基于PLC的玉米机械播种量控制系统设计
2020-10-19王贵丽耿艳利刘小凡
王贵丽,耿艳利,刘小凡
(1.河北机电职业技术学院,河北 邢台 054000;2.河北工业大学 人工智能与数据科学学院,天津 300130)
0 引言
玉米是我国的主要粮食作物之一,具有产量高、价值高、对种植环境无气候和地址条件要求的优点,在我国种植范围非常广[1]。玉米播种是玉米种植的关键环节,我国传统的玉米播种方式是玉米点播或者条播,但效率低下、耗时较长、播种质量不高,导致出苗率低,影响玉米产量。播种量是玉米播种的关键指标,播种量的高低也会影响玉米的出苗率、均匀性和产量[2-3],对于玉米播种量的控制和调节也是玉米播种的关键问题。因此,研究高效率的机械精密播种机,提高播种效率并适度调节播种量,对玉米播种具有重要意义。
机械式玉米播种机具有结构简单、工作可靠性高、价格低廉的优点,相较于传统的播种机,其对土壤的干扰更小,尤其对土壤原有的水分和养分影响小。机械播种机的核心部件是排种器,其工作原理是将种箱的种子转化为种子流,在重力的作用下分离出种子流中的单粒种子进行投种。
可编程控制器(PLC)是一种可以用来完成用户操作指令(如逻辑判断、计数、运算等)的工控装置[4],其程序采用梯形图语言和工业控制用操作指令进行编制[5],具有结构简单、易于安装调试、抗干扰能力强及维护方便等优点。因此,本文将PLC应用于机械玉米播种机,对玉米播种量的控制系统进行研究。
1 设计思路
1.1 总体设计路线
玉米机械播种量控制系统的总体结构设计图如图1所示。该系统主要由传感器模块、无线传输模块、PLC控制模块、光电驱动器、步进电机和排种器组成。
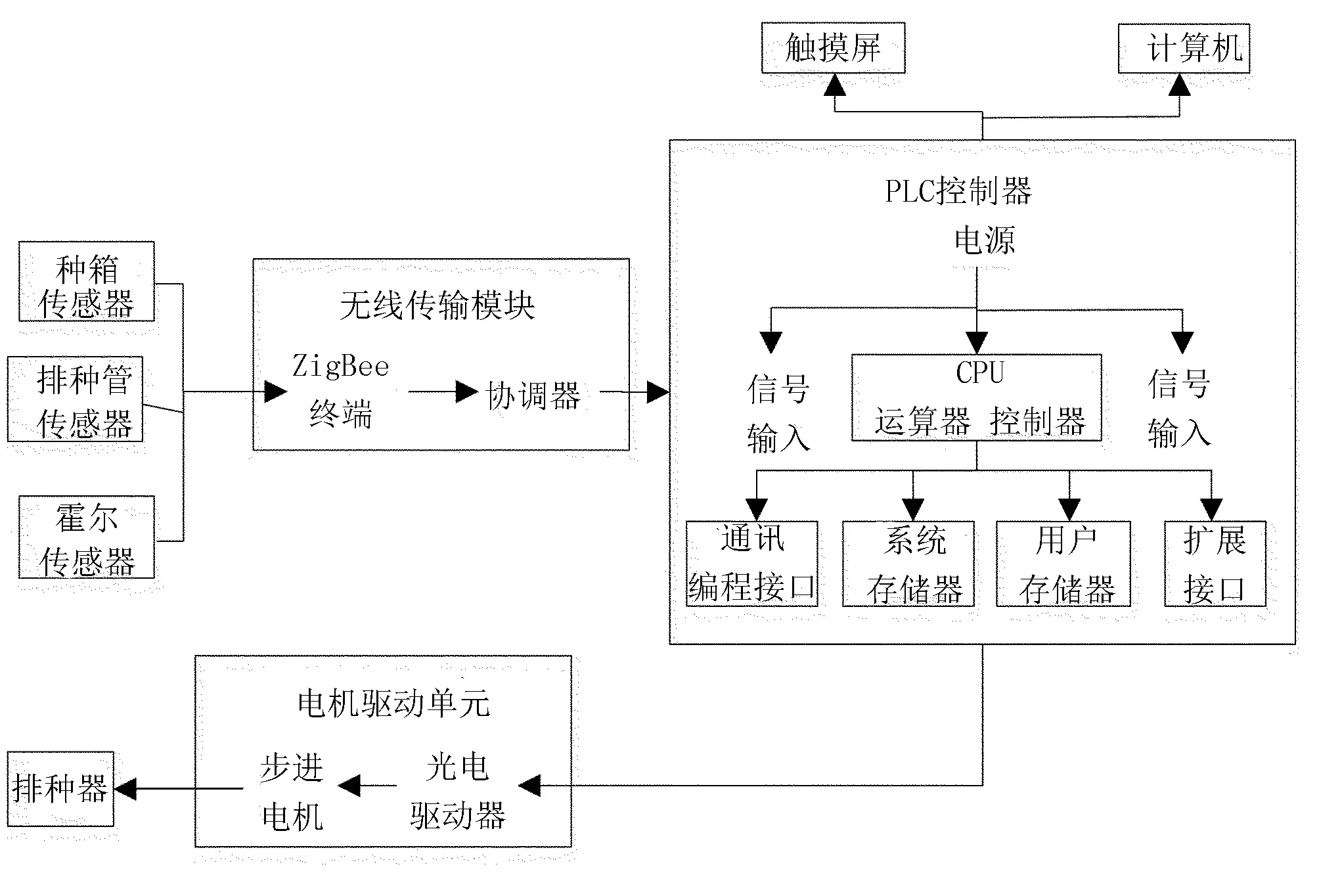
图1 玉米机械播种量控制系统总体结构设计图。
1.2 传感器模块
传感器一般由感知元件和转换器件组成,作用是将获取的外界信号转换为电信号,并最终传输给控制系统。传感器的类型需要按照精确度、测量方式和灵敏度等进行选择。对于本文来说,主要选取3个传感器:①种箱传感器,用于监控种箱内的种子数量;②排种管传感器,用于监控排种管的种子堵塞,是否存在漏播、重播等现象;③速度传感器,用于监控播种台的移动速度,适时调整种子的下落速度。
1.3 无线传输模块
传感器和控制器之间的信息传输采用ZigBee无线传感网络。ZigBee终端负责采集接收各传感器信息,协调器负责将接收到的信息通过串口传递给PLC控制器。无线传输的方式不仅可以简化设备线路,减少线路故障,还可以提高控制系统的稳定性。
1.4 PLC控制模块
PLC控制模块作为播种机的控制单元,需要完成对步进电机的精确控制,且需要能够兼容与触摸屏和各传感器的连接。三菱PLC的兼容性和稳定性较好,擅长控制步进和完成复杂的动作,且有专门的定位指令[6],因此采用三菱PLC进行控制,其电路图如图2所示。

图2 PLC电路图。
PLC的工作过程主要包括3个阶段:①输入采样阶段,用于完成数据的读取并存储到响应的单元;②程序执行阶段,即PLC按照从左至右、从上至下的顺序读取程序,对数据进行计算并将结果更新存储或输出;③输出刷新阶段,即刷新电路信息,并向相关外部设备发送指令[7]。
1.5 电机驱动单元
电机驱动单元主要包括光电驱动器和步进电机。通过利用光电驱动器驱动步进电机,进而控制排种器进行排种,并可以根据播种情况和播种台移动速度对播种量进行调整控制。
1.6 排种器
排种器有型孔式、气力式及外槽轮等类型的排种器。其中,外槽轮排种器相对于其他类型排种器具有结构简单、经济性好、运行可靠性和适应性强的特点,能够充分满足农业生产的需求。因此,本文选用外槽轮排种器,其结构示意图如图3所示。

图3 排种器结构示意图。
2 播种量控制软件设计
步进电机驱动排种器排种,其输出轴通过联轴器与排种器的排种轴连接,两者同步旋转,因此步进电机的转数和排种器的播种量存在一定的关系。根据排种器的结构,排种轴旋转带动排种器工作,使种箱内的玉米种子排种,且旋转频率越快,玉米种子的排除速度越快,播种量越大。排种器排种轴转数Nt和播种量M的关系为
M=kNt+b
其中,k和b均为常数。因此,排种轴的转数和播种量是一一对应关系,且排种轴和步进电机同步旋转,可以通过控制步进电机的转速控制播种量。式中,k和b可以通过试验确定。
当播种台的运行速度改变时,步进电机的转速同时改变,即播种台运行速度快,则步进电机转速加快;播种台运行速度减慢,则步进电机转速减慢。为了能够根据播种台的行进速度实时调整播种量,需要确定播种台行进速度和步进电机转速之间的函数关系。
假设播种台播种的单位面积为S,播种台行进速度为v,步进电机转速为vt,转数为N,排种器的摆幅为W。在单位面积S内的播种量M一定,其值与播种台行进速度和步进电机的转速无关,则播种台播种单位面积所需时间t1为
传动比为i,则步进电机的转速vt为
对比以上两个公式得
结合排种器排种轴转数和播种量的函数关系得
此式即为播种台的运行速度v和步进电机的转速vt的关系。
3 播种量试验与结果
3.1 试验设计
为了验证该试验装置性能,将该装置分别在实验室环境和田间环境进行试验[8]。实验室环境干扰因素少,工作条件简单,因此在该环境下对试验设备进行研制,在此状态下进行试验不需要考虑环境对设备的影响,可缩短研制时间,但试验环境对于试验结果有局限性。因此,为了充分验证试验设备的可行性,在设备研制完成后将该设备在田间进行试验。
3.2 实验室试验
1)排种器排种轴转数Nt和播种量M函数关系的确定。首先需要确定函数关系中的k和b,调整步进电机转速,采集不同转速下排种轴的转数和播种量,结果如表1所示。
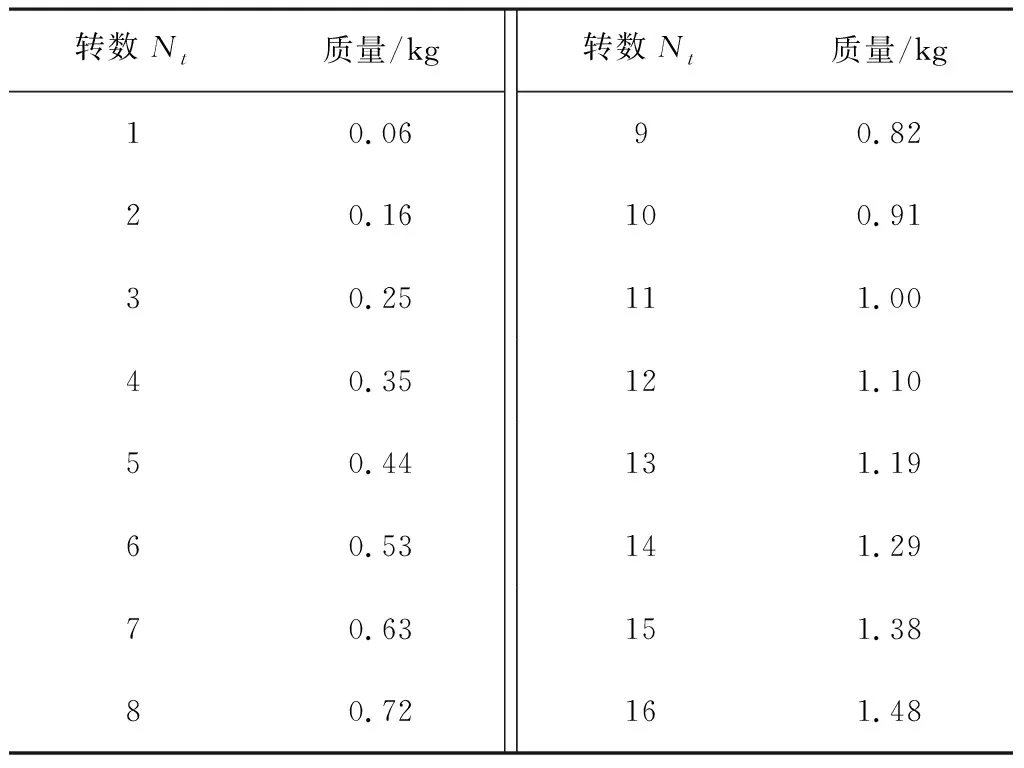
表1 排种轴转数Nt和播种量M关系。
通过对表格中的数据进行线性拟合,得到排种器排种轴转数和播种量的关系为
M=0.0941Nt-0.0305
由于播种机不工作时,转速Nt为0,播种量M为0,因此对上式进行修正,得到修正后的函数关系为
M=0.0941Nt
2)实际播种量M′的确定。在触摸屏输入播种量M值,启动播种器开始工作,此时播种台的运行速度为v,单位播种面积为667m2,步进电机传动比i为1,排种器的摆幅W为2m,将数据带入函数关系式得
简化得到以下函数关系
vt=1.848vM
由该式可知:当播种量M确定时,播种台运行速度v和步进电机转速vt随动关系即可确定。在种箱内放入玉米种子,并设定播种机运行距离为100m,对排种器进行标定试验。通过在触摸屏输入不同的参数,为保证数据的准确,每个输入参数进行两次试验,并取平均值,记录实际播种量M′,结果如表2所示。
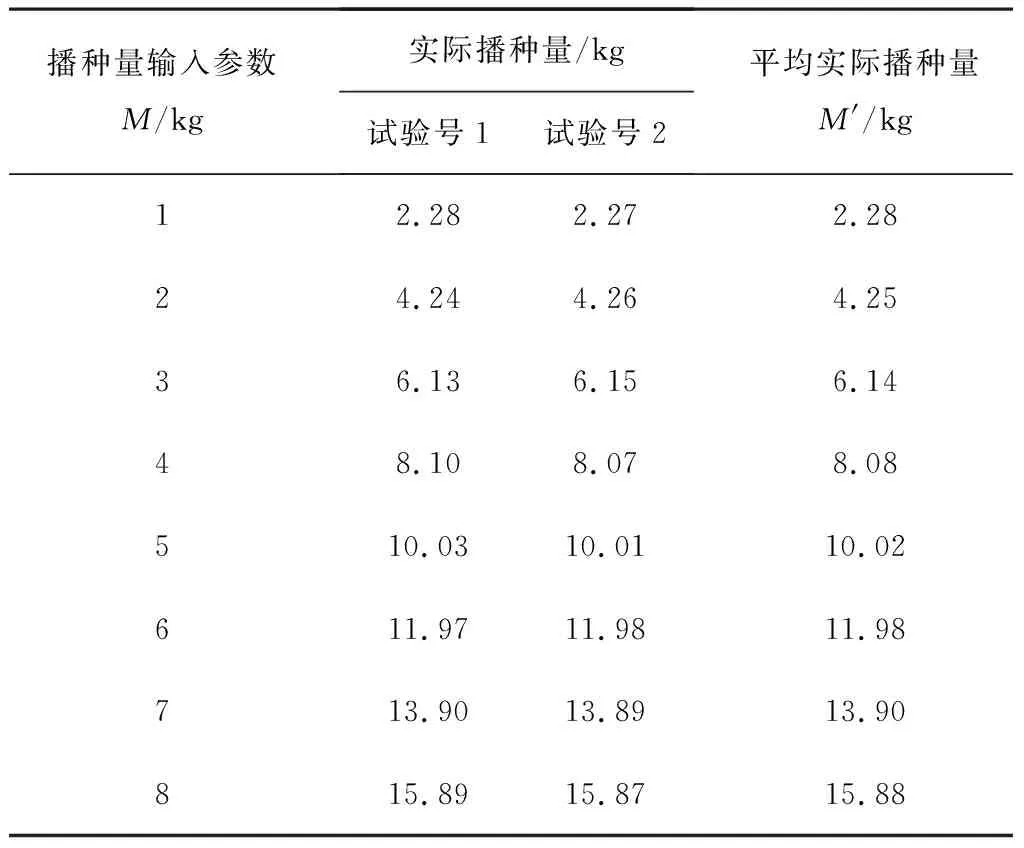
表2 播种量输入参数M与实际播种量M′关系。
通过对表2数据进行线性拟合,得到播种量参数M和实际播种量M′的函数关系为
M′=0.1936M+0.3428
3.3 田间试验
选取一块较平整的土地作为试验田,利用该排种器对玉米进行播种。按照玉米生长的环境,确定玉米的行距为20cm,一共播种15行,排种器摆幅2m,每亩播种量定为6kg,播种量的输入参数为28。将以上参数输入触摸屏,启动播种量控制系统,播种器开始工作。在播种器工作过程中,观察排种器正常工作,步进电机的运行状态良好和玉米种子的分布均匀。田间试验证明:该播种器能够完成玉米的播种。
3.4 播种质量验证
根据国家标准,播种器的播种质量要达到种子均匀性的变异系数小于40%(10cm分段)。因此,需要在种床上进行播种质量试验。在种床带上涂抹油使落到种床带上的种子位置不变动,设置步进电机速度为2.8km/h,待播种器稳定工作一段时间后停止。任意选取种床带上50cm的距离,均分为5部分,统计每部分的种子数量,并计算试验的变异系数(变异系数=标准偏差/平均值)。为保证试验结果的准确性,该试验进行3次,结果如表3所示。
由表3可知:该播种机播种量控制系统达到了国际的播种均匀性的标准要求,能够满足用户的使用要求。
4 结论
1)针对玉米的播种量设计了玉米机械播种机,该设备的主要组成为各传感器模块、无线传输模块、PLC控制模块、电机驱动单元和排种器。同时,设计了播种量控制系统,使播种量可以根据播种台运行速度进行调整。
2)设计的玉米播种器经过了实验室试验和田间试验,结果表明:系统均能够稳定工作,实现了播种量和播种太行进速度的匹配。
3)田间试验表明:播种质量均匀性能够达到变异系数小于40%的国家标准,性能能够满足用户的使用需求。
