基于激光雷达与倾斜摄影融合技术的电力巡检系统设计
2020-10-22陈龙庆
韩 光,陈龙庆,许 义,王 伟,路 健
(国网安徽省电力有限公司合肥供电公司,安徽 合肥 230022)
0 引言
电力系统的定期巡检是电网安全运行的基本保障,但是随着我国电网基础设施的建设发展,电网电缆的规模剧增,在一些复杂电网线路中,架空输电线路走廊存在交叉跨越的情况,线下也会有一些树木、房屋、街道等复杂情况,仅仅依靠人工进行线缆维护无法实现巡检的全覆盖。集成了航空、通信、图像采集和识别的无人机电力巡检系统以它独特的优势在电网实际应用中得到了认可,成为电力巡检新的发展方向[1]。
目前,激光雷达和倾斜摄影在电力巡检系统中都有一定程度的应用,主要对输电线路进行三维建模和进行交互与测量,并在平台上呈现线路走廊的三维实景,为电力巡检等工作提供有效的数据支撑和技术手段[2]。单独应用激光雷达或倾斜摄影技术,无法兼顾可视化效果与无人机巡检效率。为此,本文在电力巡检系统中,将激光雷达与倾斜摄影技术融合,实现电力巡检系统设计。
1 基于激光雷达与倾斜摄影融合技术的电力巡检系统设计
1.1 激光雷达设计
激光雷达主要由激光扫描器、差分GPS接收机以及惯性测量单元构成,如图1所示。
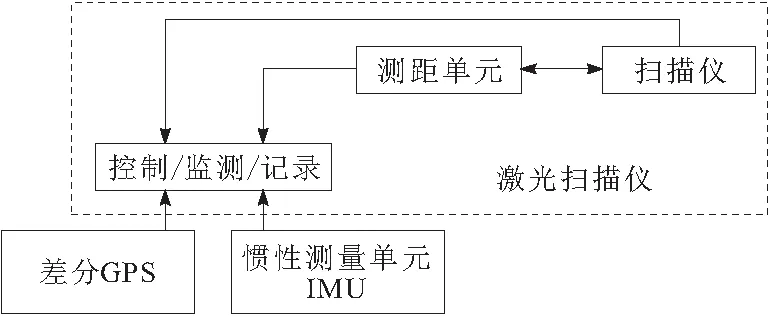
图1 激光雷达结构
激光雷达依靠扫描仪完成激光发射点到目标点之间的距离测量,激光所携带的能量高,相干性和方向性都比较好,能够实现对目标物体方位和速度的精确测量[3-4]。动态差分GPS的机载站GPS与机载LiDAR相连接,信号与地面的基准站同步处理,利用存在的载波相位测量差分技术获取投影中心点坐标[5-6]。其中惯性测量单元利用激光脉冲测距原理,能够测定激光主轴的俯仰角、侧滚角以及航偏角信息。本文采用的激光扫描器的型号为LMS511,扫描距离最大为85 m,测量的精度能够达到mm级,惯性测量单元的测量频率大概为150~200次/s,最大的角度范围为±85°,角度分辨率可达0.167~0.664°,通信接口采用的是RS232/以太网。激光发射器发射出激光脉冲波,能够实现测距,相关计算公式为
(1)
S为激光源到被测点的距离;t1为内部定时器的记录时间;t2为返回激光波时内部定时器的接收时间;C为光速。结合激光器的高度,激光扫描角度,就可以准确地计算出每一个地面光斑的三维坐标,通过无人机搭载激光雷达可以实现对通道内电力设施和周围地物进行扫描,然后生成高精度点云数据,可以提供电力走廊三维空间信息,实现走廊净空异常检查、提供精确的塔杆GPS坐标,特别是其独特的穿透林区及植被缝隙的能力[7-8],可以获得植被地区精细地形、地貌及植被高度、塔杆、输电线路等分类信息,从而为输电线路巡查和数字化管理提供新的技术手段。
1.2 倾斜摄影相机
本文系统中的倾斜摄影技术是目前巡检技术中的重点研究内容,是一种通过三维重建模型进行信息搜集和分析的尖端科技。倾斜摄影相机搭载在无人机上同时从垂直角度和4个不同的倾斜角进行影像采集,可以采集到完整、准确的地面物体信息,得到真实纹理的三维数据,建立更符合人眼视觉的真实直观三维模型,实现输电线路走廊的三维实景漫游,对通道内的房屋、道路、树木等调查、量测,构建出电力系统的真实场景[9-10]。本文采用的倾斜摄影相机拍摄角度如图2所示。

图2 倾斜摄影相机拍摄角度
该倾斜摄影相机配备1个下视镜头和4个倾斜视镜头,镜头可以选择RGB和RGBN镜头,影像可达到8千万像素,且能够变换三视和五视模式,三视模式下镜头的倾斜角为45°,五视模式下镜头的倾斜角为35°,不同视角下会出现摄影重叠情况,如图3所示。
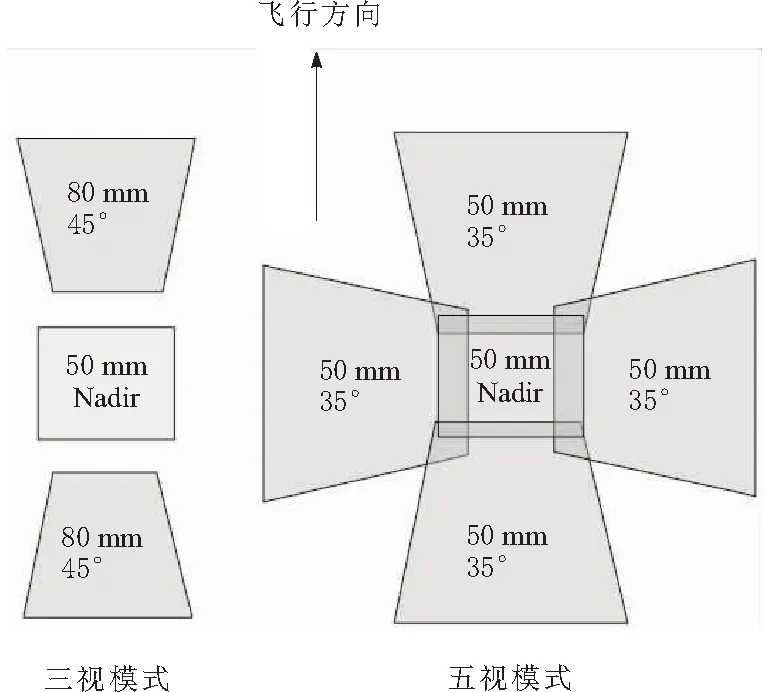
图3 倾斜摄影相机摄影示意
倾斜摄影技术是通过可见光进行拍摄的,因此对光线要求比较高,并且对植被下的地形无能为力,对细小物体(电塔、电力线)的建模能力不足,主要用来构建三维真实化场景。
1.3 软件设计
本文系统是针对输电线路中电力线、铁塔、附属设施和通道环境的空间信息进行三维激光扫描,形成输电线路通道内的高精度三维激光点云[11-12]。然后利用无人机倾斜摄影测量技术获取输电线通道高分辨率影像,建立输电线通道三维地表模型,最后进行数据融合,实现输电线通道以及相关设施的真实场景还原,并具备相关的量测、坐标获取以及隐患信息获取等功能。
1.3.1 点云数据、图片的采集与处理
激光雷达由于使用了激光脉冲测距,因此其测量精度非常高。激光雷达是连续的激光点云发射和接收的过程,采样数据以空间离散点云的形式存在。通过确定起飞点、制定飞行计划,完成外业数据的采集,得到GPS数据、IMU数据、码盘数据和原始微光点云,经过差分处理和解算姿态参数后,生成航迹,得到激光点云的三维数据。由于激光雷达会受到多种误差源的影响,需要对其进行精度校验,表达式为:
(2)
(3)
W=2Ltanθ
(4)
ρ为激光点云的密度;d为扫描光斑的直径;L为距离;W为带宽;θ为扫描半角。将上述雷达参数进行调整,与全站仪量测结果进行比较,选择结果最佳的参数作为最终参数。
倾斜摄影测量技术获取数据通过野外踏勘、选择像控点点位,并布设测量像控点,得到最终的外业测量结果;对倾斜摄影相机进行标定,通过无人机航拍得到垂直和倾斜的影像,将发生畸变的影像进行校正,得到矫正后的影像,协同外业测量成果和POS数据,经过空三加密、点云加密和点云坐标计算,得到影像匹配点云[13-15]。至此完成点云数据的采集和处理。
1.3.2 倾斜摄影与激光雷达技术融合建模
倾斜摄影与激光雷达技术获取数据的效率都比较高,这2种技术之间的区别如表1所示。
表1 倾斜摄影与激光雷达技术的区别与特点
从表1可以看出,倾斜摄影与激光雷达都有自己的特点,刚好能够互补,因此将这2种技术在电力巡检系统中进行融合建模。具体的项目实施流程如图4所示。
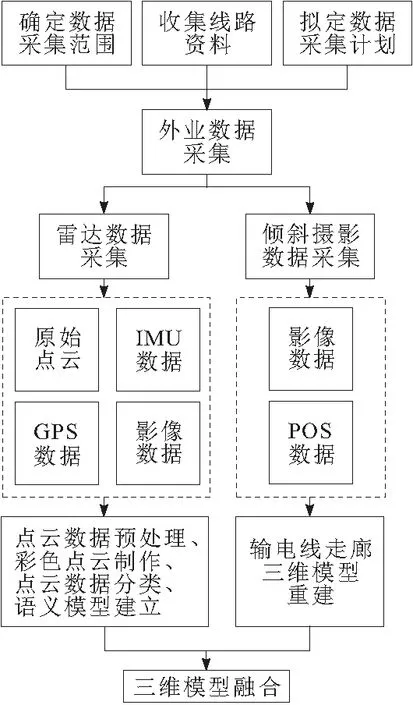
图4 电力巡检系统工作流程
在该电力巡检系统中,同时使用激光雷达航测和倾斜摄影技术采集点云数据与倾斜影像,对激光雷达技术获取的点云数据进行分层,分离出建筑、道路等地面物体,结合倾斜摄影的垂直影像,制作出正射影像图(DOM)[16],结合电力走廊的数字高程模型(DEM)和数字表面模型(DSM),建立无贴图纹理的走廊三维模型,并通过倾斜摄影技术在电力走廊的表面纹理数据贴图,进行自动化处理和高精度自动化构建,完成输电线路走廊的三维视景建模。
2 系统性能测试
2.1 测试准备
为了验证本文设计的系统是否具有一定有效性,选取220 kV常贾线进行实验,实验区地形如图5所示。
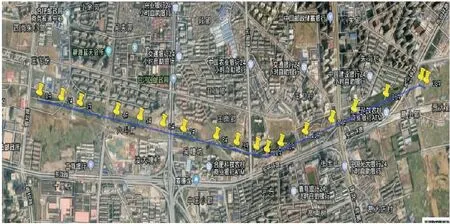
图5 实验区概况
依据线路巡检的应用需求,按照倾斜摄影带宽左右各100 m,激光雷达左右各50 m进行飞行设计。确定本测试工程中的线路路径走向,倾斜摄影的测量范围为线路路径左右500 m,根据条件进行合理的无人机飞行划分,并根据测区大小选取具有标志性的点现场测量,用于后期数据处理和成果检验,并保证坐标系统和高程基准的统一。实验中需要用到的设备以及相关参数如表2所示。
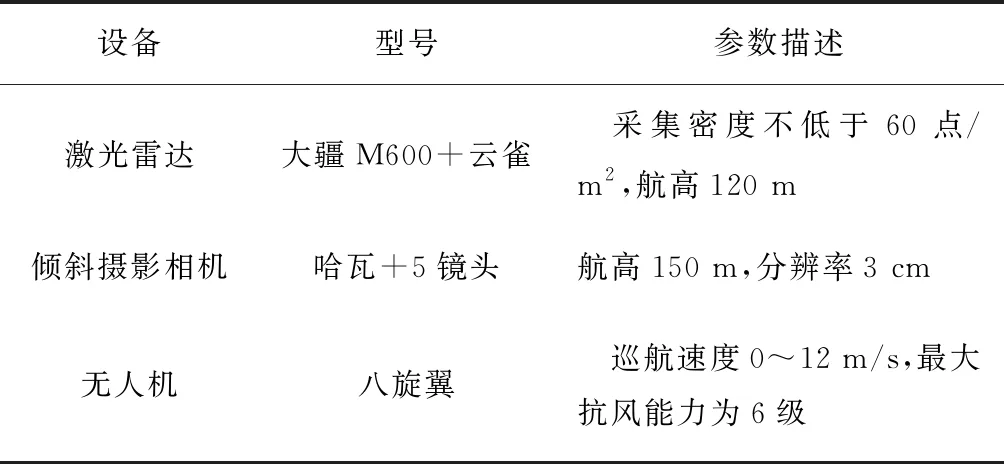
表2 测试设备以及参数
为了保证满足实验要求的地面采样距离,需要控制无人机的飞行高度来控制摄影物距D为
(5)
q为地面采样距离;nl为长边像元数量;F为镜头水平方向视场角。
根据测区大小选取具有标志性的点现场测量,用于后期数据处理和成果检验,并保证坐标系统和高程基准的统一。
在上述的测试环境下,分别使用本文设计的系统与激光雷达电力巡检系统、倾斜摄影电力巡检系统共同进行测试,并将测试结果进行分析对比。
2.2 实验结果分析与对比
在上述测试环境下,激光雷达和倾斜数据处理完成后,将2套数据的坐标调整为同一个坐标系系统和高程基准,然后取激光雷达的导线、杆塔激光点云与倾斜数据进行融合,以满足展示、量测、分析等功能。
2.2.1 三维模型
本文系统构建的三维模型如图6所示。
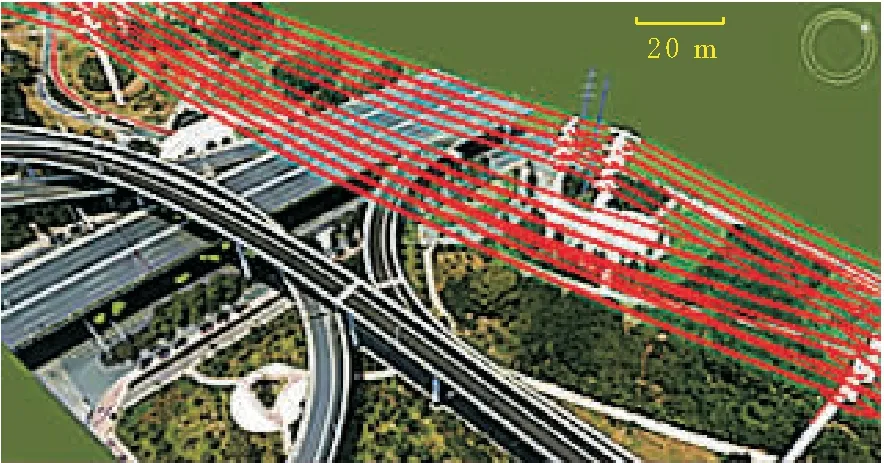
图6 本文系统构建的模型
2.2.2 巡检时间
为了验证所设计系统的无人机巡检效率,采用所设计系统、基于倾斜摄影系统以及基于激光雷达系统检测无人机巡检时间,不同系统下巡检时间结果如图7所示。
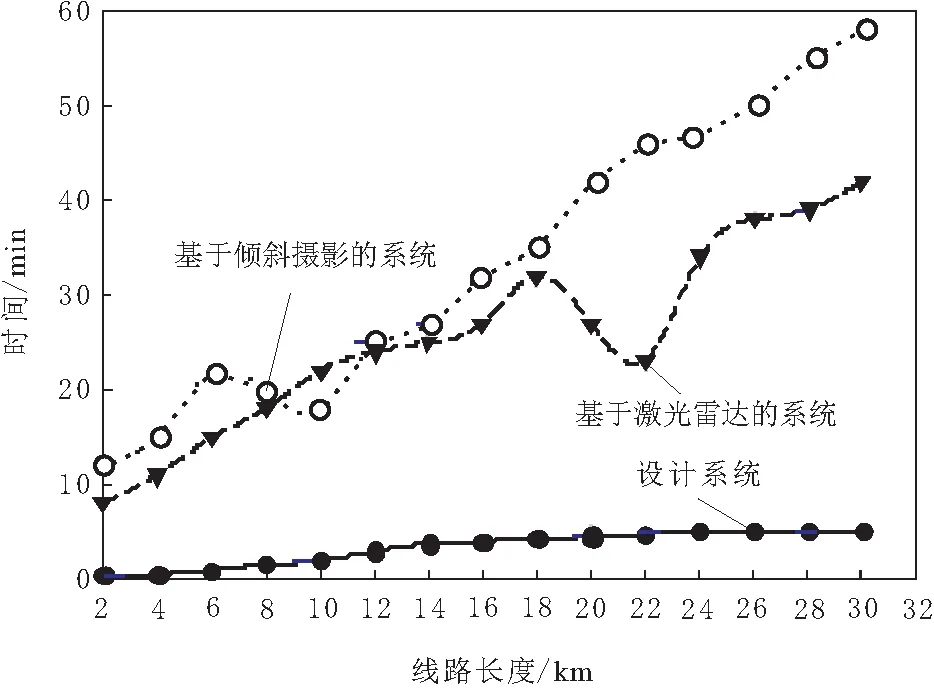
图7 不同系统下巡检时间
分析图7可知,不同系统的无人机巡检时间不同。当线路长度为10 km时,设计系统的无人机巡检时间为2 min,基于倾斜摄影系统的无人机巡检时间为18 min,基于激光雷达系统的无人机巡检时间为22 min。当线路长度为30 km时,设计系统的无人机巡检时间为5 min,基于倾斜摄影系统的无人机巡检时间为58 min,基于激光雷达系统的无人机巡检时间为42 min。
测试结果表明,本文方法的无人机巡检时间明显低于其他方法,具有较高的巡检效率。这是因为本文有效融合了激光雷达或倾斜摄影技术,提升了巡检效率。
2.2.3 输电线走廊可视化效果
采用本系统对输电线走廊进行可视化处理,得到结果如图8所示。
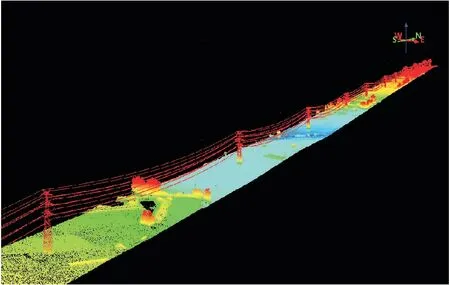
图8 输电线走廊可视化效果
由图8可知,所设计系统对输电线走廊的可视化效果极好,可获得高精度的电力走廊三维空间信息,为走廊净空异常检查提供精确的塔杆GPS坐标,通过其穿透林区及植被缝隙的能力,可以获得植被地区精细地形、地貌及植被高度、塔杆、输电线路等分类信息,从而简化输电线路巡查工作。
3 结束语
输电线路覆盖的区域逐渐增加,一些地形复杂、环境恶劣的山区等也逐步通电,为保证输电线路的安全运行,需要对供电设备定期巡检。为了提高巡检效率,电力巡检系统成为了安全、高效的巡检方式。
本文针对传统系统在三维建模方面的弊端,设计一种基于激光雷达和倾斜摄影融合技术的电力巡检系统。实验结果表明,本文设计的系统在一定程度上能够减少电力巡检时间,提高巡检效率,这种融合技术也是无人机电力巡检重要的发展方向。在本文系统建立的模型中,可以实现漫游、旋转、量测,对交叉跨越信息、树障进行分析,查找线路隐患、摸清线路周围情况,为线路运维检修提供切实的协助。