一种基于误差反向传播优化的多通道SAR相位误差估计方法
2020-10-24仇晓兰郭嘉逸温雪娇杨俊莹
崔 磊 仇晓兰 郭嘉逸 温雪娇 杨俊莹 付 琨
①(中国科学院电子学研究所苏州研究院 苏州 215123)
②(中国科学院空天信息创新研究院 北京 100190)
③(微波成像技术国家级重点实验室 北京 100190)
1 引言
合成孔径雷达(Synthetic Aperture Radar,SAR)是一种高分辨率的成像雷达,在海洋、减灾及国防等领域具有重要作用。提升SAR的图像分辨率和测绘带宽度,可以同时获得更多更精细的场景信息。但传统单通道SAR存在分辨率和测绘带宽的固有矛盾,无法同时获得高方位分辨率和宽测绘带的SAR图像[1]。
近年来提出了方位多通道SAR体制来实现高分辨率宽幅。方位多通道SAR技术的工作原理为:将天线方位向分成多个子孔径,一个孔径作为发射通道,所有孔径同时接收回波,可以用较小的脉冲重复频率(Pulse Repetition Frequency,PRF)发射信号以获得宽测绘带,各通道回波在方位向合成,合成后信号的等效PRF提高为原来的M倍(M为接收通道数),从而扩大多普勒频谱的不模糊范围,因此可同时实现高分辨率与宽测绘带成像。
方位多通道SAR由于受平台姿态、天线位置和指向、通道硬件、设备噪声等因素影响,不同通道的增益和相位很难完全一致,若不进行估计与补偿,合成后的等效单通道信号会在方位向出现周期性的幅度和相位误差,导致成像后出现方位重影,或称虚假目标。因此通常需要进行通道间幅相误差估计。由于幅度误差通常可以采用通道幅度均衡来补偿[2–4]并得到较好的效果,相位误差估计是多通道SAR信号处理的难点。已有很多研究提出了许多有效的方法,主要分为3类:第1类:利用回波相关性的方法[5–8],包括时域相关法、频域相关法,这类方法原理简单直接,但会一定程度受到中心频率估计精度的影响[9–11];第2类:基于子空间的方法,包括正交子空间法[12–15]、信号子空间比较法[16]、天线方向图法[17]等,这类方法估计精度较高,但需要有关于信号模糊数的先验知识,并且通道数相对于模糊数有较大余量时估计性能好,如余量不够,估计性能将显著下降;第3类:基于迭代最优化的方法[18,19],包括自适应最小二乘法、最小熵法等,该类方法通常流程较为复杂、计算量较大。
本文提出了一种基于误差反向传播优化的多通道SAR相位误差估计方法,其从原理上讲是属于前述的第3类方法,但本文采用了深度学习中常用的误差反向传播方法,来实现通道间相位误差和目标散射系数的优化,最终获得通道间相位误差的估计值,同时也得到了对稀疏目标散射系数的估计。仿真验证表明,本文算法具有较好的鲁棒性,在较低信噪比情况下仍具有较高的估计性能。
本文后续内容结构安排如下:第2节简要介绍了多通道SAR信号模型,为误差估计奠定模型基础;第3节给出本文估计方法和实现流程;第4节利用仿真实验验证算法有效性;第5节总结全文。
2 方位多通道SAR信号模型
2.1 成像构型
假定方位多通道SAR系统共有M个接收通道并沿航向分布,如图1所示。SAR平台速度为vm,平台到观测场景中心的最近斜距为R0,由整个天线的相位中心Tx发射脉冲,M个通道相位中心Rx1~RxM同时接收场景回波,假设整个天线的长度为La,由于子孔径均匀分布,相邻接收天线孔径之间的相位中心间隔为dLa/M,等效相位中心的间隔为dLa/2M。设y轴沿着平台速度方向,z轴指向天空方向,x轴垂直于y轴和z轴组成的平面,构成右手坐标系。wg为测绘带宽。
2.2 回波模型
第m个接收通道接收到的回波可表达为

图1 方位多通道SAR系统对地观测成像构型示意图Fig.1 Ground observation imaging configuration of azimuth multi-channel SAR system

其中τ,η分别表示距离快时间和方位慢时间,σ(x,y)为坐标(x,y)处目标的复散射系数,g(η)为天线方向图加权系数,kr是距离向调频斜率,c是光速,λ是工作波长,rT(x,y,τ,η)和rm(x,y,τ,η)分别为发射通道与第m个接收通道与场景坐标(x,y)间的斜距。
将分布在x,y平面的目标按照先延x轴,再延y轴增大的顺序进行编号,σ(x,y)具有幅度和相位特性,那么场景中的第i个目标散射系数可以写成W(i)ejθi,令

假设通道间第m个通道的幅相误差为,那么第m个接收通道接收到的回波信号可以表示为

设场景中共有N个目标,M个通道,方位向采样点数是Na,方位向采样时间点是k,采样间隔是∆t,则ηk·∆t,距离向采样点数为Nr,采样间隔为 ∆τ,距离向采样(点是j,则τj·∆τ,令)
根据回波产生的物理过程,可以将回波写成表达式为

其中Y是多通道SAR获得的观测样本(也即回波采样值),按一定顺序重排后的一维向量;dot是矩阵之间的点乘;A矩阵表示初始回波矩阵;B矩阵表示含有通道幅度和相位误差待估计参数的观测矩阵;P矩阵为在成像区域划分网格后,由每个网格散射系数组成的矩阵,设网格时,网格待估计目标数为X,要求X >N;n是一个与Y相同维度的噪声矩阵。下面详细解释各个矩阵。
Y是不同距离向采样时刻y(1)到y(Nr)组成的矩阵

其中y(j)矩阵是同一距离向采样时刻所有方位向上M个通道的观测样本回波的矩阵

A是 不同距离向采样时刻ψ(1)到ψ(Nr)组成的矩阵

其中ψ(j)矩阵是同一距离向采样时刻所有方位向上M个通道无幅相误差、无后向散射系数加权的回波初值,ψ(j)矩阵可以表示为

P矩阵是待估计网格的后向散射系数的矩阵
B是和A同维度的幅相误差矩阵

其中ϑ是和ψ(j)同维度的矩阵

其中,A矩阵是式(5)的输入,Y矩阵是输出。P矩阵中的X个W(i)ejθi以及B矩阵中M个Amejϕm是式(5)方程中待估计的参数。
3 通道间相位误差估计方法
3.1 估计方法
反向传播法是深度学习中的一种常用方法,反向传播是“误差反向传播”的简称,是一种与最优化方法(如梯度下降法)结合使用的,用来训练人工神经网络的常见方法。该方法对网络中所有权重计算损失函数的梯度。这个梯度会反馈给最优化方法,用来更新权值以最小化损失函数。在本文中可以更新的权值是B和P矩阵。
由于通道间幅相误差Amejϕm的个数只有通道个数M个,因此在设置B矩阵时,只设置M个变量,然后进行扩展,扩展到B的维度。
使用反向传播的目标是找到一个能把一组输入最好地映射到其期望的输出的函数。在本文中输入是A矩阵,输出是Y矩阵。反向传播算法主要由3个阶段组成:激励传播、权重更新以及多次迭代。
第1阶段:激励传播。首先进行前向传播,将A矩阵输入初始化的B,P矩阵,获得激励响应;其次进行反向传播,将激励产生的响应对应的目标输出Y进行求差操作,从而获得响应的误差。在本算法中,使用均方误差进行求差,均方误差公式如式(13)所示

第2阶段:权重更新。对于每个权重,即B,P矩阵,按照以下步骤进行更新。首先将输入激励和响应误差相乘,从而获得权重的梯度;其次,将这个梯度乘上一个比例并取反后加到权重上,这个比例类似于深度学习中经常使用的学习率,取反的目的是梯度是“上升”最快的方向,得到激励产生的响应对应的目标输出之差下降最快的方向,需要求梯度相反的方向。
第3阶段:多次迭代。第1和第2阶段可以反复循环迭代,直到输入的响应达到满意的预定目标范围为止。通过以上迭代计算,可以在稀疏的条件下对后向散射系数矩阵P进行估计,同时可以估计出方位多通道之间的幅相误差矩阵B。在B矩阵中的M个Amejϕm就是所求得的幅相误差。
3.2 算法实现
本文提出的方位多通道SAR系统相位偏差估计算法主要包括数据抽取、构建输入输出矩阵、初始化待估计矩阵、设置学习率、迭代次数以及损失函数和迭代计算提取通道间相位误差等5个步骤,如图2所示。下面对各处理步骤进行介绍:

图2 基于反向传播优化的多通道SAR相位误差估计算法流程图Fig.2 Flow chart of channel phase error estimation method based on backpropagation algorithm for multichannel SAR
步骤1 数据抽取。由于A矩阵和Y矩阵数据量较大,估计通道误差时具有对计算机性能要求高,求解过程耗时长等问题。针对以上问题,对A矩阵和回波数据在距离向和方位向进行数据抽取,减少数据量。
步骤2 构建输入输出矩阵。根据场景构建输入矩阵A,A矩阵的列数是在场景中待估计的目标个数X,设置待估计目标个数X的值以及待估计目标的位置,要求待估计目标设置的位置能够覆盖场景中的真实目标,设置待估计网格时,可以按照期望分辨率划分网格,这样真实目标的个数相对于待估计目标的个数是稀疏的,同时待估计网格可以覆盖场景目标。根据回波数据构建输出矩阵Y,将回波数据按照式(6)进行排列,得到Y矩阵。
步骤3 初始化待估计矩阵。初始化B矩阵时,由于通道间幅度误差通过传统方法,例如时域相关法,可以得到比较准确的估计,因此对B矩阵中Amejϕm的幅度误差在初始化时,将通道间幅度误差Am进行补偿设置,将其初值设置为已经估计出的幅度误差,相位误差初值均设置为0。对P矩阵初始化时可以设置为全0矩阵。
步骤4 设置学习率、迭代次数以及损失函数。
步骤5 迭代计算提取通道间相位误差。得到幅相误差矩阵B后,通道间幅度误差在设置初值时已经进行了补偿,提取相位信息只要知道相位之间的差值,就可以对各个通道进行补偿,因此只需获取通道间相位误差梯度即可。同时得到散射系数矩阵P,在估计的过程中无目标的位置散射系数矩阵P中对应的幅度和相位是趋近于0的,有目标的位置散射系数矩阵P中对应的值接近于真实散射系数的值。
4 仿真验证
本节将利用仿真数据分析本文算法的通道间相位误差估计性能。仿真实验系统参数如表1所示。在方位向各个通道添加固定的幅相误差,利用本文算法对通道间相位误差进行估计。
由于该方法是在稀疏假设的条件下同时完成了相位估计和成像,在设置待估计网格时,需要满足网格待估计目标数为X大于真实目标数N的条件,如果在成像区按照期望分辨率划分网格,那么就能够覆盖场景目标,但计算量较大,本文为了验证算法性能并减小计算量,在覆盖目标的条件下降低了X的数量,如图3所示,在场景中设置9个目标用*号表示,在初始化A矩阵时设置X=100个地面网格,用o表示。
为了进一步减少计算量,首先对回波信号进行抽取。距离向抽取点数1024,方位向4通道各抽取256个点。如图4所示,整个方框代表回波信号,抽取中间部分信号进行估计。
由抽取后的回波构建Y矩阵,其维度是(256×4×1024)×1,根据抽取后的回波构建A矩阵,其维度是(256×4×1024)×100。
其次初始化待估计矩阵,B矩阵中Amejϕm的幅度误差在初始化时,将通道间幅度误差Am进行补偿设置,对相位误差均设置为0,B矩阵的维度和A矩阵相同,也是(256×4×1024)×100。对P矩阵初始化时可以设置为全0 矩阵,维度设置为100×1。
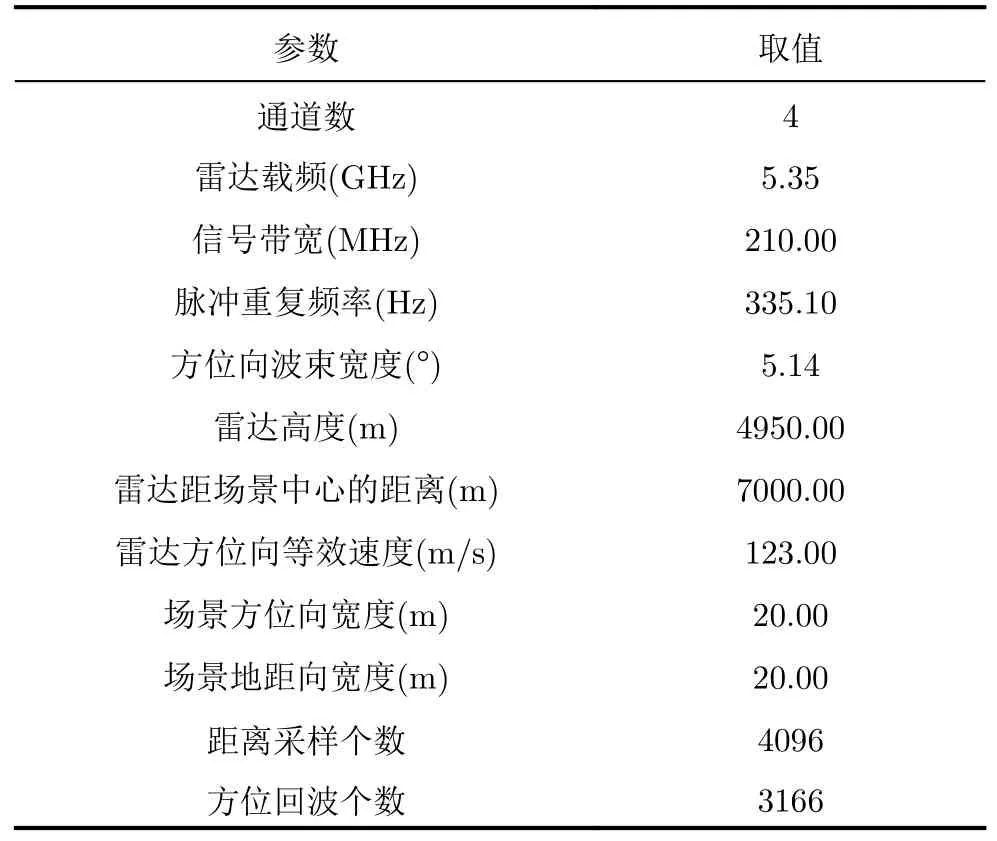
表1 仿真实验系统参数Tab.1 Parameters of simulation experiment system
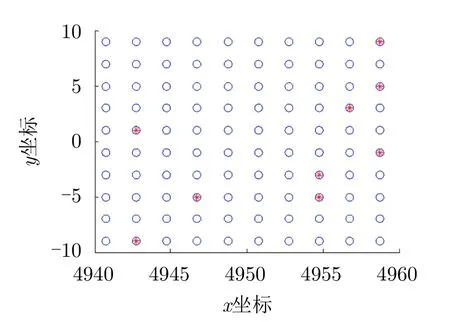
图3 场景目标示意图Fig.3 Scene target diagram
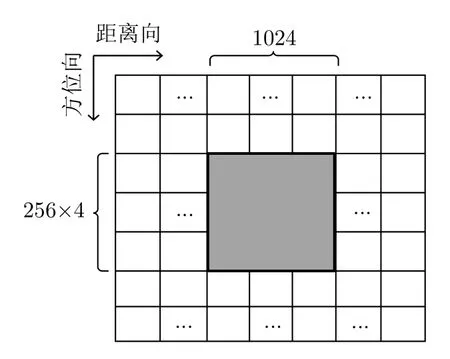
图4 回波抽取示意图Fig.4 Schematic diagram of echo data extraction
最后通过迭代计算,获取B矩阵中的ϕm值,由于设置了4个通道,求得∆ϕ1,2ϕ2−ϕ1,∆ϕ2,3ϕ3−ϕ2,∆ϕ3,4ϕ4−ϕ3。同时获取P矩阵中的第i个目标的后向散射系数W(i)ejθi。
4.1 无噪声下的仿真验证
在无噪声的条件下,对信号进行仿真,完成通道间相位误差估计,同时完成场景的散射系数估计,估计结果如图5所示。估计时间大约145 min。
4.2 含噪声下的仿真验证
在有噪声的条件下,对信号进行仿真,完成通道间相位误差估计,信噪比SNR=0 dB的估计结果如图6(a)所示,估计时间约147 min。信噪比SNR=–5 dB的估计结果如图7(a)所示,估计时间约144 min。
表2给出了通道间相位误差估计仿真实验结果。表2结果表明在无噪声和有一定噪声的条件下,本算法均可有效的估计出通道间相位误差。
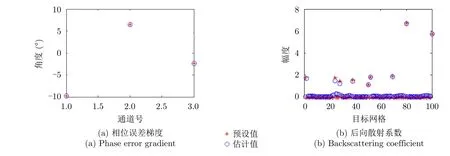
图5 无噪声估计结果Fig.5 Noiseless estimation results

图6 估计结果(SNR=0 dB)Fig.6 Estimation results (SNR=0 dB)

图7 估计结果(SNR=–5 dB)Fig.7 Estimation results (SNR=–5 dB)

表2 通道间相位误差估计结果(°)Tab.2 Estimation results of channel phase error (°)
如图5(b)、图6(b)、图7(b)所示,本算法在估计通道间相位误差的同时,在预设的待估计网格中得到了对目标散射系数的估计,估计出场景目标的位置和幅度。
5 结束语
针对方位向多通道合成孔径雷达通道间相位误差估计问题,本文基于反向误差传播训练优化的方法提出了一种迭代估计通道相位误差的方法。该方法构建含有通道间相位误差待估计参数的观测矩阵,输入初始化的SAR回波,通过通道间幅相误差矩阵和网格化待估计的场景目标矩阵加权,计算加权后的回波与多通道SAR实际回波之间的误差,通过反向误差传播的方法,不断训练优化待估计参数,最终获得通道间相位误差的估计值。利用本文算法,不但能完成通道间相位误差估计,同时还能完成对场景目标位置的估计,为多通道SAR误差估计提供了一种全新的思路。
