基于DSP28335的某型靶机飞控系统设计
2020-10-22王道波周凌子
汪 浩,王道波,周凌子,季 伟
(南京航空航天大学自动化学院,江苏 南京 210016)
0 引言
靶机属于军用无人机,用于在军事演习或军用武器试验中,模拟敌方飞行器,为导弹或火炮等提供空中打击目标。靶机上搭载自主飞行控制系统,在执行飞行任务时通常需要按指定航线自主飞行,依照期望的姿态与轨迹运动,同时能够下传飞行状态信息至地面系统[1]。此外,靶机还需要接收地面人员的操控指令,当靶机需要执行任务设备或者靶机状态异常时,地面人员能够及时进行操控。
在整个“人在回路”的闭环控制系统中,靶机飞控系统负责接收、执行指令,调整飞行状态,控制无人机各组件正常运行,接收各组件反馈,下传信息至地面测控系统。在实际飞行之前,需要对靶机进行仿真实验。在仿真实验中,将飞控计算机、舵机、电台等机载设备接入电路,由仿真计算机发送仿真数据至飞控计算机中,模拟实际飞行状况,验证飞控性能,同时可以检查靶机各组件的工作性能是否稳定[2]。
1 控制器设计
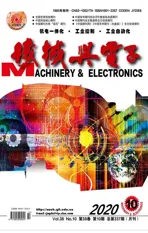
无人机飞行控制系统是保障无人机正常飞行与执行任务的核心系统,如图1所示。根据负反馈控制原理,飞控系统的控制回路可以划分为三级,分别为舵回路、增稳和制导回路[3]。舵回路是最内层的伺服控制回路,舵回路与姿态传感器等构成增稳回路,用于无人机飞行姿态的稳定与控制。舵回路、导航传感器与制导解算构成制导回路,完成飞行航迹控制。
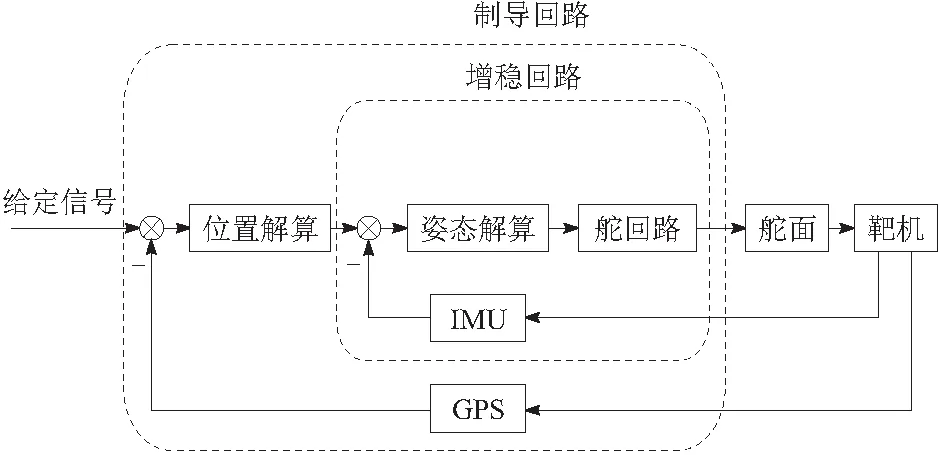
图1 靶机控制系统结构
无人机的运动可以分解到纵向方向与横向方向上,前者包含升降、俯仰与前后直飞,后者包括滚转、偏航与左右侧移,本文分别从这2个方面对靶机进行飞控设计[4]。
纵向运动的稳定与控制,主要在于对俯仰角的稳定与控制。通过操纵升降舵,一方面使得无人机在外部干扰下能保持期望运动状态,另一方面要能够响应控制指令。调整俯仰角度还可以改变无人机的飞行高度,因此俯仰姿态的控制是高度控制的内回路[5]。
1.1 纵向运动控制器
俯仰角控制回路如图2所示。对于俯仰角的控制策略,本文采用PI控制。引入俯仰角速率的反馈,用于增加阻尼力矩,抑制俯仰角的波动,改善系统动态性能。积分环节有利于增加系统型别,有效降低稳态误差,但系统相对稳定性会有所降低[6]。
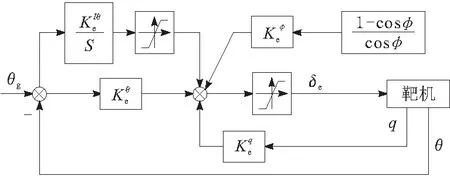
图2 俯仰角控制回路
为防止积分环节的升降舵出舵量过大,需要加入限幅。此外,靶机滚转时会引起高度降低,因此需要在俯仰角回路引入滚转角的反馈。俯仰角控制律为
(1)

高度控制如图3所示。采用PI控制作为高度控制律,俯仰角控制回路为内回路,同时引入高度变化率反馈信号,有利于增大系统阻尼。
图3 高度控制回路
高度控制律为
(2)

1.2 横侧向运动控制器
无人机的横侧向运动包含滚转运动与偏航运动,滚转角速度会引起偏航力矩,偏航角速度也会引起滚转力矩,因此横侧向运动本质上是一个多变量控制系统。
相对于方向舵,副翼对于滚转的操作性更强,该靶机采用副翼控制滚转运动。滚转角控制与俯仰角控制类似,控制结构如图4所示。
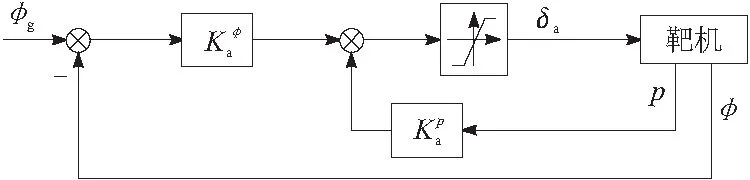
图4 滚转角控制回路
滚转角回路采用比例控制,引入滚转角速率反馈提高系统阻尼。
(3)

当需要改变无人机航向时,可以通过无人机滚转运动产生升力,升力在水平方向分量为无人机圆周运动向心力,从而改变飞机航向角。在转弯时应尽量减小侧滑角,使航向角调节过程平滑。航向角控制如图5所示。
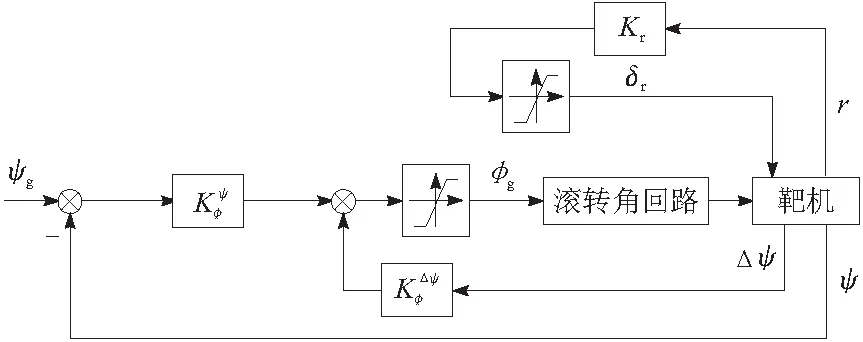
图5 航向角控制回路
(4)
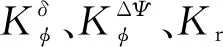
采用协调转弯方式进行侧向偏离控制器设计,通过操纵副翼舵完成侧向偏离控制。为增加阻尼,需要引入侧向偏离微分信号,而航向角信号与侧向偏离微分信号近似成比例关系,因此侧向偏离回路以航向角回路为内回路。侧向偏离控制回路如图6所示。
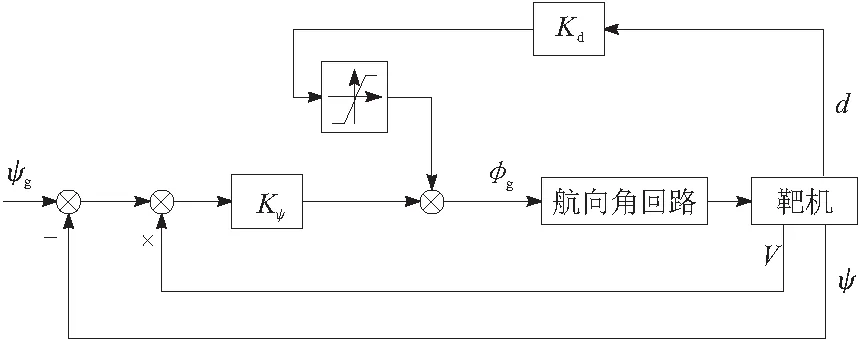
图6 侧向偏离控制回路
侧向偏离控制律为
φg=KΨ(Ψg-Ψ)V+Kdd
(5)
Ψg为航向角给定;Ψ为航向角反馈;V为靶机速度反馈;d为航偏距;KΨ和Kd为侧向偏离增益系数;φg为航向角回路输入量。
2 飞控系统组件
2.1 组件分析
如图7所示,从硬件层面考虑,靶机飞控系统有以下控制组件:飞控计算机、机载电台、GPS、惯性导航(IMU)、发动机及转速传感器、各操纵舵面以及机载任务设备等[7]。
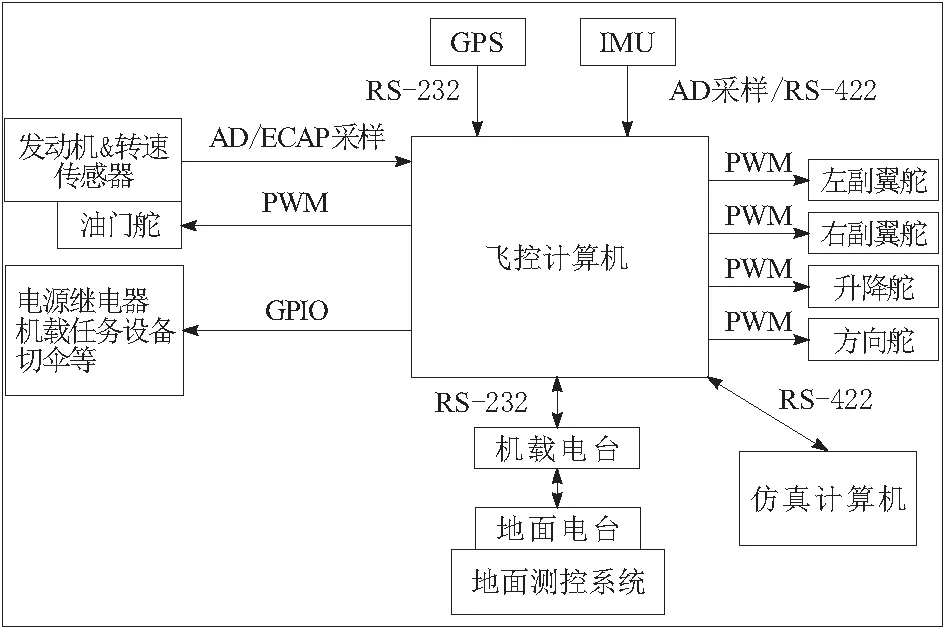
图7 飞控系统组件结构
飞控计算机是靶机的控制中心,该靶机采用TMS320F28335作为飞控芯片,负责接收地面系统的指令,控制靶机飞行,下发指令给各执行机构,协调各机载子系统的工作,并接收靶机各组件的反馈,将反馈信息发送给地面系统[8]。
靶机配置两路GPS,数据刷新频率为10 Hz,遵循NEMA0186协议,飞控计算机中解算$GPGGA与$GPRMC数据,获取时间、经纬度、高度、航速与航向等信息。优先使用GPSA的数据,当GPSA数据故障时,则飞控与地面测控系统自动切换使用GPSB。
靶机配备高频电台,与地面测控系统的电台构成通信,实现超视距控制。通信系统的上行链路为遥控链路,下行链路为遥测链路。设置电台波特率为38 400 B/s,该靶机遥测通信协议长度为52 B,一帧遥测数据时长约为11 ms。遥控通信协议长度为12 B,一帧数据时长约为2.5 ms。上行链路中包含靶机飞行与任务设备的控制指令,因此选择在F28335的5 ms定时器中接收数据。而下行链路用于传输靶机飞行状态信息,对数据率要求较低,选择在50 ms定时器中发送数据。通信链路的延迟在起飞、巡航与着陆阶段均满足该靶机操控需求。
舵机为舵回路的执行机构,可以输出力矩使舵面偏转。该靶机采用电动舵机控制各舵面运动,在靶机调试环节,需要调节各级闭环回路的参数,确保给定角度量和舵面实际偏转角度一致。其中,油门舵位于发动机进气口,通过调节进气量的大小,可以调整发动机转速,该转速由转速传感器采集。
2.2 信号输入与输出
在图7中标注了飞控计算机与靶机各组件的信号输入输出方式,本节对此做具体说明。
SCI模块为通用异步串行通信接口,主要应用于DSP处理器和PC机的RS232端口传输数据[9]。F28335有3个串行通信(SCI)模块,其中,将SCIA应用于仿真PC机的数据输入输出,SCIC应用于惯导数据输入。该靶机选用的惯导型号为THNC100-G1。惯导有两路信号输出,一路模拟量,另一路数字量RS422信号。两路信号均输入到飞控计算机中,模拟量接入AD采样,RS422信号接MAX3490芯片,转为RS232信号,接入F28335的SCIC端口,如图8所示。
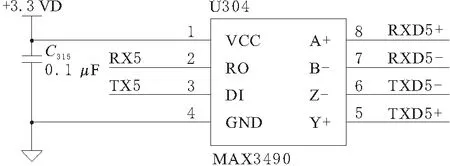
图8 靶机RS422信号通道
惯导上电时,需要初始化30 s之后才能发送正常数据,导致SCI通信产生错误中断标志位,因此需要在定时器中重新初始化SCI模块,清除此错误中断标志位。
与SCI通信类似,eCAP采样也采用中断方式。F28335的eCAP通道,可以检测输入引脚的电平跳变,并记录跳变时刻时基计数器TSCTR的值[10]。在捕获模式下,eCAP通道可以连续检测4次跳变。转速传感器在发动机每转一圈时能发出4次脉冲信号。因此发动机转速n与eCAP采样值关系为
(6)
f为系统时钟频率;T4为第4次电平跳变时刻的时钟值;T1为第1次电平跳变时刻的时钟值。
DI、DO模块用于投放诱饵弹、靶机开伞等。以靶机开伞为例,靶机伞舱的封舱线路上放置电爆管,在地面操纵人员发送开伞指令后,飞控计算机通过GPIO口输出高电平的电信号,引爆电爆管从而打开伞舱,靶机降落伞从中脱离并开伞。
UART模块,由TL16C754芯片,扩展4路RS232信号,分别用于电台通信、GPSA、GPSB与磁航向计。AD采样模块用于采样惯导模拟信号、采样机载电源电压信息与发动机转速模拟信号。PWM波为舵机的控制信号,占空比为5%~10%,飞控计算机通过调节PWM波占空比大小,可以控制各舵面的偏转角度。
3 铁存
在靶机的调试与起飞准备阶段,经常需要更改航线数据与部分飞控参数。而F28335的FLASH存储器需要通过JTAG仿真接口和CCS软件进行擦写,每次烧写程序必须打开靶机的飞控机舱与飞控机箱。在RAM中的数据则会断电丢失。因此,在DSP控制器中增设铁电存储芯片FM24V10,该芯片数据可以长期储存,拥有1 MB存储空间,能够快速读写,数据可以断电保存,相较EEPROM可靠性高、功耗低。将部分飞控参数、飞行航线等数据存入FM24V10,在需要初始化或者更改这些数据时,地面人员通过电台通信,将数据发送至飞控计算机,F28335对铁存进行写操作。如果系统上电初始化,则对铁存进行读操作,读取该类参数。如此便能实现航线与飞控参数的远程调试与更改。
4 仿真实验
该靶机配设仿真系统,可以输出数学模型至F28335中,在实际飞行之前进行半物理仿真实验,验证飞控程序以及各执行机构性能。
预设航线如图9所示,横轴为靶机东向相对距离,纵轴为靶机北向相对距离。
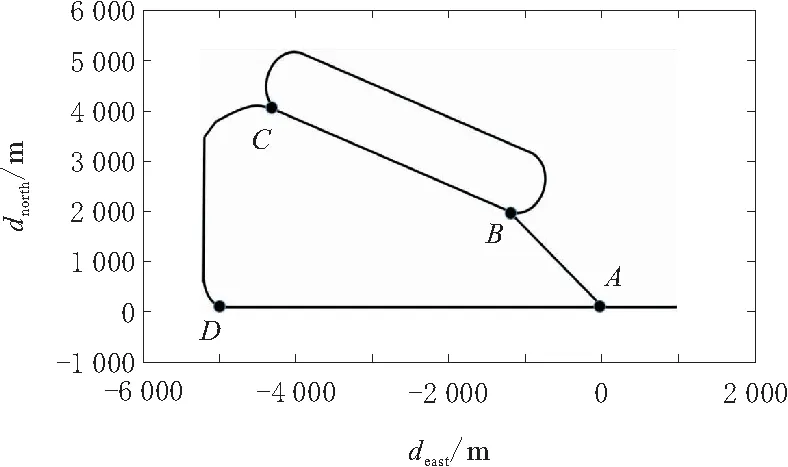
图9 仿真预设航线
靶机起飞点为A点,初始航向约为-30°,从B点进入椭圆轨道顺时针飞行2圈,在C点飞出椭圆轨道,在经过D点后,直飞至起飞原点开伞降落。在巡航阶段,靶机定高1 000 m。
仿真实验的三维航迹如图10所示。仿真实验的高度如图11所示。
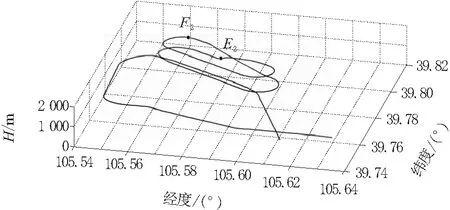
图10 仿真航迹
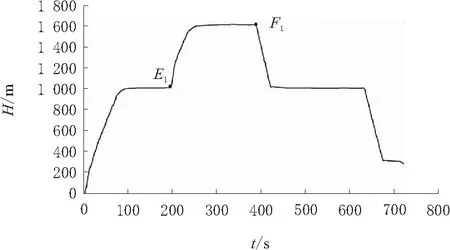
图11 仿真高度
在仿真飞行中,在图11的E1点(对应图10的E2点)调整靶机定高为1 600 m,靶机向上爬升至1 600 m,在图11的F1点(对应图10的F2点),调整靶机自主飞行,则靶机按照预设航线,自主调整巡航高度为1 000 m。最后靶机返回起飞原点开伞,在地面测控显示开伞时,经测量开伞线路电压为8.6 V,表明硬件线路有效。
5 结束语
该靶机飞控系统控制策略较为有效,飞控计算机与各机载子系统能够协调工作。仿真实验中,靶机基本按照预设航线飞行,且在飞行过程中随时可以进行有效的人工操纵,符合实用需求。