基于5G网络技术的智能扫地机器人控制算法研究*
2020-10-22叶允英
叶允英
(宁德职业技术学院 福建福安 355000)
随着5G网络通信技术的发展,采用5G网络通信实现智能家居的物联网设计,提高家居生活品质,智能扫地机器人作为智能家居生活的重要组成部分,在进行智能扫地机器人设计和应用过程中,智能扫地机器人控制设计是整个机器人稳定性操控的关键。结合5G网络技术,进行智能扫地机器人控制模型优化设计,结合智能避障和空间路径规划方法,实现智能扫地机器人的控制优化[1],在提高智能扫地机器人的路径规划能力和避障能力方面具有重要意义。相关的智能扫地机器人控制算法研究受到人们的极大关注。
对智能扫地机器人控制算法设计是建立在对智能扫地机器人的运动模型和参数优化调节技术上,结合参数自适应融合控制方法[2],实现智能扫地机器人控制算法设计。文章结合5G网络技术,进行智能扫地机器人控制过程中的物联网规划设计,建立智能扫地机器人控制对象模型和参数优化模型,采用动态反馈调节方法进行机器人控制过程中的误差调节,建立智能扫地机器人的输出稳定性控制模型,结合5G网络技术实现机器人控制算法的优化设计,并通过仿真实验进行性能测试,得出有效性结论。
1 扫地机器人的控制对象分析和约束参量
1.1 扫地机器人的控制对象
为了实现基于5G网络技术的智能扫地机器人控制,需要首先构建智能扫地机器人的控制对象模型,结合空间路径规划方案,进行智能扫地机器人的避障控制,针对仿人机器人运动过程中的远程控制和网络联网通信问题[3],采用5G网络技术进行智能扫地机器人的输出网络控制,构建扫地机器人的空间规划运动数学模型分析。采用动力学参数调节方法,进行智能扫地机器人的输出稳定性控制,构建智能扫地机器人的避障运动数学模型。在建立扫地机器人的避障运动模型之前,先做如下几点基本假设:①扫地机器人的工作环境为一个二维空间环境,机器人的体模型结构为一个刚体模型,机器人的质量模型及相应的步态生成器关于纵向运动平面对称,形成机器人运动空间的空间坐标系;②扫地机器人的空间路径规划和避障参数满足线性假设;③忽略因为家居环境的不稳定性以及机器人运动轨迹的偏离导致的扰动误差;③近似认为扫地机器人的纵向运动平面坐标系为惯性坐标系[4]。根据上述定义,构建智能扫地机器人控制对象模型,给出智能扫地机器人控制的三组坐标系,分别为体坐标系Ox3y3z3、地球坐标系Ox1y1z1、三维组合坐标系Ox2y2z2、球面坐标系Axyz。
在非刚性约束条件下,建立智能扫地机器人的参考质心轨迹 xref.,机器人的控制模型为一个欠阻尼 2 阶系统,表述为:
(1)
(2)
(3)
(4)
α=-θ
(5)
δz=f(e1)
(6)
其中,θ—扫地机器人质心的移动质心,表示机器人本征频率;—动力学的线性参数,表示扫地机器人的纵轴(Ox1轴)与水平面(Oxy平面)间的夹角; α—勒贝格可测对象集,δz—笛卡儿运动根据参数;e1—避障控制的误差;m—扫地机器人的质量;X,Y—表示作用在智能扫地机器人上的惯性力矩;M—2 阶多输入的管理力矩;J2—扫地机器人绕体坐标系各轴的转动惯量。
根据上述运动参数模型设计,构建智能扫地机器人的运动学和动力学模型,采用多参量融合分析方法进行扫地机器人的输出参数调节,建立智能扫地机器人的空间参数分布模型,提高智能扫地机器人的控制稳定性[5]。
1.2 控制约束参量分析
在上述机器人的控制对象模型分析的基础上,进行机器人控制约束参量分析,在5G网络技术下,建立机器人控制的物联网模型;采用ZigBee网络通信协议,进行智能扫地机器人控制稳定性分析,提取智能扫地机器人输出稳定性特征量,采用模糊约束方法,进行智能扫地机器人避障控制过程中的输出稳定性调节;分析机器人避障的动态参数,用Vna、Vk和VL分别表示扫地机器人的扰动特征量和速度,在误差稳定性调节模式下,得到智能扫地机器人的控制参数分布为αm、βm、αh、βh、αn和βn是v。其定义如下:
αm(v)=0.1(25-v)/(exp((25-v)/10)-1)
(7)
βm(v)=4exp(-v/18)
(8)
αh(v)=0.07exp(-v/20)
(9)
βh(v)=1/(exp((-v+30)/10)+1)
(10)
αn(v)=0.01(10-v)/(exp((10-v)/10)-1)
(11)
βn(v)=0.125exp(-v/80)
(12)
根据上述定义,结合扫地机器人的运行环境,在5G网络技术下,分析系统状态变量x的初值问题,构建扫地机器人的控制参数优化调节模型。在不同形态下,得到控制参数自适应调节模型为:
单自由度:
二自由度:
(14)
三维:
Jxωx1+(Jz-Jy)ωy1ωz1=Mx1
(15)
采用多参量融合分析方法进行智能扫地机器人的控制约束参数分析,在5G网络环境下实现扫地机器人的运动链模型设计,得到二维运动惯性参数{A0,A1},在旋转自由度下得到系统协态变量q0=[α0,β0,γ0]T≡[θ1,θ2,θ3]T,以此描述机器人的姿态变换特征,采用逆运动学模型进行最优控制参数跟踪[6],得到扫地机器人在5G网络环境下的控制约束参量矩阵描述为:
(16)
目标泛函的梯度0T4为:
(17)

2 扫地机器人的控制算法优化
2.1 基于5G网络技术的物联网控制

(18)
在5G网络环境下实现智能扫地机器人的网络输出控制,分析机器人控制的收敛速度,得到Lyapunov函数为:
(19)
对5G网络环境下智能扫地机器人控制的Lyapunov函数求导:
(20)
结合动态反馈跟踪融合的方法,在5G网络环境下进行智能扫地机器人的避障控制,得到避障控制的自适应律为:
(21)
代入自适应律,得到避障控制函数满足:
(22)
(23)
综上分析,根据Lyapunov稳定性原理,进行5G网络技术下的扫地机器人物联网控制[8]。
2.2 控制律优化设计
结合虚拟稳定性分析的方法,进行5G网络技术下扫地机器人的控制律设计,控制误差函数记为:
(24)
分析笛卡儿空间速度矢量,得到收敛误差满足:
(25)
根据笛卡儿空间速度矢量,进行智能扫地机器人的输出稳定性调节,得到自适应加权系数为:
(26)
其中,机器人连接处的加权参量为x1,x2,…,xn,权重值w1j,w2j,…,wnj。分析机器人控制的惯性权重,得到:
s=ce1+e2
(27)
基于子系统动态参数融合方法[9],得到机器人的转动误差为:
(28)
令

(29)
根据参数自整定性调节结果,得到机器人的控制干扰项收敛到:
(30)
综上分析,采用动态反馈调节方法进行机器人控制过程中的误差调节,实现扫地机器人控制算法的优化设计[10]。
3 仿真测试分析
为了验证文章方法,在实现智能扫地机器人智能控制中的应用性能,进行仿真实验。实验的仿真工具采用Matlab设计,采用Optotrak Certus HD 光学运动跟踪工具进行机器人的运动轨迹跟踪,控制约束参量设定见表1。
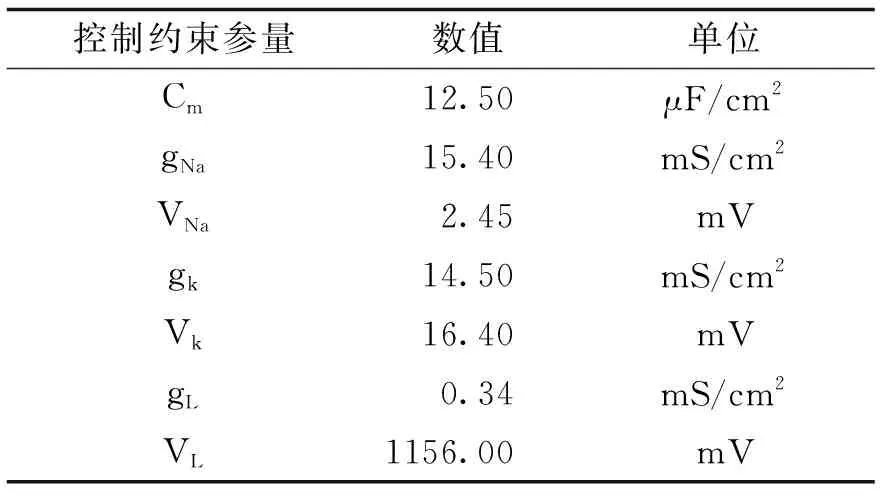
表1 扫地机器人智能控制参数设计
根据上述仿真环境和参量设定,进行智能扫地机器人控制,在机器人上安装6维力/力矩传感器进行信息采集,得到机器人的位置参数跟踪曲线如图1所示。
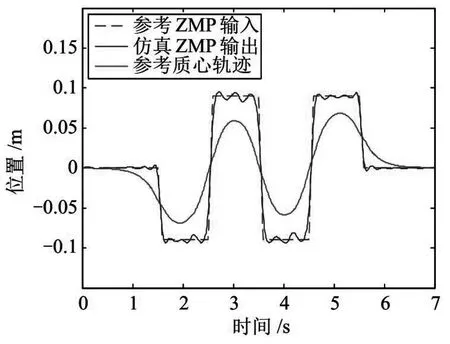
图1 机器人的位置参数跟踪曲线
分析图1得知,采用文章方法进行智能扫地机器人控制的位置跟踪性能较好,测试智能扫地机器人加速度控制曲线,如图2所示。
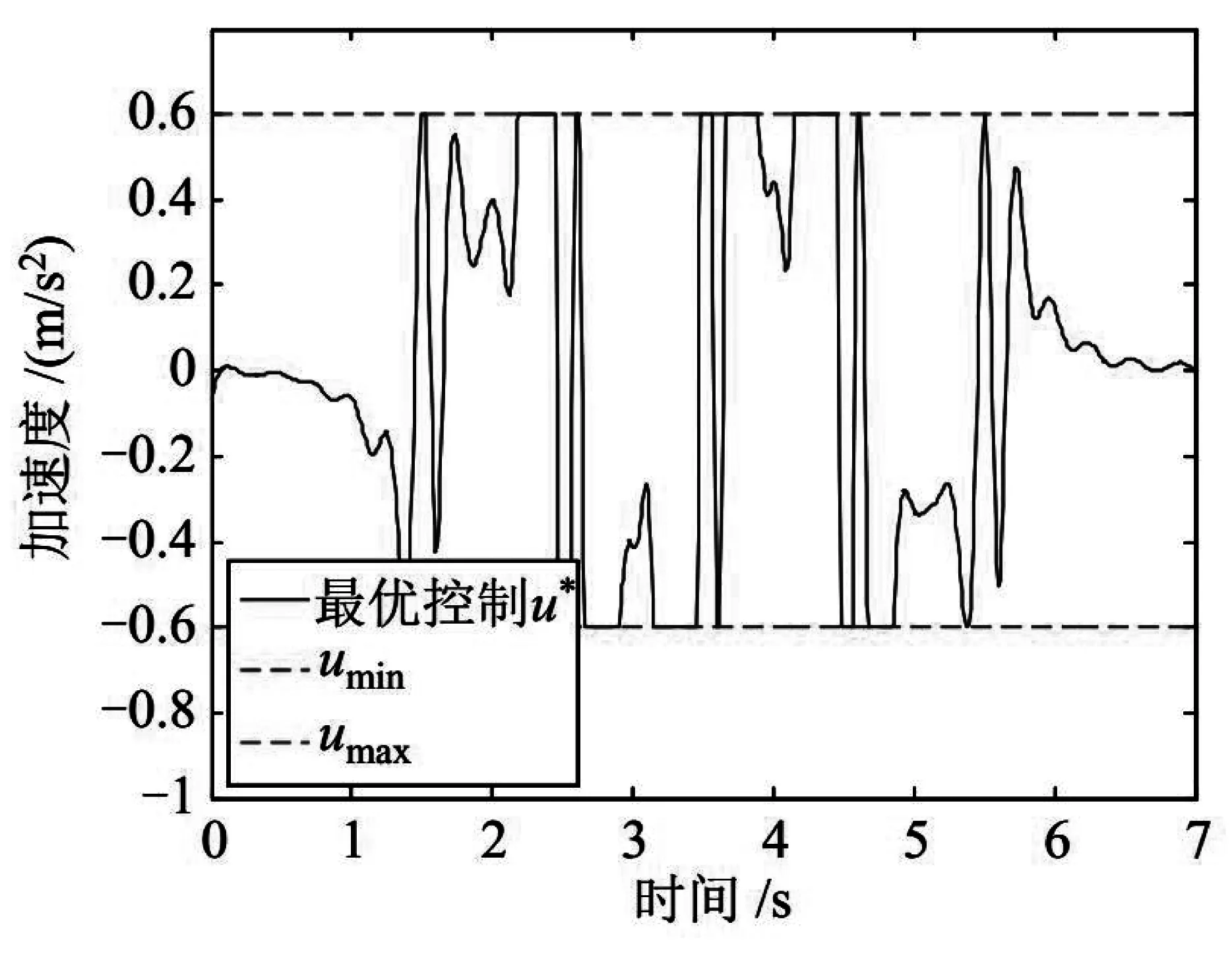
图2 加速度控制曲线
由图2可知,采用文章方法进行机器人的运动轨迹跟踪,加速度跟踪性能较好,提高了机器人的避障性能,测试控制收敛误差,得到结果见表2。由表2可见,文章方法进行机器人控制的收敛误差较小。
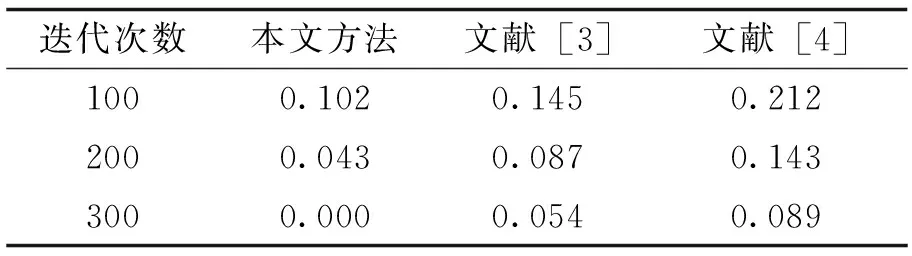
表2 机器人控制误差对比(单位:mm)
4 结语
采用网络技术进行智能扫地机器人控制模型优化设计,实现智能扫地机器人的控制优化,文章提出了基于5G网络技术的智能扫地机器人控制算法,构建了智能扫地机器人的运动学和动力学模型;采用了ZigBee网络通信协议,进行智能扫地机器人控制稳定性分析,提取智能扫地机器人输出稳定性特征量;采用了多参量融合分析方法,进行智能扫地机器人的控制约束参数分析;采用了动态反馈调节方法,进行机器人控制过程中的误差调节,实现了控制算法优化。分析得知,文章方法进行智能扫地机器人控制的额输出跟踪性能较好,误差较低。
