篮球战术在采摘机器人避障模糊控制系统中的应用
2020-10-19赵晓红李海玉
赵晓红,李海玉
(河北科技师范学院 体育系,河北 秦皇岛 066004)
0 引言
蔬菜水果采摘是最具有技术含量,也是最费时费力的劳动,急需实现自动化,而采摘机器人的避障与目标导引是整个自动化系统中的核心[1]。目前,避障与目标导引方式主要分为图像采集分析[2]进行路径规划和测距传感器遗传模糊控制[3]两大类。图像采集分析方法具有避障精度高的特点,但需要高清摄像机组及高性能工控机等设备[4-5],成本高,不适用于大规模普及;同时系统过于复杂,稳定性差,不能在高温高热的塑料大棚环境中稳定工作。测距传感器遗传模糊控制系统[6],具有设备简单、可靠性高的特点[7],但模糊规则与算法不完善,严重制约着避障精度[8-9]。为了实现采摘机器人的大规模普及,采用测距传感器、基于篮球战术规则[10]制定模糊规则,设计了避障与路径规划系统,和传统测距传感器模糊控制系统相比,精度明显提高,达到了大规模普及的要求。
本文的设计思路如下:①设计采摘机器人的行走机械结构与控制系统;②对机器人进行运动学分析,提出模糊控制输入变量;③建立模糊控制系统,包括避障系统、目标导引系统、权重分析系统和动作融合系统,并基于篮球战术规则建立模糊规则;④模糊系统输出机器人的速度V和转角Δθ;⑤对系统进行仿真,检验避障精度与可靠性。
1 行走结构与控制系统
1.1 行走结构
设机器人正前方为Y轴,行走结构如图1所示。
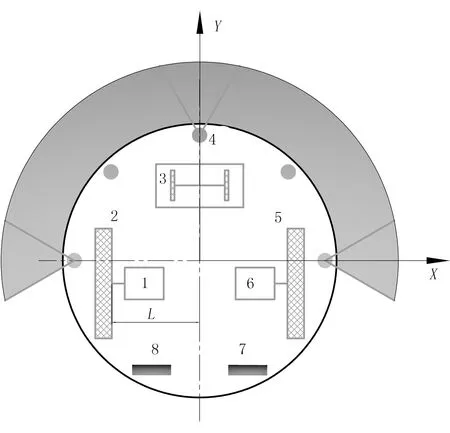
图1 机器人行走系结构1.左驱动电机 2.左驱动轮 3.支撑万向轮 4.测距传感器 5.右驱动电机 6.右驱动轮 7 .右转向灯 8.左转向灯Fig.1 The walking system Structure of robot
采用圆盘形布局,半径为R;左右两个驱动轮,半径均为r,到Y轴的距离为L,分别由步进电机1和6独立驱动;支撑万向轮起到支撑行走系和转向辅助功能;超声波测距传感器检测范围为2.5~200cm,检测角度为60°。5颗超声波传感器分布如图1所示,两相邻传感器夹角为45°,小于传感器检测角,可实现无盲区检测,同时障碍检测范围以Y轴为中心达到240°。该行走系主要实现以下功能:
1)前进。两步进电机以相同角速度ω使两驱动轮正向转动实现前进效果,通过控制ω的大小控制速度,速度为V=ωr。
2)转向。设机器人向左转向为正,向左转向时,左驱动轮以角速度ω转动,同时右驱动轮以角速度-ω转动,右转角速度ar=2ωr/R;向右转向时,右驱动轮以角速度-ω转动,同时左驱动轮以角速度ω转动,左转角速度al=-2ωr/R。
3)后退。此时,两步进电机以相同角速度-ω使两驱动轮正向转动实现前进效果,通过控制ω的大小控制速度,速度为V=-ωr。
1.2 控制系统
控制系统原理如图2所示。超声波传感器组检测障碍物距离机器人的距离li(i=1,2,…,5),则机器人中心到障碍物的距离LD=R+li(i=1,2,…,5),到目标坐标距离Lt=R+lt,lt为传感器到目标之间的距离。控制器(P89C52RA)[11]采用基于篮球比赛规则的模糊规则对传感器组输入信号进行分析,去模糊化后驱动左右两个电机运转,通过控制两个电机的角速度ω实现机器人的前进、后退和转向;同时,控制转向指示灯,前进时两指示灯均灭,后退两指示灯均亮,转向时对应的指示灯亮,从而显示当前机器人的运动状态。

图2 控制系统原理图Fig.2 Scheme of control system
2 机器人运动学分析
机器人运动分析如图3所示。机器人初始位置为坐标原点,机器人正前方为Y轴方向建立坐标系。机器人形心到障碍物的距离为Ld,与Y轴夹角为a,到目标点的距离为Lt,与与Y轴夹角为f。机器人在经历到第k个记录点Pk时位移为Sk,角位移为θk,则该点的坐标(xk,yk)为

图3 机器人运动分析Fig.3 Motion analysis for robot
(1)
设第k点到k+1点的位移为ΔSk+1,角位移为Δθk+1,则k+1点的坐标及相对于原点的角位移为
(2)
由此可知:在k点坐标已知的情况下,机器人在k+1点的坐标及相对于原点的角位移由ΔSk+1及Δθk+1决定;ΔSk+1=ΔTk+1Vk+1,k+1点的坐标由机器人速度Vk+1及角位移Δθk+1决定。因此,模糊系统最终的控制量为机器人速度V和角位移θ。
3 基于篮球比赛战术的模糊控制系统
模糊控制系统包括避障系统、目标引导系统、动作加权分析器和运动合成器4部分,如图4所示。
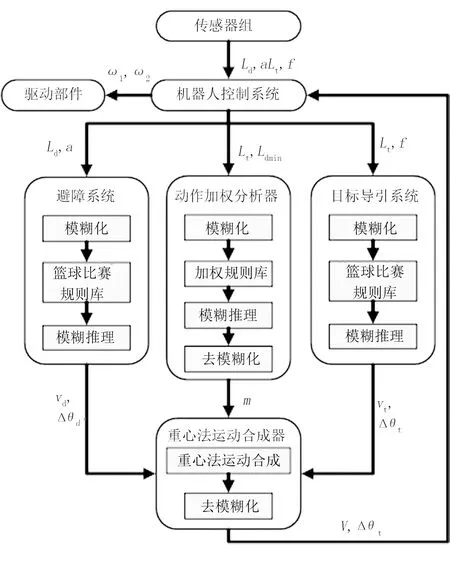
图4 模糊控制系统Fig.4 Fuzzy control evadible system
超声波传感器检测机器人当前位置与目标和障碍物之间的位置关系,得到距目标的距离为Lt、方向角f,到障碍物的距离为Ld、方向角为a,将信号传入机器人控制系统。避障系统输入量为两组到机器人最近的障碍物的距离为Ld和方向角a,输出为模糊化后的机器人速度vd与方向角该变量Δθd。目标导引系统输入量到距目标的距离为Lt、方向角f,输出为模糊化后的Vt与方向角该变量Δθt。动作加权系统的输入为距目标的距离Lt和最近的障碍物距离Ldmin,输出量为加权系数m。运动融合系统输入为避障系统和目标系统输出,将二者进行重心法拟合,去模糊化,输出机器人运动信号V、Δθ。运动信号返回控制中心,最终向两驱动电机发出转速信号,实现机器人的前进和转弯。
模糊控制器规则来自篮球比赛战术[12]:①避障系统规则库原理基于规避战术。当带球队员接近多个防守球员时,距离远时高速运球,向相防守队员运动的相反方向小角度转弯;距离中等时,中等速度运球避免被截断,向相防守队员运动的相反方向中等角度转弯,避开防守队员;距离近时,满速运球,确保控球,向相防守队员运动的相反方向大角度转身,避开防守队员。②目标导引规则即要时刻清楚知道对方篮筐位置。③运动合成规则库来源于过人战术,进攻队员分析离自己最近的防守队员位置和篮筐位置,进行加权综合分析,规划最优过人路径。
3.1 避障系统
避障系统的作用是让机器人在未知的环境下绕过障碍物继续前进。基于篮球战术制定规则库,取距离机器人最近的两组障碍坐标作为避障系统输入,即Ldi(i=1,2)、adi(i=1,2),输出为模糊化后的vd和θd。由于超声波传感器检测范围为2.5~200cm,因此Ldi中心值取N=50cm,M=100cm,F=150cm。隶属度函数如图5所示。其中心值取LL=-π/2,LM=-π/4,C=0,RM=π/4,RL=π/2;输出vd中心值取S=1.8km/h,M=3.6 km/h,F=5.4 km/h。θd隶属度函数中心值取LL=-π/2,LM=-π/4,C=0,RM=π/4,RL=π/2。

图5 避障系统隶属度函数Fig.5 Membership functions of evadible system
避障规则基于篮球战术,取距离机器人最近的两组障碍坐标作为避障系统输入,当机器人接近多个障碍物时,距离远时(Ldi≥150cm)采用高速F运动;距离中等(150cm>Ldi≥100cm)时,采用中等M速度;距离近时(Ldi<50cm),慢速S前进。规则如表1所示。
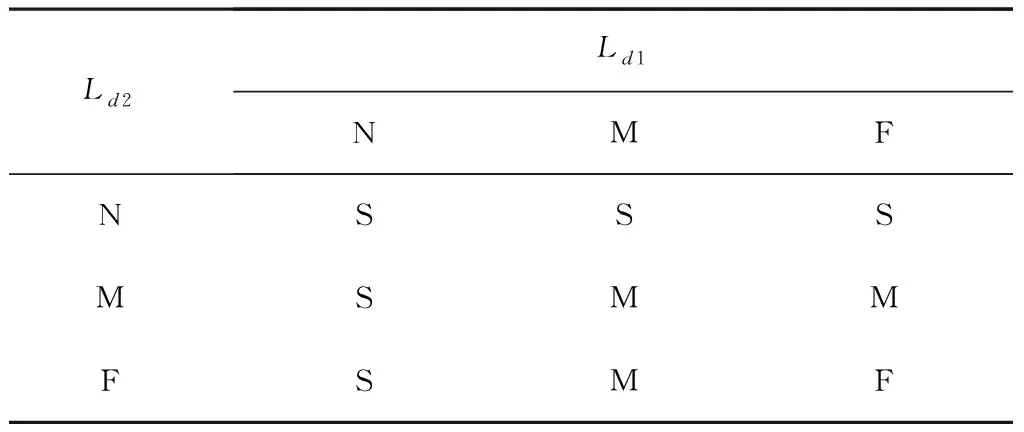
表1 vd模糊规则Table 1 Fuzzy rules for vd
机器人角位移θd规则如表2所示。当机器人正前方出现障碍时,向另一障碍物相反方向转动π/2;当障碍出现在前进方向同侧,机器人保持原有方向不变;当障碍出现在前进方向两侧最大角位置时,机器人保持原有方向不变;当障碍出现在前进方向两侧,且分别处于最大和中等位置时,机器人向最大位置转π/4。

表2 θd模糊规则Table 2 Fuzzy rules for θd
3.2 目标导引系统
目标跟踪系统为机器人的运动指明了方向,在机器人初始位置建立的绝对坐标系中,目标坐标已知。系统输入量为目标距离Lt和初始位置机器人正方向与目标位置夹角f,输出为模糊量vf和θf,隶属度函数如图6所示。其中,Lt中心值取N=50cm、M=100cm、F=150cm;f中心值取LL=-π/2、LM=-π/4、C=0、RM=π/4、RL=π/2;输出vf中心值取S=1.8km/h、M=3.6km/h、F=5.4km/h;θf中心值取LL=-π/2、LM=-π/4、C=0、RM=π/4、RL=π/2。
目标导引系统工作过程为:①以机器人初始位置建立绝对坐标系,设机器人前进方向为y轴;②确定目标坐标Pt(xt,yt);③机器人开始运动,确定自身坐标位置Pk(xk,yk),计算当前位置与标坐标Pt(xt,yt)的距离Lt和角位移f;④将距离Lt和角位移f进行模糊化处理,隶属函数如图6(a)和图6(b)所示;⑤输出模糊化vt和θt,如图6(c)和图6(d)所示。
模糊控制规则基于篮球比赛战术,当距离远时,采用高速运动;距离中等时,采用中等速度;距离近时,采用慢速运动,规则如表3所示。机器人角位移规则为相导向角f相反方向转动-f,规则如表4所示。

表3 vt模糊规则Table 3 Fuzzy rules for vt

表4 θt模糊规则Table 4 Fuzzy rules for θt
3.3 动作加权系统
避障系统输出vd和θd,目标导向系统输出为vt和θt,现需要确定两者在机器人的速度和角位移融合过程中的权重。动作权重系统的输入为机器人到目标的距离Lt和机器人到最近障碍物的距离Ldmin,中心值均为N=50cm,M=100cm,F=150cm;输出值为加权系数m,中心值为VS=0,S=1/4,M=1/2,B=3/4,VB=1。输入输出隶属度函数如图7所示,加权系数m的模糊规则如表5所示。

表5 加权系统规则μλTable 5 Fuzzy rules for μλ

图7 加权系统隶属度函数Fig.7 Membership functions of weight analysis system
3.4 动作融合系统
动作融合系统主要完成两大任务:①实现避障系统和目标导向系统输出的融合;②去模糊化,输出机器人的速度V和角位移Δθ。融合系统采用重心法,采用动作加权系统等到的加权系数m,衡量避障系统输出和目标导向系统在机器人运动的占比,来确定机器人的速度V和角位移Δθ。设vd和θd为避障系统输出,vt和θt为目标导向系统输出,则
(1)
(2)
4 系统测试
机器人越障碍测试路径如图8所示。中心线为机器人行走路径,虚线为机器人和目标之间的连线,黑色部分为障碍物,六边形为目标。在初始位置处,两障碍物根据避障规则,他们距离均为N,障碍物位于机器人正前方,障碍方向a为C和RM。目标在机器人正方向上,距离很远,根据目标导引规则,距离为F,目标方向f为C。根据加权融合规则,此时机器人速度V为1.8km/h,向左转向π/2。
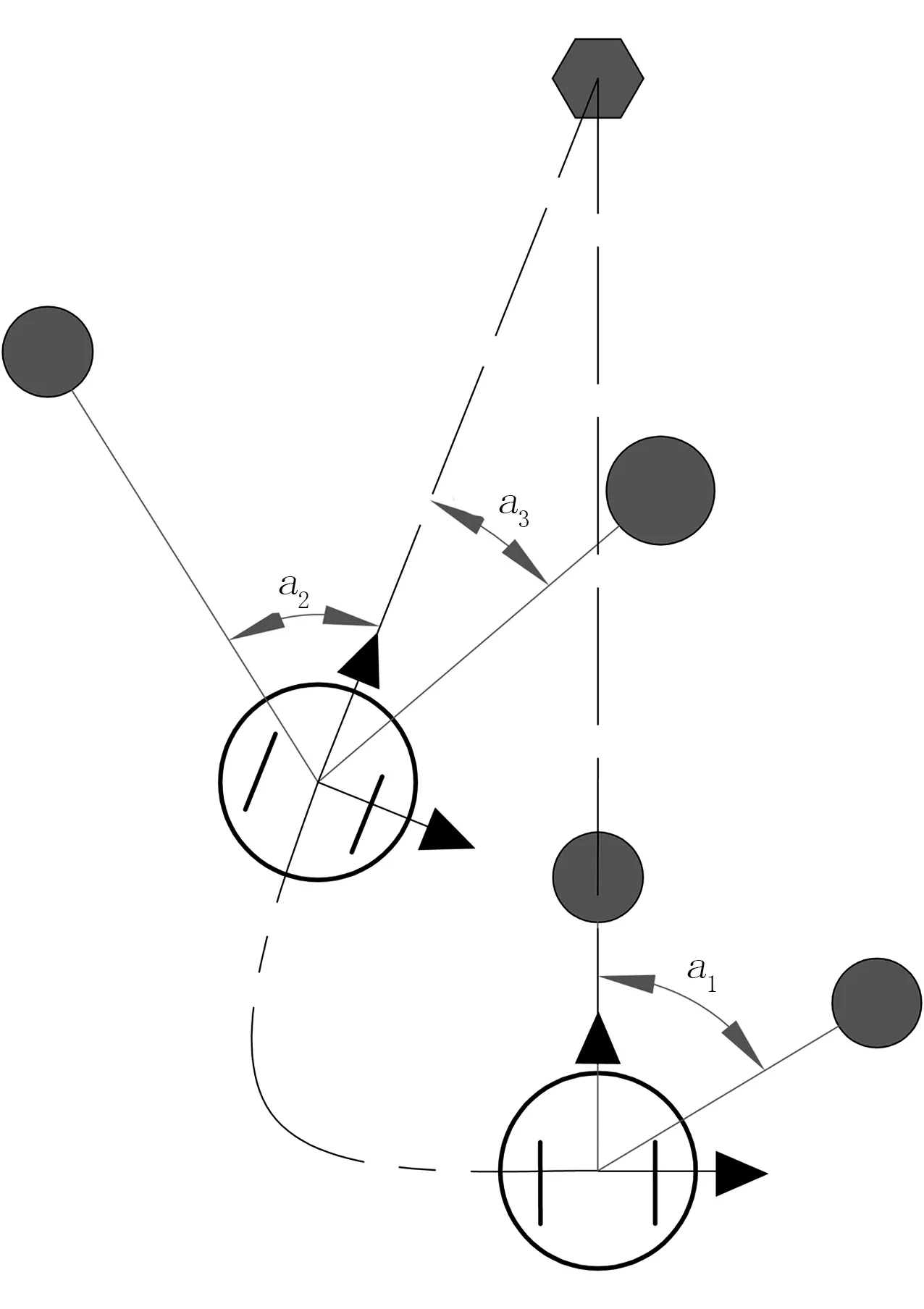
图8 机器人移动测试Fig.8 Test for robot moving
机器人处于位置2时,两障碍物距离均为M,障碍方向a为LM和RM;根据目标导引规则,距离为M,目标方向f为C。此时,机器人速度V为3.6km/h,不转向;此后机器人沿着虚线路径到达目标位置。
5 结论
为了提高采摘效率、实现采摘工作的自动化,设计了一种采摘机器人避障模糊控制系统,并基于篮球战术规则制定了模糊规则库。该系统共由4部分组成:①避障系统。该系统输入为距机器人最近的两组障碍物距离与角度,即Ldi(i=1,2),adi(i=1,2),输出为模糊化后的vd和θd。②目标导引系统。该系统输入量为目标距离Lt和机器人正方向与目标位置夹角f,输出为模糊量vf和θf。③动作加权系统完成目标导引与避障系统的权重分析,输入为机器人到目标的距离Lt和机器人到最近障碍物的距离Ldmin,输出值为加权系数m。④动作融合系统根据加权系数m完成目标导引与避障的融合,输入为模糊化后的vd和θd,以及模糊量vf和θf,输出为机器人的速度V和转角Δθ。系统检测发现,该系统具有良好的避障性能。
