超声速炮射飞行器控制面故障数值诊断方法
2020-10-12余奕甫
余奕甫,王 兵,王 强,金 鑫
(1 清华大学航天航空学院, 北京 100084; 2.中国航天空气动力技术研究院, 北京 100074)
对于超声速炮射飞行器而言,鸭式气动布局在发动机等其他条件相同时会比常规布局获得更好的机动性。鸭翼在飞行器上升阶段通过调整姿态从而增加升力使得飞行器迅速拉升,从而提高飞行器的机动性能,但是如果鸭翼调整的角度过大,会在前方形成一个巨大的雷达反射面[1-4]。对于炮射飞行器,一般出口Mach数可以达到Ma=5~6,对于控制面结构强度要求较高,发射和巡航阶段容易出现控制面损坏的问题[5-10]。
本文对于鸭式气动布局的超声速炮射飞行器飞行试验过程中出现的翼、舵严重损坏问题,开展飞行器全模型流场的数值模拟。通过分析数值模拟结果找出弹翼、尾舵损毁原因,为设计阶段改进弹翼、尾舵布局提供气动数据支持和改进建议。通过CAD建模得到飞行器计算数模,采用数值模拟程序得到飞行器若干攻角飞行状态下的流场结构,对弹翼、尾舵附近流场出现的流动结构进行流场分析,获取模型局部如端头、弹翼、尾舵等区域的边界层流动结构、压力分布、激波位置等流动参数,特别对于极限情况如小攻角飞行状态下,通过提取流场局部结构信息,获得战术飞行器计算模型的气动布局特征。
1 计算模型及试验状态
用于流场诊断的计算外形为初步设计的超声速炮射飞行器标准模型,如图1所示,标模基本参数如表1所示。

图1 鸭式布局炮射飞行器标准外形示意图

表1 标模基本参数
其中,Sr为计算模型的参考面积,L1为鸭翼展长,L2为尾舵展长。
计算工况与试验状态保持一致,来流Mach数为Ma=5,计算高度H=0 km、1.4 km、4.5 km,表2给出了计算工况的攻角及侧滑角:

表2 单个高度气动力计算姿态
2 数值方法及计算要求
在本文超声速流场的数值模拟中,对可压缩湍流的模拟采用基于Reynolds平均的N-S方程[11]。
2.1 流动控制方程
三维积分形式的雷诺平均N-S方程:

时间推进采用隐式LU-SGS法,N-S方程经过空间离散后在每个网格单元上转化为一个关于时间的一阶常微分方程组。这些常微分方程组沿时间进行求解通常采用显式方法或隐式方法。隐式时间推进方法在全流场可取较大的时间步长,稳定性好,计算效率高。LU-SGS方法在三维情况下无条件稳定,而且在三维求解时只需要对L和U进行两次扫描和标量求逆,具有计算量小,稳定性好等优点。
以有限体积法构造空间半离散格式[12],粘性项采用中心差分格式离散,无粘项采用Roe平均迎风通量差分分裂格式(FDS)离散,通过网格单元的i方向通量可以表示为:

2.2 湍流模型
湍流黏性系数由下式计算
其中,d为距离固壁的最短距离;v为分子运动粘性系数,
g=r+Cw2(r6-r)
ft2=Ct3exp(-Ct4χ2)
这里,Ω为涡量,方程中用到的常数为:κ=0.41,Cb1=0.135 5,Cb2=0.622,σ=2/3,Cv1=7.1,Cw1=3.24,Cw2=0.3,Cw3=2.0,Ct1=1,Ct2=2,Ct3=1.1,Ct4=2。
2.3 边界条件
1) 远场边界
战术炮弹飞行过程中远场边界应该在无限远处,但CFD数值模拟定义的远场不可能无穷远,只能取一个有限远的边界作为远场。这就要求空气介质在绕飞行器运动时产生的扰动波不会通过远场边界传递到场内。远场边界是假定边界附近为局部一维流动,根据特征线理论,利用一维流动中的两个黎曼不变量来处理法向流动,两个切向流动通过流场内部变量向外插值获得[13-15]。这样就保证了扰动波在有限远的边界上不会被反射回流场内。此次计算定义远场边界条件为压力远场。
2) 物面边界
外流计算时,物面是引起流场扰动的根源,准确模拟物面条件是各种网格和空间离散需要解决的问题。物面采用无滑移条件(即u=v=w=0)、绝热壁及法向零压力梯度条件。
2.4 计算网格
根据战术炮弹流场分析要求,对1∶1计算模型进行了网格生成与数值模拟分析,利用ICEM生成带附面层精细非结构网格,如图2~图4所示,计算采用全模,法向第一层网格高度2×10-5m,边界层网格增长率1∶15,对于整个弹体边界层内的流动现象模拟完全满足使用精度的要求,网格总数量达到805万。利用有限体积法对流场空间进行求解。

图2 炮射飞行器外形全局网格图

图3 炮弹外形表面网格图
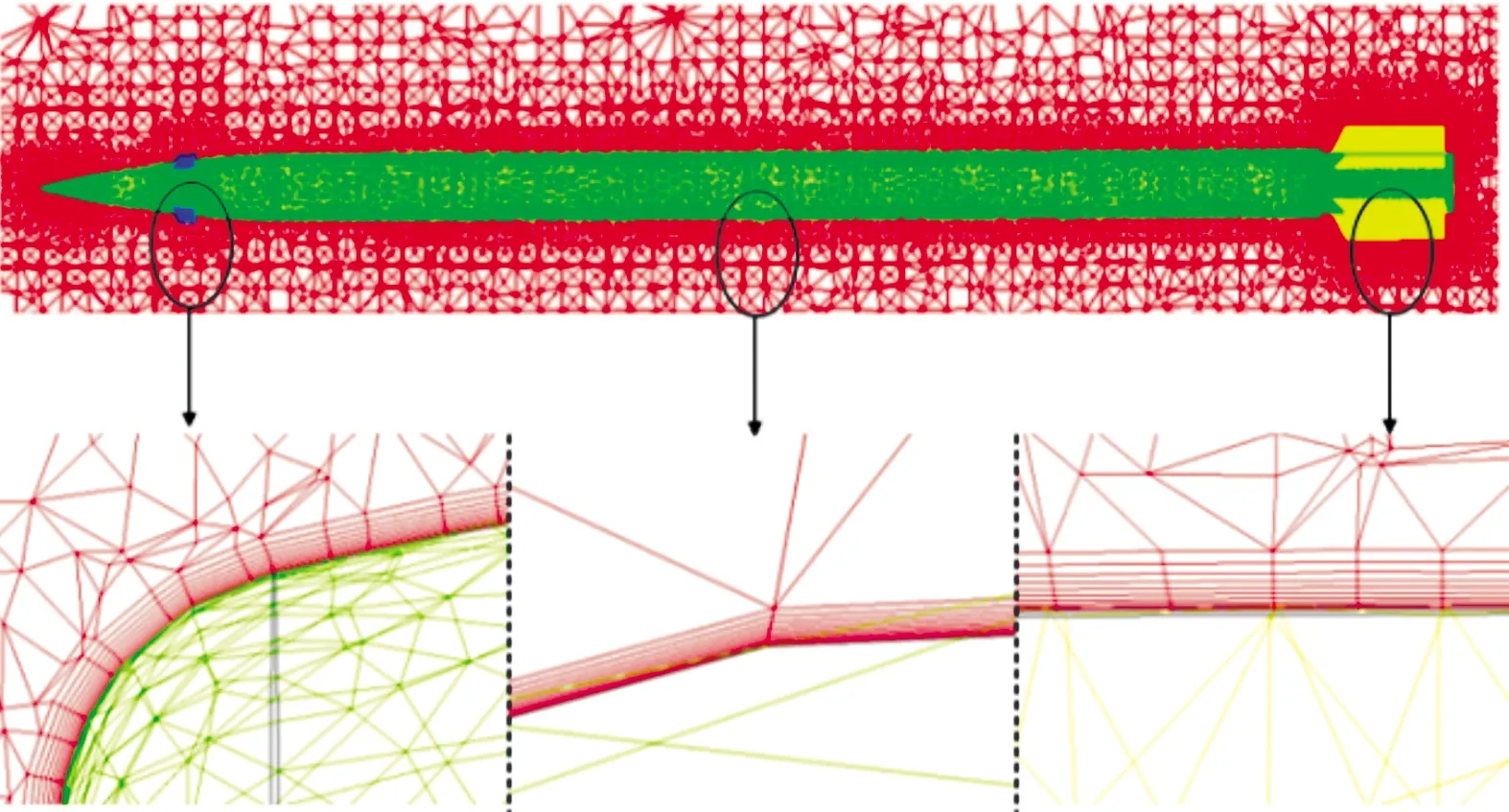
图4 炮弹外形壁面边界层网格图
3 数值模拟结果及分析
本文对3种海拔高度条件下战术炮弹的Ma=5飞行空间流场进行建模计算,并对低海拔高度(H=0)的计算结果进行分析。表3给出了不同攻角飞行条件下鸭翼、尾舵前后表面压力差值,图5是部分攻角端头、鸭翼、尾舵的流场结构图。

表3 弹体控制面前后表面压力差
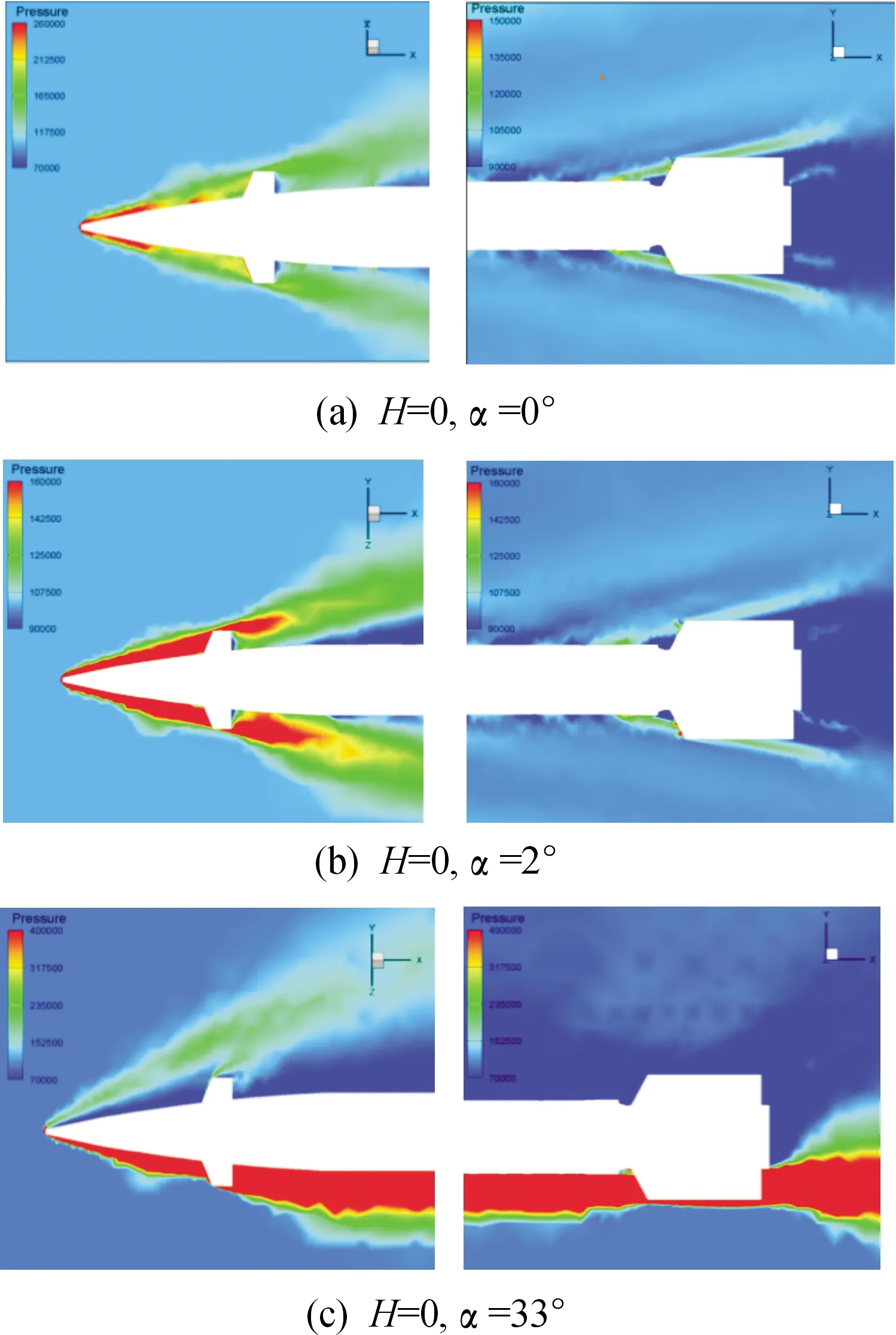
图5 计算模型头部、尾部流场压力分布切面图
从图表可知,战术炮弹小攻角飞行过程中头部激波直接作用在鸭翼区域,使得鸭翼前表面存在一个高压区,超声速飞行时产生的气动力效应对鸭翼的舵机结构产生巨大的冲击力,鸭翼结构前后静压差明显。以H=0高度的飞行状态的计算结果为例,鸭翼前后表面最大压力差达到5.4 kN(一般舵机结构的设计承力上限为200 kg),远远超出舵机的最大承力范围,是造成鸭翼控制面故障的根本原因。同理,对于尾舵附近流场结构,如图表所示,尾舵前后表面最大压力差达到10.1 kN,由尾舵前部毗邻的弹体结构引发的激波直接作用在尾舵区域,对尾舵结构产生极大的冲击力,最终导致六片尾舵故障。
图6给出了炮射超声速弹全弹空间流场表面压力分布,可见小攻角飞行姿态下弹体区域流动结构清晰,激波位置相对攻角变化不大,激波干扰是造成鸭翼、尾舵故障的主要原因。

图6 计算模型全弹表面压力分布云图
4 结论
通过数值模拟与流场分析,对比来流Mach数Ma=5时不同攻角、不同海拔高度计算条件下炮射超声速飞行器的空间流场结构,可得如下结论:
1) 在3种海拔高度条件下,Ma=5时,沿弹体轴线方向计算得到的激波结构清晰,从端头至尾翼,依次有3道强激波,其中头部激波直接作用在弹翼结构上,弹体后段激波直接作用在尾翼结构上。
2) 在3种海拔高度、Ma=5的条件下,该战术炮弹的失速攻角大于45°,对于小攻角状态,不存在非定常分离流,绕弹体流动结构稳定,激波位置预测准确,流场分析具备参考价值;对于大攻角状态,由于大攻角分离效应严重,存在较强的激波边界层干扰,绕弹体结构的非定常流动结构紊乱,不能准确预测弹翼、尾翼的真实受力,故计算结果不适用于故障分析。
3) 对于低海拔、中海拔、高海拔3种飞行环境,小攻角条件下的海拔高度直接影响模拟结果的压力分布区间,对于绕弹体流动结构的影响不大,激波在弹体轴向分布位置几乎没有变化;对于大攻角情况,海拔高度影响失速区间,从计算结果可知,3种海拔高度条件下,当α=45°时,绕弹体流动没有发生分离,当α≥55°时,绕弹体流动发生分离。特别的,当海拔高度H=4 500 m时,α=55°时,绕弹体空间流动发生分离,出现不稳定的非定常流动现象。
4) 在小攻角状态,3种海拔高度条件下,通过计算流场分析可知,头部激波结构对于弹翼结构的影响是造成弹翼故障的主要原因;弹体后段激波结构对于尾翼结构的影响是造成尾翼故障的主要原因。
5) 在飞行Mach数M=5的小攻角状态下,沿着流向方向,弹翼结构前后位置静压差较大(最大压力差达到10.1 kN),产生作用于弹翼表面的瞬间气动冲击力巨大,可能对舵机结构产生破坏性影响。
通过数值模拟的结果,对于弹体控制面的改进建议如下:
1) 对于高超声速战术炮弹,考虑舵机承力结构特点,控制面可采用栅格舵,一方面减少飞行时的舵面阻力,另一方面也能降低舵面故障风险,缺点是控制效率不高,需要较长时间完成姿态控制;
2) 可根据流动结构特征的分布位置(如激波位置、激波边界层干扰区),结合总体设计,调整控制面位置,避开流动结构强作用区域,增加控制面控制效果,从而降低故障风险。
