人机目标检测和识别这一热点研究领域的主要技术手段和系统进行了梳理和总结,分析了各自的优缺点,给出了数据仿真分析结果,并从信号精细化处理、信号和数据特征融合、深度学习智能识别以及新体制雷达发展等几个方面,对未来实现有效监视和识别飞鸟和无人机目标进行了展望。由于飞鸟和无人机目标均属于“低慢小”目标,回波具有低可观测性,并且隐藏在复杂背景中,因此,对两者的有效监视和识别也极大考验和促进雷达新技术的发展和应用,相关技术也能够为其它复杂背景下的弱小目标探测提供思路。期望更多的学者能够对此领域进行深入研究,寻找更好地提高飞鸟和无人机目标探测和识别能力的方法和手段。
