无人机辅助的NOMA网络用户分组与功率分配算法
2020-10-11李国权林金朝徐勇军黄正文刘挺
李国权,林金朝,徐勇军,黄正文,刘挺
(1.重庆邮电大学通信与信息工程学院,重庆 400065;2.光电信息感测与传输技术重庆市重点实验室,重庆 400065;3.西安邮电大学陕西省信息通信网络及安全重点实验室,陕西 西安 710121;4.布鲁内尔大学电子与计算机工程系,伦敦 UB8 3PH)
1 引言
面对重大自然灾害和紧急突发事件,有效的应急通信对于提高救援效率和保障人民生命安全具有重要的意义。当发生事故或灾难时,当地的固定基站通常不能正常使用,而下一代通信系统中的无人机(UAV,unmanned aerial vehicle)具有更好的灵活性[1],特别是对于偏远地区或缺乏基站设施的地区,应快速构建无人机空中基站。因此,无人机为有序应对突发事件,尽可能地降低其危害程度做出了重要的贡献[2]。针对应急通信场景下频谱资源稀缺及基站毁坏的问题,提升无人机系统的频谱效率具有重要意义。
非正交多址接入(NOMA,non-orthogonal multiple access)技术具有较高的频谱效率与较好的公平性,被视为5G乃至下一代无线通信系统的关键技术[3-5]。在功率域NOMA系统中,信道条件好的用户被分配较低的功率分配因子,而信道条件差的用户被分配较高的功率分配因子。在接收端,利用串行干扰消除(SIC,successive interference cancellation)技术来消除部分用户的干扰,实现更多用户在同一时频域复用,从而提升频谱效率[6]。
将NOMA引入无人机通信系统,能够充分利用功率域资源,从而保证空中基站为地面用户更好地传输信号(下行链路)或者保证空中无人机为地面用户更好地传输信号(上行链路)。无人机系统主要受到视线(LoS,line of sight)链路的影响,所以传统的瑞利衰落不适合表示其信道特性[7]。
关于UAV-NOMA系统的研究,按照信道特性分类,主要有空对地(A2G,air to ground)信道、Nakagami-m衰落信道、路径损耗信道和莱斯信道。针对考虑A2G信道的UAV-NOMA系统,文献[8]研究了不同城市环境下的和速率最大化问题,同时对比了固定与动态UAV高度的影响,从而减少能耗。在相同的模型下,文献[9]考虑了多用户服务质量约束,将能效最大化问题等效为非线性分式规划问题,其中基于信道条件的用户分组方案被考虑。针对考虑Nakagami-m衰落信道的UAV-NOMA系统,文献[10]提出了以UAV为中心的卸载操作策略和以用户为中心的应急通信策略,分别适用于密集网络与需要同时服务所有用户的场景,从而提升系统覆盖概率。文献[11]则考虑了LoS链路与非视线(NLoS,non-line of sight)链路的影响,利用随机几何模型来模拟用户与UAV的位置,并且推导了系统中断概率与遍历速率的闭式表达式。针对LoS链路与NLoS链路场景,文献[12]首先根据访问优先级确定用户分组方案,再利用消息传递算法进行子信道分配,最后联合优化UAV-NOMA系统的发射功率。文献[13]则研究了相同模型下的多个旋转无人机辅助的上行NOMA系统,并提出了基于K均值的UAV部署方案和基于坐标的用户分组方案。同时,考虑了最小服务质量约束,联合优化基于总功率最小化的资源分配问题。结果表明,UAV-NOMA系统的频谱效率和能量效率得到有效提升[12-13]。针对考虑路径损耗模型的UAV-NOMA系统,文献[14]考虑了最小可达速率需求,研究了联合UAV位置与功率分配优化问题来减小发射功率。文献[15]研究了联合UAV位置、接纳控制与功率分配优化问题,利用惩罚函数法与连续凸逼近法来求解卡罗需-库恩-塔克(KKT,Karush-Kuhn-Tucher)收敛点,从而提高UAV-NOMA系统的用户接入数。此外,文献[16]将无人机引入车联网,利用对偶分解法,通过联合优化链路切换次数与链路传输速率来提高UAV-NOMA系统吞吐量。针对考虑莱斯信道的UAV-NOMA系统,文献[17]考虑了上行干扰消除约束,研究了联合UAV位置、地面基站位置、预编码优化问题,从而提升地面用户的和速率。在相同的信道模型下,文献[18]研究了上行UAV-NOMA系统的预编码优化问题,考虑了SIC约束和速率需求约束,利用一阶泰勒展开将上述优化问题转化为二阶圆锥规划问题,从而提升系统和速率。文献[19]研究了总发射功率约束、总带宽约束、UAV高度约束、天线波束宽度约束条件下的最大最小速率优化问题,利用路径追踪算法求解,得到有效的UAV-NOMA系统和速率提升。此外,文献[20]研究了UAV旋转轨迹的优化问题,从而降低了下行UAV-NOMA系统的中断概率。
上述关于UAV-NOMA系统的工作大多只考虑UAV高度、位置、轨迹的影响,而缺乏对地面用户分组与功率分配联合优化问题的研究。因此,本文主要研究UAV-NOMA系统中的动态用户分组与功率分配算法,利用图论中的最大割定理与辅助变量法,使UAV-NOMA系统的和速率性能得到较好的提升。本文主要贡献如下。
1)在下行单小区多组场景下,建立了一个基于无人机辅助的NOMA通信网络模型,其中一个无人机作为空中基站,服务多个地面用户,而这些地面用户被均分到多个组。传统的UAV-NOMA系统通常假设每组用户数为2,即每组只包含一个近用户和一个远用户。为了更符合实际,本文所提的UAV-NOMA系统将考虑组内用户数更多的情形。
2)为了进一步提升UAV-NOMA系统的频谱效率,考虑了基站最大发射功率约束与用户分组约束,构建了基于多用户和速率最大化的用户分组与功率分配联合优化问题。该问题是混合整数非线性规划问题,故难以求其闭式解。
3)为了解决上述问题,提出了两步策略。首先,基于图论中的最大割定理,进行用户分组,保证用户与无人机的相对距离较小。然后,对每组用户分别执行基于多用户和速率最大化的功率分配子问题,通过辅助变量法将其转换为凸优化问题,从而得到每组用户的功率分配因子。
4)仿真结果表明,本文算法在不同的覆盖半径、无人机高度、发射功率和信噪比下具有较好的和速率性能。
2 系统模型及问题描述
考虑一个下行UAV-NOMA系统,如图1所示。该系统包括一个含Nt根发射天线的UAV作为空中基站,工作在固定高度,且地面覆盖范围是半径为R的圆。此外,该系统具有N个单天线地面用户。假设N个用户被分为T组,每组有K个用户,并记第t组的第k个用户为,定义组号集合为t∈{1,2,…,T},用户序号集合为n∈{1,2,…,N},组内用户序号集合为k∈{1,2,…,K}。所有组的用户1均匀分布在半径为R1的小圆内,而所有组的用户i均匀分布在半径为Ri-1和Ri的同心圆环内。其中,Ri-1<Ri,且RK=R,同时定义用户覆盖半径集合为。此外,组内用户利用NOMA技术共享相同的时频域资源,而各组之间保持正交多址接入(OMA,orthogonal multiple access),即忽略组间干扰[21]。
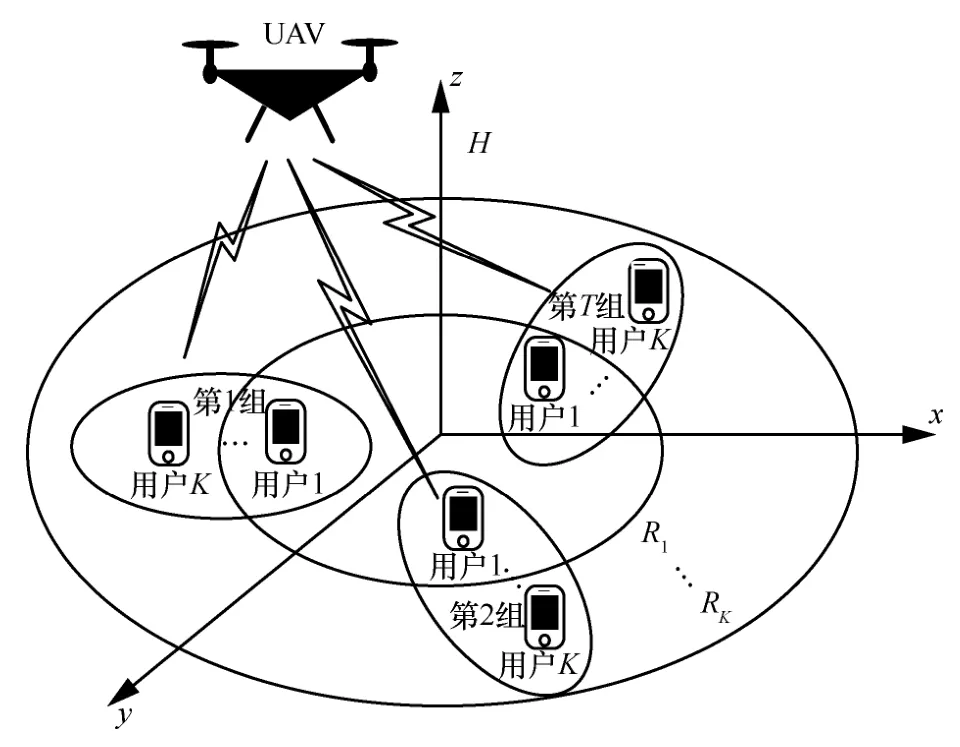
图1 基于无人机的非正交多址接入系统模型
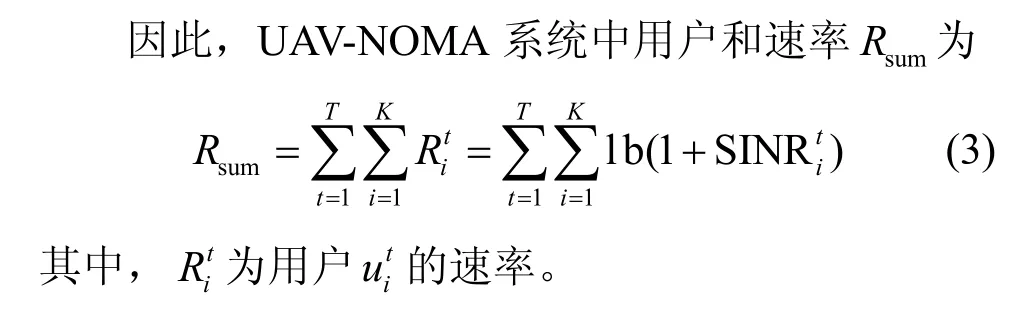
为了提升UAV-NOMA系统频谱效率和传输质量,考虑基于系统和速率最大的用户分组与功率分配联合优化问题,该优化问题可以表示为
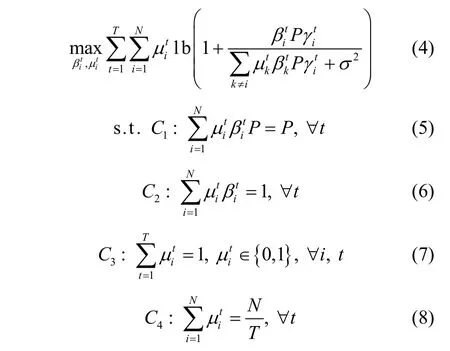
其中,C1表示基站最大功率约束,C2表示用户功率分子因子约束,C3表示一个用户至多分到一个组,C4表示每组用户数约束,=1表示用户i属于第t组,表示用户i不属于第t组[22]。
显然,上述问题是混合整数非线性规划问题,故难以求解。为了使和速率达到最大化,需要穷举搜索才能得到全局最优的用户分组方案,而搜索次数高达次[23]。当用户数很多时,该方式不合理。
为此,提出一种两步策略来减少复杂度。首先,执行用户分组算法。然后,对每组用户执行功率分配算法来得到次优解。
3 基于最大割定理的用户分组算法
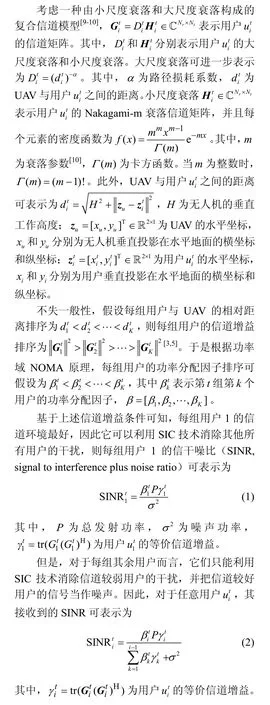
本节将基于图论中的最大割定理提出低复杂度的用户分组算法。传统的用户分组方案通常只考虑用户的信道条件,将信道条件最好的分到一组[24],或将信道差异最大的分到一组[22]。但是,上述方案都只考虑瑞利信道的影响。在复合信道模型下,UAV-NOMA系统会受到Nakagami-m衰落信道的影响。因此,传统的方案也许不适于无人机场景。
此外,资源分配可等价为图论问题。文献[25]将车联网领域中的配对问题转化成图论中的最大割问题,将用户间干扰最小的用户分为一组,从而保证车辆连接的可靠性。文献[26]将用户分组问题转换成图论中的寻找负价环问题来满足最小功率需求。然而,在UAV-NOMA系统中,用户与UAV的距离会影响系统性能。虽然假设用户与UAV的位置固定不变,但是可通过图论中的最大割定理来减少组内用户到UAV的相对距离,从而改善组内用户的信道状况。
假设分组前N个用户具有个初始组,并且每个初始组包含个用户。此外,需要满足式(7)和式(8)中的约束条件C3和C4。UAV-NOMA系统中用户与UAV的相对距离关系可表示为无向图,如图2所示。其中,一个节点表示一个用户,每2个节点间由一条边相连。边的权值为即UAV与用户a和用户b的距离之和。在满足分组约束的条件下,保证组内用户与UAV的总距离最近。这是因为用户距离UAV越近,则信道状况越好。

图2 用户与UAV的相对距离关系
图2中优化用户与UAV的相对距离等价于图论中的最大割问题。已知图G=(V,E),其中,V表示地面所有用户的集合,Vi表示第i个初始组的用户集合;E表示边集合,表示每次可被选择的边集合,表示K的补集,并且当i=1时,否则,
对于无向图,分组后所有用户被分到T个组,因此显然,而分组后每组用户数。此外,根据所有已选边与未选边之和为边集E,可以得到

下面,证明利用K维相对距离来实现最大割的可行性,有命题1成立。
命题1如果需要完成K个用户分组,并且所有用户则可以通过计算ωK,而不是判断来自所有组合边的权值之和来确保K个用户与UAV的相对距离最小。
证明对于任意的组内用户数K与组数T,已知每个用户均来自用户集合V,则有
证毕。
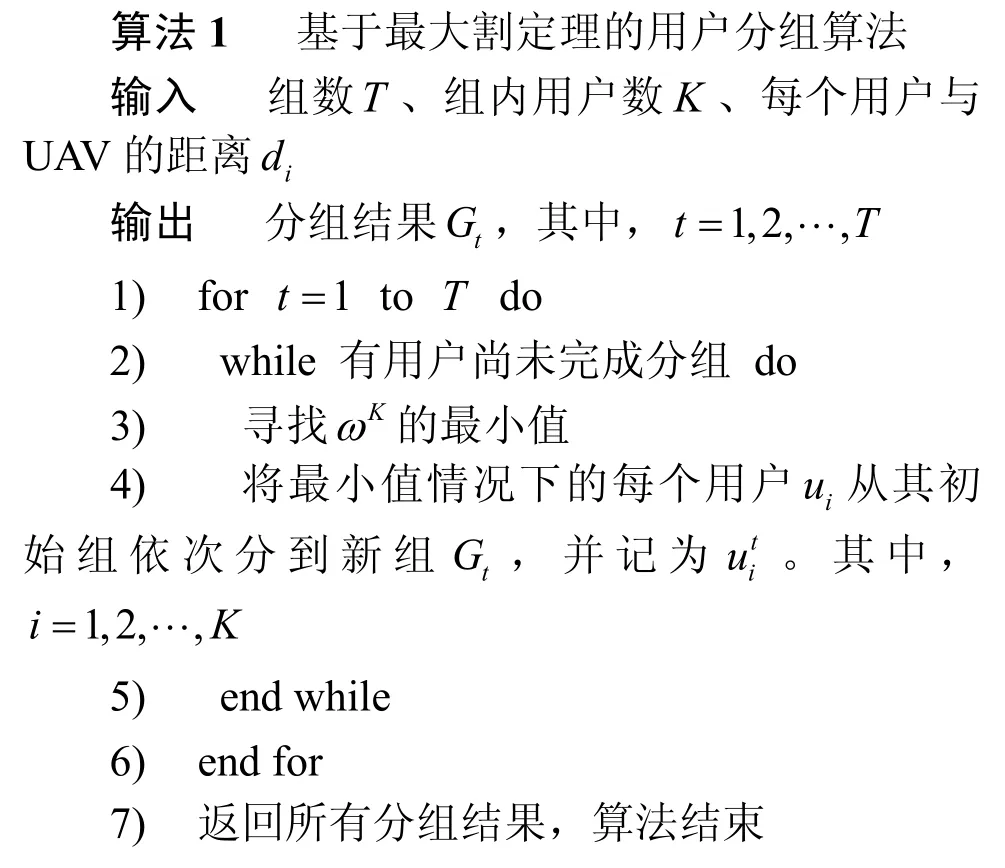
本文所提基于最大割定理的用户分组算法如算法1所示。
4 基于和速率最大化的功率分配算法
本节研究的功率分配算法是基于第2节中定义的信道增益排序假设。不失一般性,定义第3节的分组结果为t*。基于该结果,式(4)问题可以等价为如下功率分配子问题
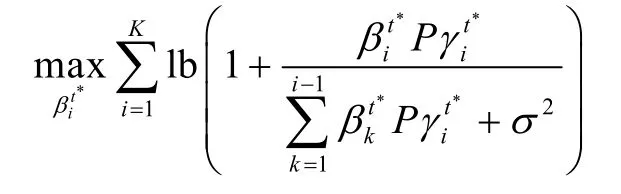
其中,约束条件为每组用户的总功率分配因子约束。
虽然该约束条件是凸条件,但是目标函数分子分母存在耦合项,不易求解。利用辅助变量法[27]定义非负辅助变量,可以将目标函数缩放成

其中,C5与式(11)相同,C6为辅助变量上界。
由于目标函数和约束条件是正项式,因此式(13)是几何规划问题。因此,通过改变变量,分别可转化为。约束条件C2可转换为
其中,约束条件C7为凸条件。至此,可以求得次优功率分配因子[28]。
5 仿真结果
本节将通过仿真验证本文算法的有效性。当Nakagami-m衰落信道参数m>1时,表示LoS链路。不失一般性,假设m=2,路径损耗参数α=3,且每组总发射功率P=1W。此外,假设UAV的发射天线数为4。为了方便地分析问题,定义如下几类算法:本文算法,即联合本文所提的用户分组算法和功率分配算法;算法1,即联合最强近用户与最强远用户(BNBF,best-near best-far)分组算法[24]和固定功率分配算法[21];算法2,即联合最强近用户与最弱远用户(BNWF,best-near worst-far)分组算法[22]和固定功率分配算法[21],其中,地面用户的功率分配因子固定为分别对应两用户、三用户、四用户和五用户的情形;算法3,即联合BNBF用户分组算法[24]与基于最小速率需求的功率分配算法[29]。
图3对比了不同覆盖半径下两用户正交与非正交UAV系统和速率性能。其中,非正交UAV系统应用本文算法。此外,假设R1=0.5km、H=0.5km、SNR=5dB。由图3可知,与OMA方案相比,无人机在NOMA方案下具有更好的和速率性能。显然,随着组数T增大,非正交UAV系统的性能优势更明显。这表明应用本文算法的非正交UAV系统在用户数较多时仍具有较好的频谱效率。
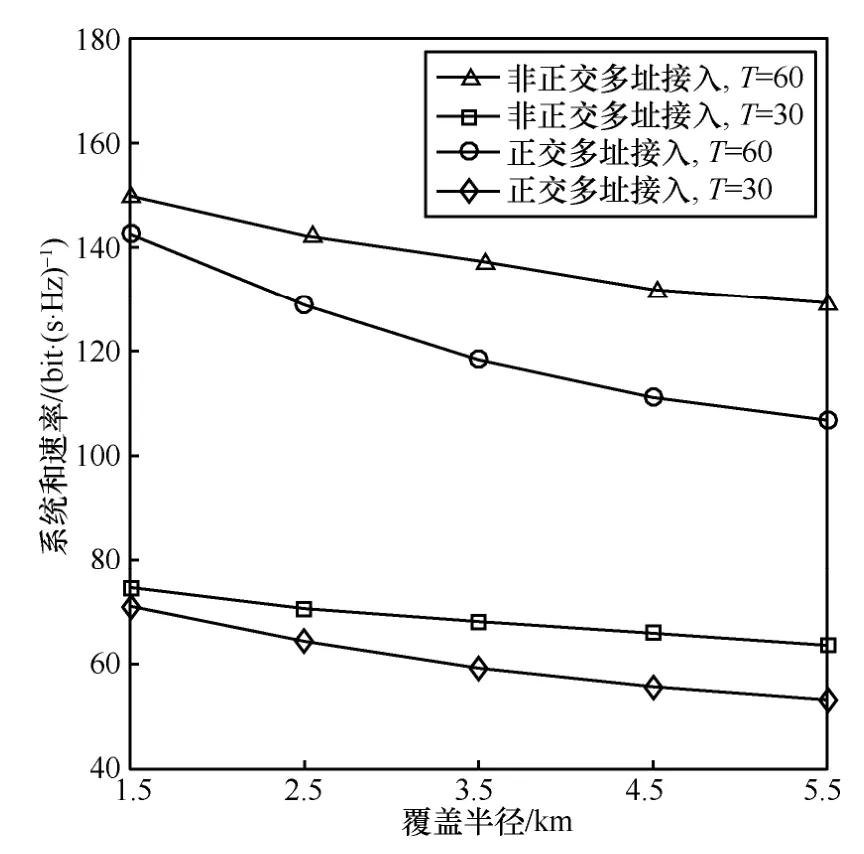
图3 不同覆盖半径下两用户正交与非正交UAV系统和速率性能
图4给出了不同高度下两用户非正交UAV系统和速率性能。其中,R1=0.5 km、R2=1.5 km、T=10、SNR=5 dB。由图4可知,与其他动态算法相比,应用本文算法的UAV-NOMA系统具有更好的和速率性能。这表明本文算法的有效性,从而保证UAV-NOMA系统的工作高度更具灵活性。
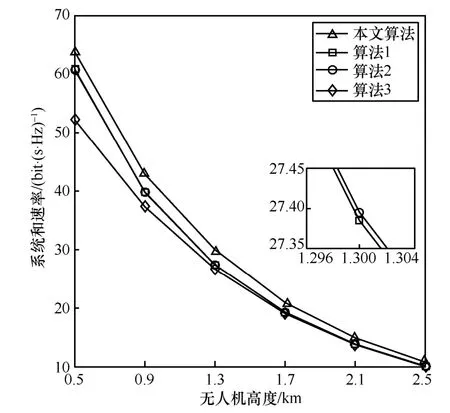
图4 不同高度下两用户非正交UAV系统和速率性能
图5对比了不同功率下两用户非正交UAV系统和速率性能。其中,假设R1=0.5 km、R2=3 km、H=1 km、T=10、SNR=5 dB。显然,随着总发射功率的增加,UAV-NOMA系统和速率也增加。其中,本文算法具有最优的和速率性能。因此,对比动态BNBF、BNWF算法、基于最小速率需求的功率分配算法,本文算法使UAV-NOMA系统的频谱效率得到较好提升。
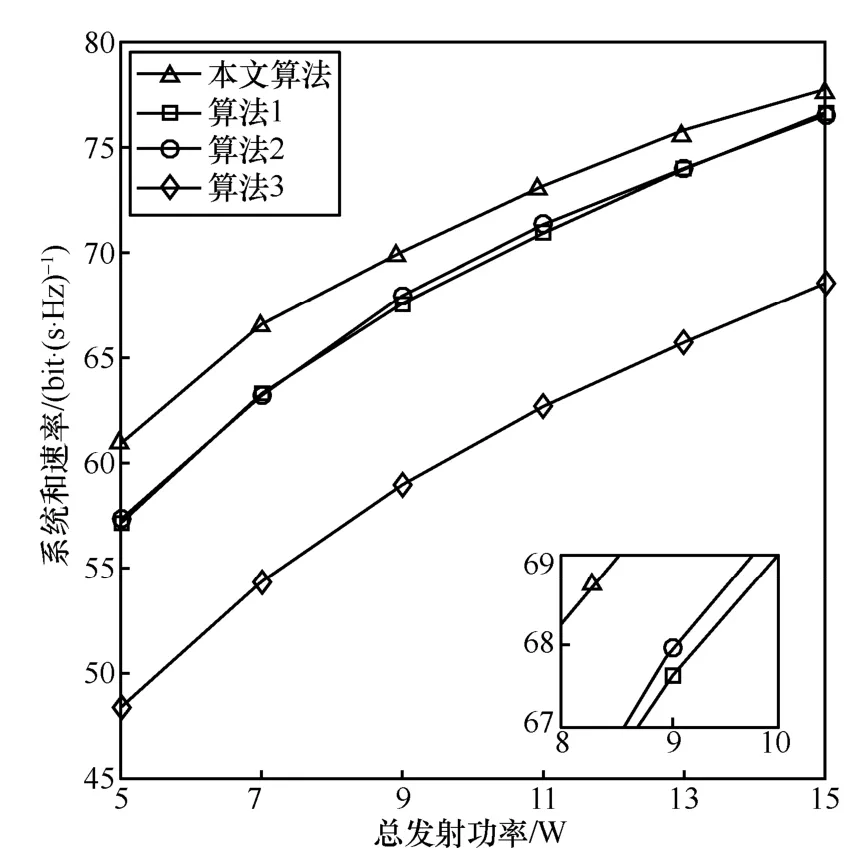
图5 不同功率下两用户非正交UAV系统和速率性能
图6给出了不同信噪比下两用户非正交UAV系统和速率性能。其中,R1=0.5km、R2=3km、H=1km、T=10、SNR=5dB。由图6可知,本文算法具有最优的和速率性能。对比传统的动态用户分组算法[22,24]与功率分配算法[5,29],本文算法与基于和速率最大化的功率分配算法更适于Nakagami-m衰落信道下的两用户UAV-NOMA系统。

图6 不同信噪比下两用户非正交UAV系统和速率性能
图7对比了不同信噪比下三用户非正交UAV系统和速率性能。其中,R1=0.5 km、R2=1 km、R3=3 km、H=1 km、T=10、SNR=5 dB。由图7可知,本文算法在三用户场景下也具有相对最优的和速率性能。
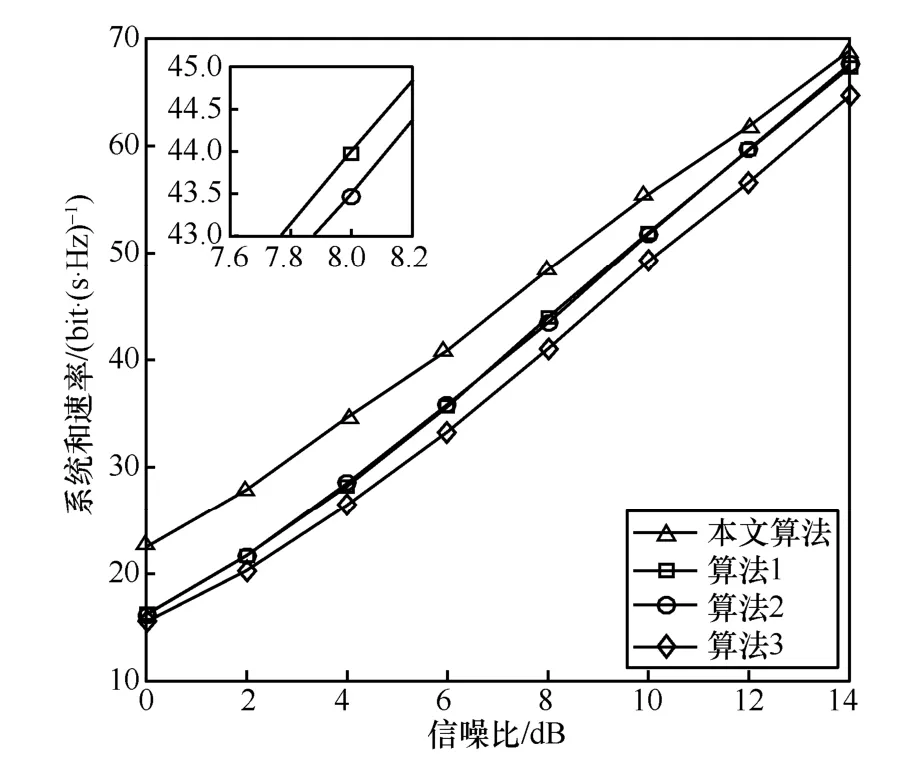
图7 不同信噪比下三用户非正交UAV系统和速率性能
图8给出了不同信噪比下四用户和五用户非正交UAV系统和速率性能比较。其中,=[0.5,1.5,2.5,3]和=[0.5,1,1.5,2,3]分别代表四用户和五用户UAV-NOMA系统中各用户的覆盖半径。此外,H=1 km、T=10、SNR=5 dB。显然,在相同的组内用户数K下,本文算法具有更优的和速率性能。另外,五用户系统和速率性能比四用户系统和速率性能更好,这表明本文算法比其他传统算法更适用于用户数较多的情形。
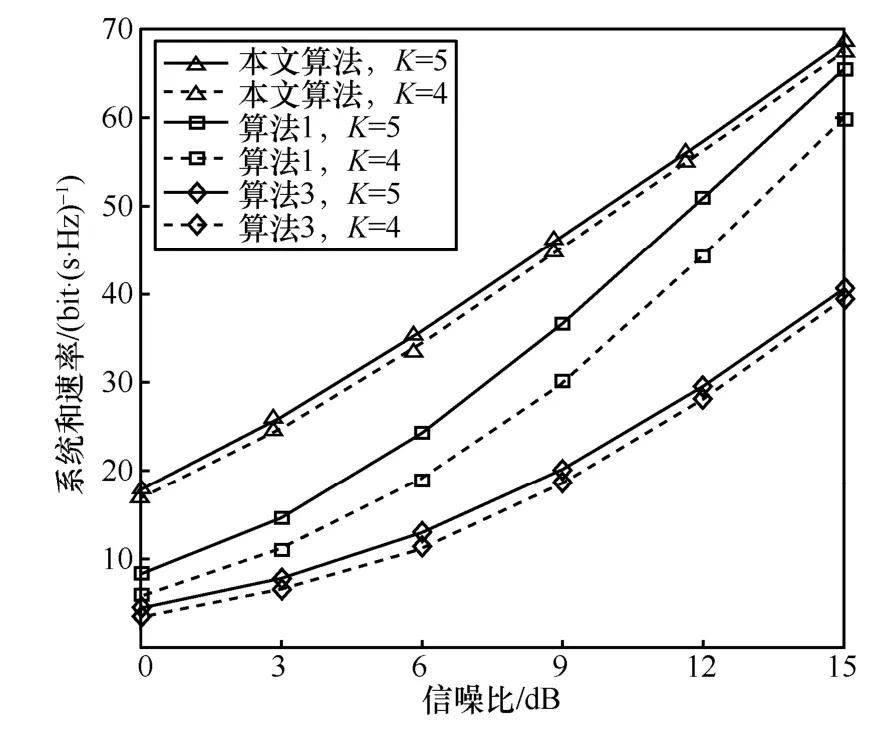
图8 不同信噪比下四用户和五用户非正交UAV系统和速率性能
6 结束语
本文研究了基于无人机辅助的NOMA网络的联合用户分组与功率分配算法,从而进一步提升了无人机系统的频谱利用率。本文算法能够动态地进行用户分组,并且得到每组用户的功率分配因子。仿真结果表明,对比正交UAV系统,应用本文算法的非正交UAV系统在不同覆盖半径条件下具备更好的系统和速率性能。此外,针对不同UAV高度、不同发射功率、不同信噪比等情形,非正交UAV系统在应用本文算法时都具备较好的和速率性能。同时,对比随机用户分组,动态BNBF、BNWF用户分组,以及固定功率分配、最小速率需求功率分配算法,本文所提的基于最大割定理的用户分组算法与基于和速率最大化的功率分配算法具有更好的稳健性,从而有效地提升了Nakagami-m衰落信道下的UAV-NOMA系统的频谱效率。后续工作将重点考虑组间干扰与不完备信道状态信息的影响,同时设计上行多小区多组场景下旋转无人机辅助的NOMA网络启发式功率分配算法。
