五杆双作用马铃薯振动挖掘装置的设计与仿真
2020-10-17李亮亮李亚萍戚江涛蒙贺伟林元熙
李亮亮,李亚萍,戚江涛,蒙贺伟,刘 潇,林元熙
(1.石河子大学 机械电气工程学院,新疆 石河子 832000;2.农业部西北农业装备重点实验室,新疆 石河子 832000)
0 引言
随着我国马铃薯主粮化战略的启动,马铃薯种植面积不断加大,已成为继稻米、小麦、玉米之外的第四大主粮作物,预计种植面积将逐步扩大到1 亿hm2。因此,马铃薯产业对我国农业结构调整以及食品安全具有重要意义[1]。
目前,国内马铃薯收获机械,普遍存在牵引阻力和牵引功耗较大等突出问题[2]。究其原因,马铃薯收获机挖掘环节功率消耗大是重要的影响因素。为此,在现有固定式挖掘铲基础上,提出了一种五杆双作用振动挖掘装置。资料显示,通过振动可以有效降低挖掘装置牵引阻力,使土壤更加疏松[3-4]。国外学者M.Spekor用分段线性近似法研究了沿着切削方向振动的减阻机理[5]。国内学者吕金庆等人设计了4U1Z型振动式马铃薯挖掘机,并且对挖掘铲和振动分离筛机构进行运动学分析[6];文学洙等进行了振动参数对动力消耗的研究[7];史增录等进行了振动式马铃薯收获机动力学模拟和模态分析[8];贾晶霞等进行了马铃薯收获机摆动筛与块茎运动仿真分析[9];陈凯设计了一种以小四轮拖拉机为动力的振动铲式马铃薯挖掘机,并进行了仿真[10]。
目前,振动挖掘技术多数基于马铃薯分离筛运动学分析和理论力学建模研究,而针对挖掘铲运动学仿真研究较少,对于振动减阻技术机理、挖掘形式及挖掘轨迹等需进一步研究。为此,基于以上研究成果,提出了一种五杆双作用振动挖掘装置。该装置在挖掘过程中不仅在前进方向上产生振动,而且垂直于前进方向上也会产生振动。垂直于前进方向的振动会给土壤一个垂直于地面的作用力,使土壤与挖掘铲接触力最小,从而达到减阻的目的。同时,在结构设计的基础上,分析了挖掘铲的轨迹与运动特性,得到了该挖掘铲的理论轨迹;通过建模并利用Adams软件对机构进行运动学仿真[11],确定了该挖掘铲的运动学特性;最后,通过试验验证该装置的可靠性,旨在为振动挖掘铲减阻机理奠定一定的基础[12]。
1 装置结构及工作原理
1.1 装置结构
五杆双作用振动挖掘装置主要包括机架、连杆、偏心轮、挡土板、长摇杆、挡土板、短摇杆、滑切刀、三角挖掘铲、筛条、动力传输装置和挂接装置,如图1所示。连杆和偏心轮对称安装在机架两边,两偏心轮通过连杆驱动振动挖掘铲;挖掘铲的前部有滑切刀,在五杆双作用振动挖掘装置工作时可以起到切碎杂草作用,还可以切碎部分土壤。该装置结构简单,入土、碎土作用明显,主要参数如表1所示。
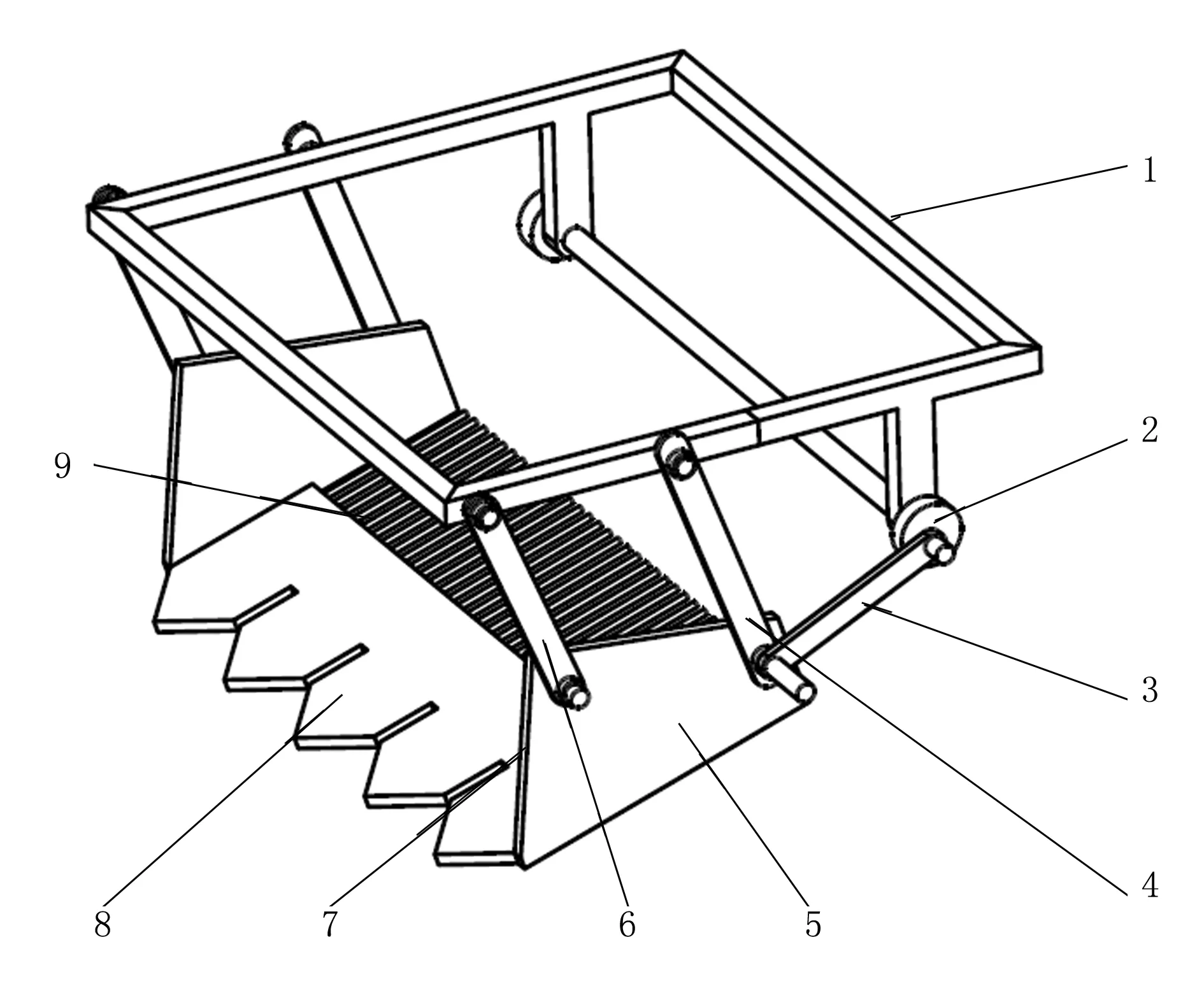
1.为机架 2.偏心轮 3.连杆 4.长摇杆 5.挡土板 6.短连杆 7.挡板滑切刀 8.三角形挖掘铲 9.筛条
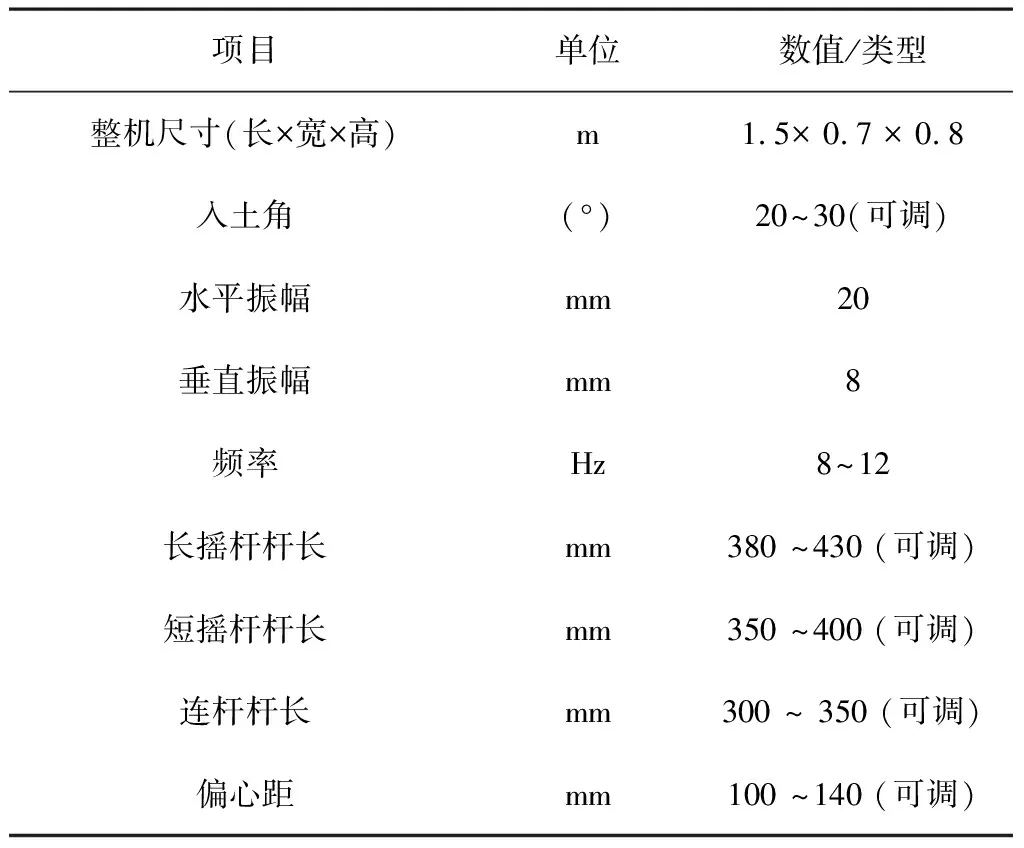
表1 装置参数表
1.2 工作原理
工作时,由拖拉机牵引前进,拖拉机传动轴连接变速箱,变速箱经过换向以后,通过链轮将动力传输给偏心轮;偏心轮带动机架两边对称安装的连杆以机架四个铰接点为转动中心,使振动挖掘铲沿着前进方向前后摆动;同时,振动挖掘铲还以长连杆低端为转动中心,垂直于前进方向上下摆动。因此,该装置在前进方向和垂直于前进方向上都以固定的振幅做简谐运动,从而实现马铃薯收获过程中的双作用振动挖掘土壤。
2 机构运动学分析
挖掘铲运动轨迹为两摇杆绕着摆动臂铰接孔圆弧的往复摆动。偏心振动装置实质为一个6杆机构,在此6杆机构中,采用解析法中的封闭矢量多边形法对工作系统进行运动分析[13-14],采用如图 2所示坐标系,建立挖掘铲的运动分析[15]。根据两个封闭图形ABEA及BCDE,可得
l1=l6+l5
(1)
l2+l6=l3+l4
(2)
将上式写成投影方程,得到
l1cosθ1=l6cosθ4+l5
(3)
l1sinθ1=l6sinθ4
(4)
l2cosθ2+l6cosθ4=l3cosθ3+l4
(5)
l2sinθ2+l6sinθ4=l3sinθ3
(6)
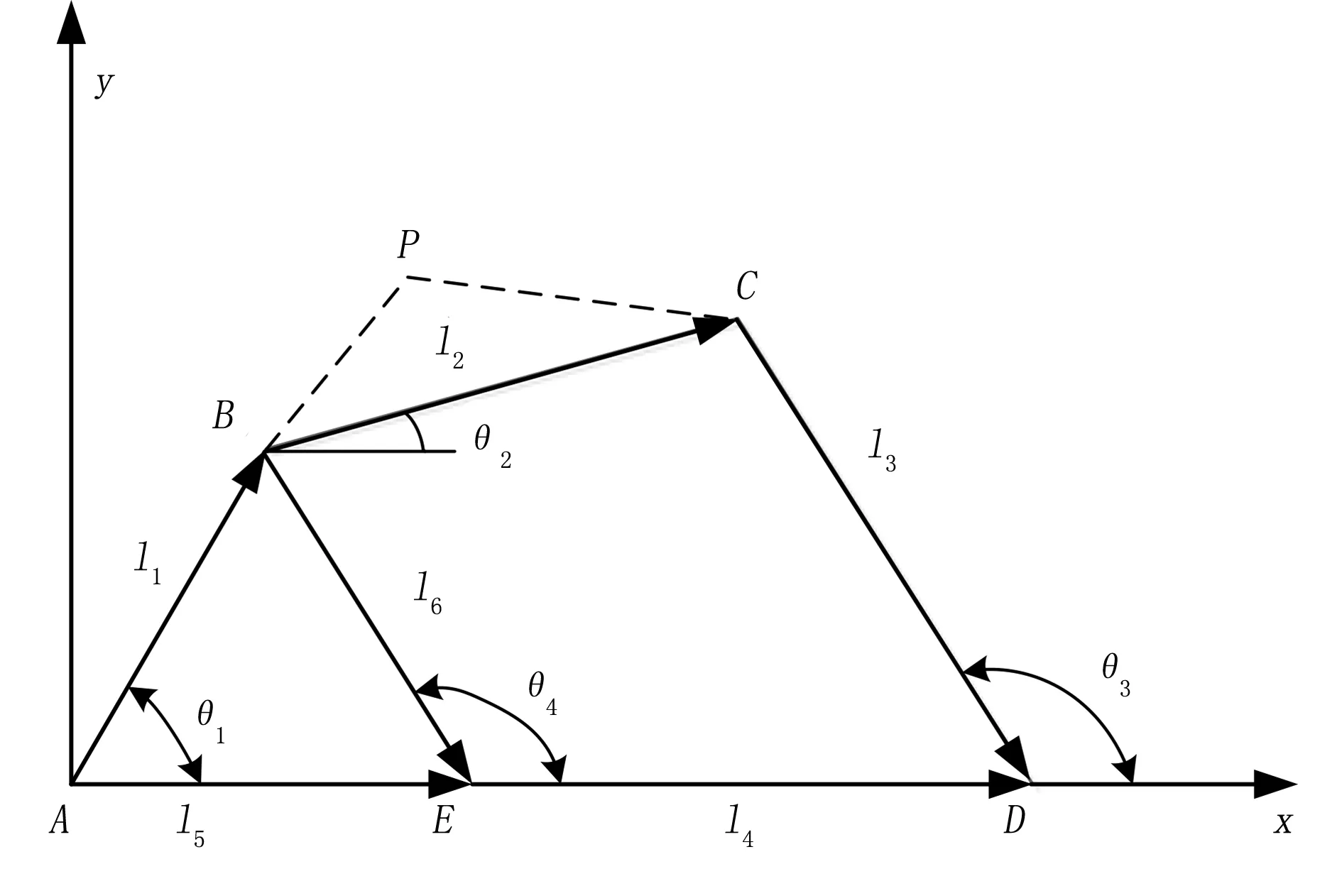
图2 六杆机构封闭矢量多边形
2.1 挖掘铲的轨迹方程
联立式(1)和式(2),可得

联立方程(5)、(6),两边平方然后相加,可得

设拖拉机前进车速为V0(mm/s),则在分离筛工作时,经过时间t(s),其上任一点P的位移
Spx=l6cosθ4+lpbcos(θ2+∠PBC)+V0t
(7)
Spy=l6sinθ4+lpbcos(θ2+∠PBC)
(8)
其中,lpb为P和B点之间的距离;V0为初速度,即拖拉机速度;t为时间。
2.2 挖掘铲的速度方程
由位移方程(7)、(8)可以看出:振动机构在水平方向上做类似于余弦函数线的运动,垂直方向上做类似于正弦函数线的运动。对方程(3)、(4)角位移求导,可得
(9)
对方程(5)和(6)角位移求导,可得
则挖掘铲的速度方程为
Vx=ω6l6cosθ4+ω2lpbcos(θ2+∠PBC)+V0
(10)
Vy=ω6l6sinθ4+ω2lpbcos(θ2+∠PBC)
(11)
2.3 挖掘铲的加速度方程
对方程(9)继续求导,可得杆6角加速度方程为
对方程(10)、(11)继续求导,求得杆2和杆3的角加速度方程为
l3sin(θ3-θ2)
l2sin(θ2-θ3)
因此,挖掘铲铲尖任意一点P的加速度方程为
(12)
(13)
由上述分析可知:挖掘铲运动过程中,铲尖处任意一点的轨迹以固定的振幅做简谐运动,运动轨迹为正余弦函数图像,且速度和加速度也有类似的变化趋势。这说明,挖掘铲运动轨迹明确,运行状态正常,振动挖掘运动可靠性好。
3 运动学仿真及结果分析
3.1 几何建模
装置偏心轮机构参数决定了挖掘铲的运动规律,因此根据建立的挖掘铲及偏心轮机构仿真模型,对其进行仿真并进一步确定运动参数。将SolideWorks实体模型的数据格式转换为Parasolid(*.x-t)格式,通过ADAMS/Import模块导入ADAMS中,重新建立完整的几何实体模型[16-18]。
3.2 添加约束
将相应的约束添加到各构件,以限制构件之间的部分相对运动,并以此将不同构件连接起来组成一个机械系统[19-20]。动力MOTION-1由偏心轮轴输入,转速选择50d*time带动偏心轮旋转,通过连杆使挖掘铲绕机架铰接点振动。添加具体约束情形如表2所示,ADAMS中添加约束后如图3所示。
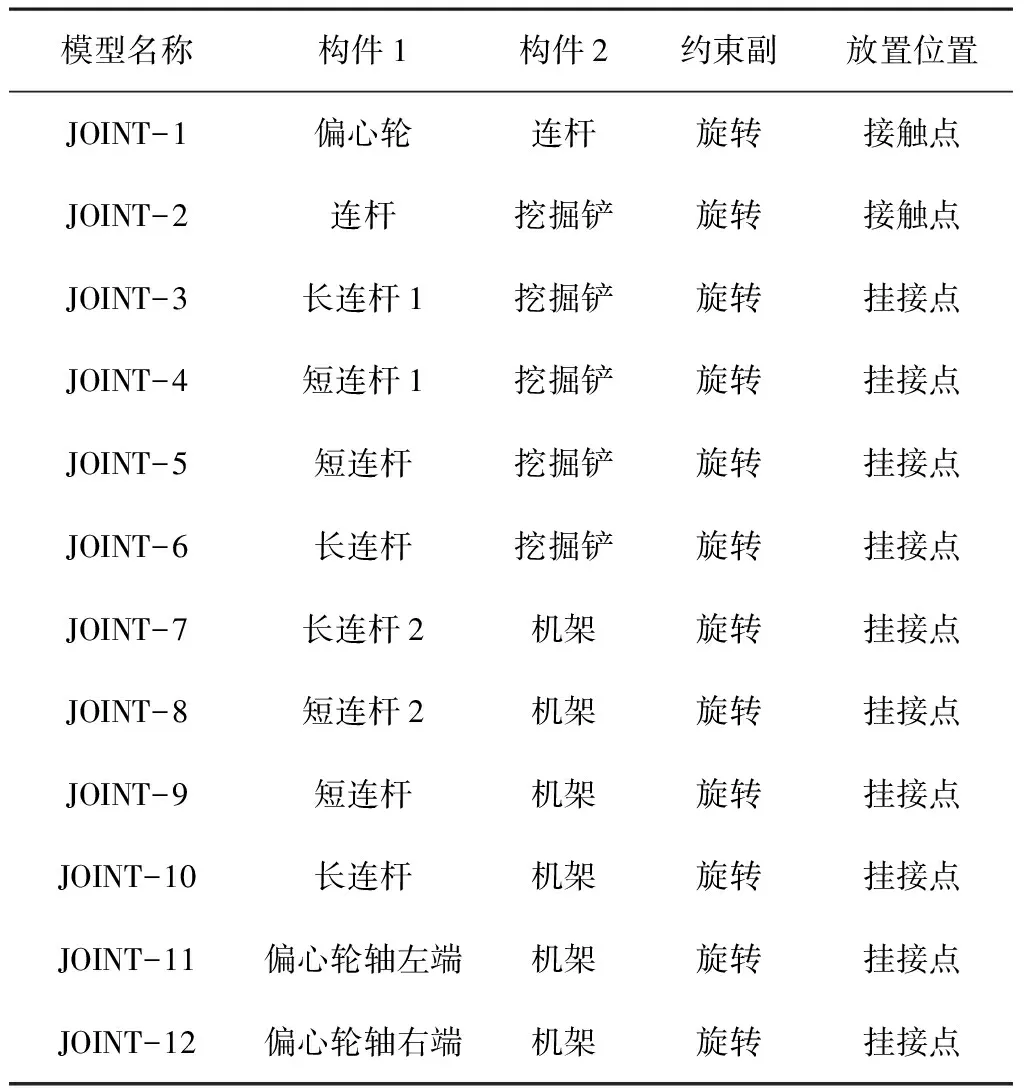
表2 各杆件运动副添加表
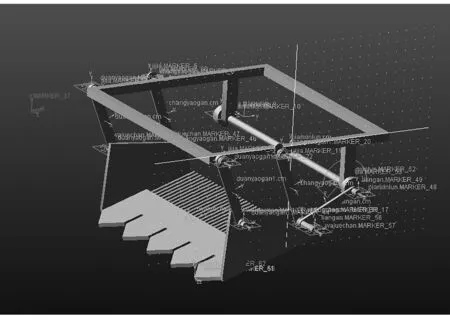
图3 Adams建模
3.3 仿真结果
为保证仿真分析顺利进行,仿真前利用模型自检工具对样机模型进行最后检验,排除建模过程中隐含的错误。自检后,点击Simulation进行仿真,终止时间为20s,仿真步长为50;然后,点击开始仿真按钮,进行仿真,观察模型的运行情况,结果如图4所示。
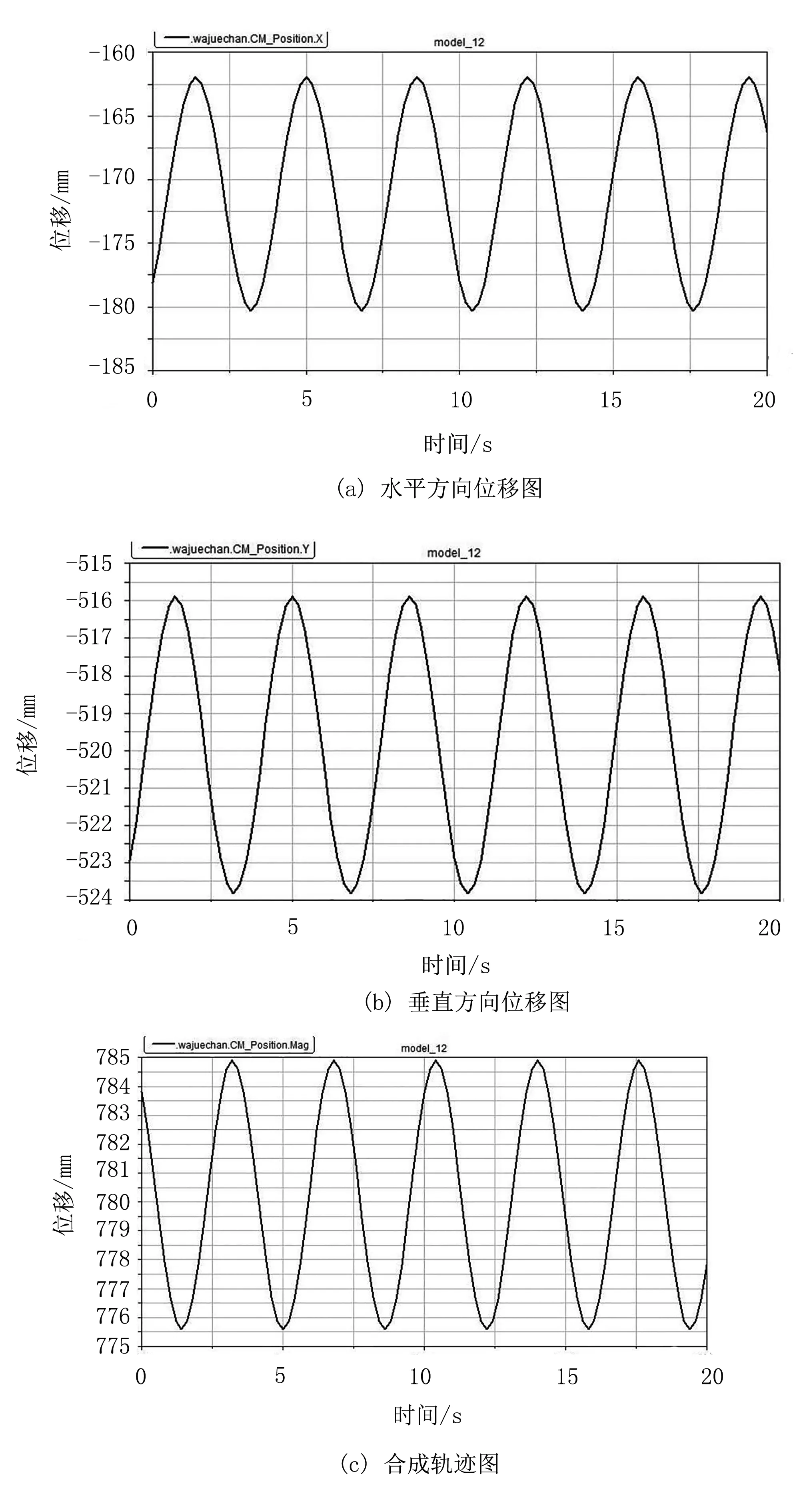
图4 无前进位移有振动仿真图
由图4(a)可知:水平位移从-161.5 mm变化到+181.5mm,振幅为20mm,轨迹曲线平滑,无干涉现象,满足一般小型马铃薯振动挖掘铲的振幅要求。挖掘铲在向前运动时连杆受到压力,最大位移为-161.5mm处,达到最远端,相应的摇杆转角最大;同理,挖掘铲回复原位时,连杆受到拉力,挖掘铲通过摇杆绕机架挂节点转动,当转角最大时,挖掘铲运动到最大位移处,完成1个周期的运转。
由图4(b)可知:垂直振幅在-516mm到-524mm之间变化,振幅为8mm,垂直振幅较小,一方面起到了振动碎土的作用,另一方面垂直振幅太大,将增加杆件结构强度。因此,本文所涉及五杆振动挖掘铲既可以实现水平方向上的振动,又可以实现垂直方向上的振动。
由图4(c)可知:挖掘铲轨迹曲线平滑,不存在轨迹突变现象。这说明,振动挖掘铲在水平振动和垂直振动合成时,能够运行良好,工作可靠。由此可见,五杆双作用振动挖掘铲在水平和垂直方向上分别以20mm和8mm为振幅做简谐运动。
由上述分析可知:无前进位移、有振动时,仿真与理论分析结论一致。
进一步模拟挖掘铲真实田间运行情况,给机架与大地之间添加移动副JOINT-13,在此移动副上面添加MOTION-2,施加移动驱动力,速度为10d*time,在挖掘铲自身往复振动的同时,随机架以一定速度前进。图5(a)、(b)、(c)分别为其运动状态下的位移、速度和加速度曲线。
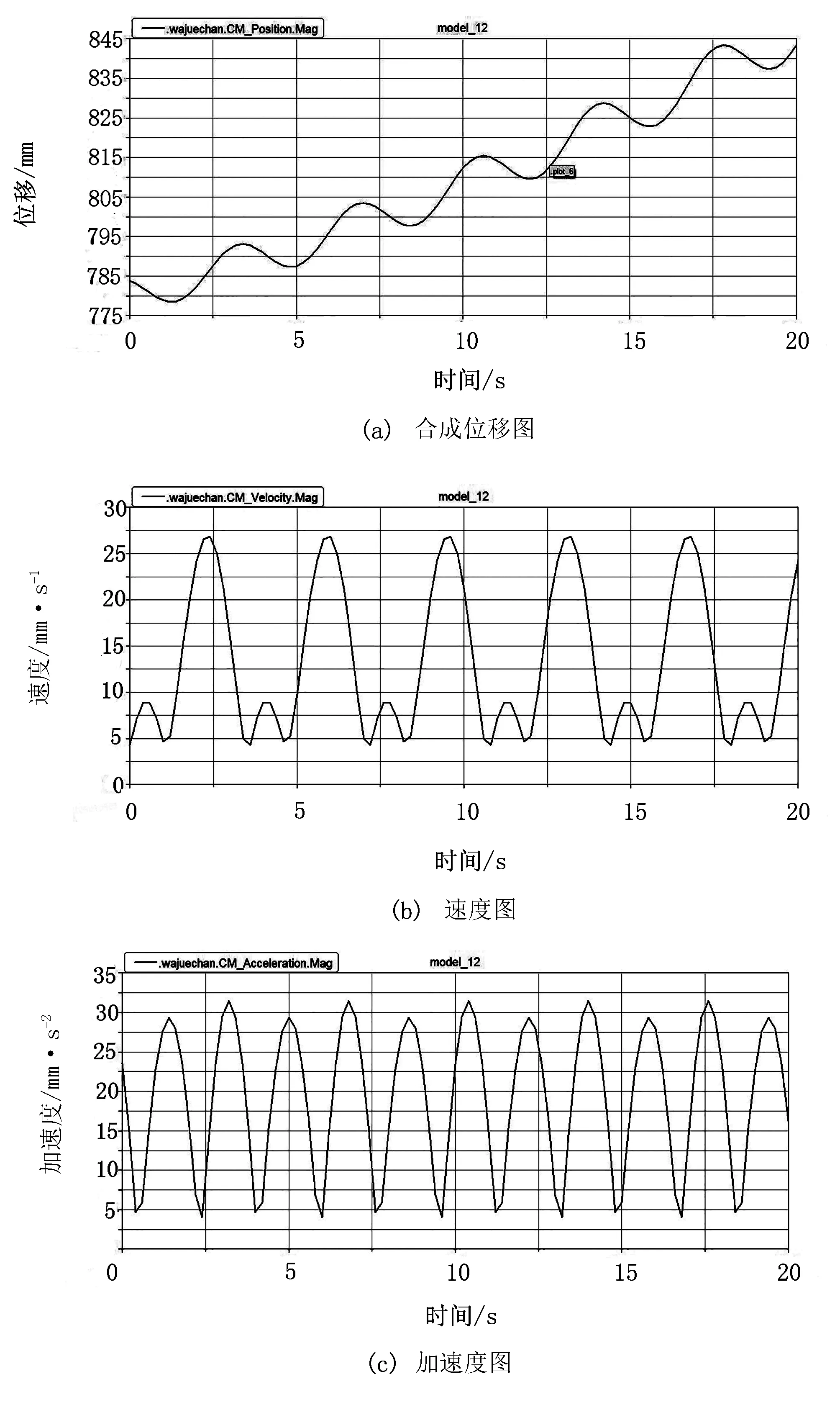
图5 有前进位移有振动仿真图
由图5(a)可知:仿真20 s时,挖掘铲随着机架由780 mm前进到845 mm,位移为65 mm,而振动挖掘铲仍以固定振幅做往复运动,运行互不影响,整个轨迹运行平稳,达到了振动挖掘目的。由图5(b)机构速度图像可知:挖掘铲运行1个周期内,会发生两次加速和减速。其中,第1次是挖掘铲受曲柄驱动拉力时,挖掘铲由此刻运动到最大位移处,速度先增大后减小,此后会进行加速;当挖掘铲运动到对称最大位移处时,又会进行减速,速度降到最小值,如此往复循环。由图5(c)加速度图像可知:在1个周期以内,加速度也会经过两次加速和减速,与速度图像变化相对应。加速度变化均匀,作用力均匀,挖掘铲运行平稳。
4 五杆双作用振动挖掘装置试验
2018年8月,在新疆维吾尔自治区石河子市五宫村进行试验,配装置套动力采用铁牛654拖拉机,选取试验用地面积1hm2,地势平坦,土壤为灰漠土,其含水率为16.5%~19.2%。试验情况如图6所示。结果表明:本设计的五杆双作用振动挖掘装置可以实现双作用振动挖掘,且碎土性能良好,工作可靠,达到了设计要求。
5 结论
1)通过对五杆机构进行设计与理论计算,得到了挖掘铲的轨迹方程、速度方程和加速度方程,获取了挖掘铲在水平方向和垂直方向上的正余弦函数轨迹曲线。
2)通过对五杆机构进行三维建模和运动仿真,得到了五杆振动挖掘铲在水平和垂直方向上分别以20 mm和8 mm为振幅进行振动,振动挖掘铲在水平振动和垂直振动合成时,能够实现双作用振动挖掘。通过模拟实际运行轨迹,给机架添加前行动力,得出振动挖掘铲运行平稳,不存在轨迹突变现象。理论与仿真分析显示:机构可以实现振动挖掘,通过田间实验,五杆双作用振动挖掘装置在前进方向和垂直于前进方向振动明显。由此表明,该装置工作可靠,碎土性能良好,达到设计要求。