焊接机器人在自动化专业实验教学中的应用
2020-10-09黄玉水胡凌燕
乐 健,黄玉水,张 华,胡凌燕
(南昌大学 信息工程学院,江西 南昌 330031)
目前,自动化专业课程教学理论性强,与生产实际联系少,学生不了解相关课程的实际应用,学习的积极性、主动性不高。为了激发学生主动学习的积极性,需要研究面向新工科的交叉研究平台的构建与有效运行[1]。许多教师在这方面进行了探索,如:对综合性大学自动化专业机器人实践教学体系的探索[2],将五轴工业机器人引入机械工程实验教学[3],将机器人声源定位系统融入实验教学[4],对机器人技术实验教学进行改革与实践[5],对Android 手机控制球形机器人实验进行设计[6],对结合机器人技术的嵌入式实践教学进行探索[7],对基于机器人足球平台的工程训练进行研究等[8]。焊接机器人是一种实际应用很普遍的工业机器人,焊接机器人技术涉及机械、电子、传感技术、智能控制算法和程序设计等课程知识。本文将研究自主移动焊接机器人在自动化专业实验教学中的应用。
1 自主移动焊接机器人的机械部分
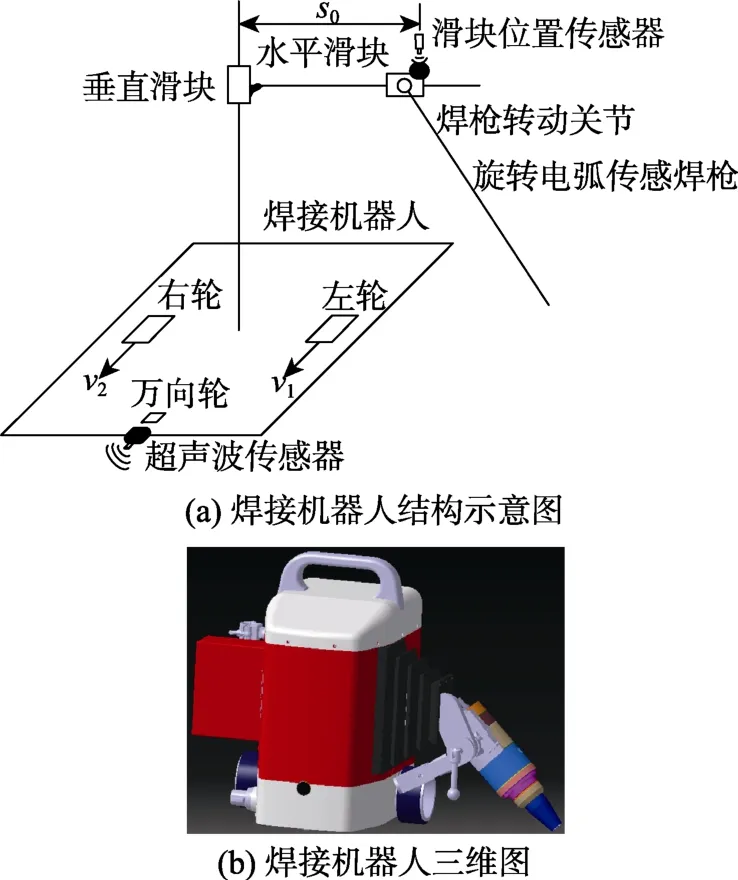
图1 焊接机器人机械部分
图1 为焊接机器人的机械部分,图1(a)为焊接机器人的结构示意图,主要包括轮式移动系统、十字滑块系统、焊枪转动关节、旋转电弧传感焊枪及机器人外壳等。学生需针对焊接任务,利用机械原理、机械设计等相关课程知识,对机器人的机械部分进行设计。还要利用二维机械制图软件 CAD 及三维机械制图软件 CATIA 分别绘制机器人的二维图及三维图,如图1(b)所示。使学生将机械设计制造相关课程的理论知识融入实际工程应用中。
2 自主移动焊接机器人的硬件部分
如图2 所示,焊接机器人系统的硬件部分主要包括焊缝跟踪系统的硬件部分和焊接系统的硬件部分。焊缝跟踪系统的硬件部分主要包括人机交互模块、信号采集模块、电弧转速控制模块和运动控制模块。人机交互模块通过单片机技术实现机器人工作状态显示及机器人工作模式的输入;信号采集模块利用数据采集卡采集多种传感器的输出信号,主要包括焊接电流、滑块位置信号、超声波信号,并将采集到的信号通过PC104 总线输入到工业控制计算机中;电弧转速控制模块对电弧转速进行闭环控制,并实现起弧、熄弧控制;运动控制模块就是利用工业控制计算机对输入信号及采集到的传感信号进行处理,通过运动控制卡及电机驱动器,控制各电机协调运动。焊接系统的硬件部分主要包括焊接参数改变模块及送丝速度调节模块。通过自主移动焊接机器人硬件部分的实验教学,能够使学生了解单片机技术、电机运动控制技术、工业控制技术及电子线路 CAD 等课程的实际应用,从而加深对这些课程理论知识的理解。

图2 焊接机器人硬件部分
3 自主移动焊接机器人的传感技术
自主移动焊接机器人需要利用多种传感器采集反映机器人工作状态的信号,这些传感器包括霍尔电流传感器、电弧转速传感器、旋转电弧传感器、超声波传感器和滑块位置传感器等。
3.1 霍尔电流传感器
图3 为霍尔电流传感器实物图及其工作原理示意图。图3(a)为霍尔电流传感器实物图,需要引出3 根线,分别是地线、+24 V 电源线及信号输出线。图3(b)为其工作原理示意图,其中,d为霍尔器件的厚度,I为偏置电流,B为磁场强度,U为霍尔传感器输出的霍尔电压。焊接缆线通过霍尔电流传感器中的孔,并产生磁场,磁场强度大小与焊接电流大小成正比,将产生的磁场B垂直作用于霍尔传感器中的霍尔器件上,根据霍尔效应,感应出霍尔电压U,其值与通过缆线的焊接电流成正比,从而根据霍尔电压U实现对焊接电流的测量。
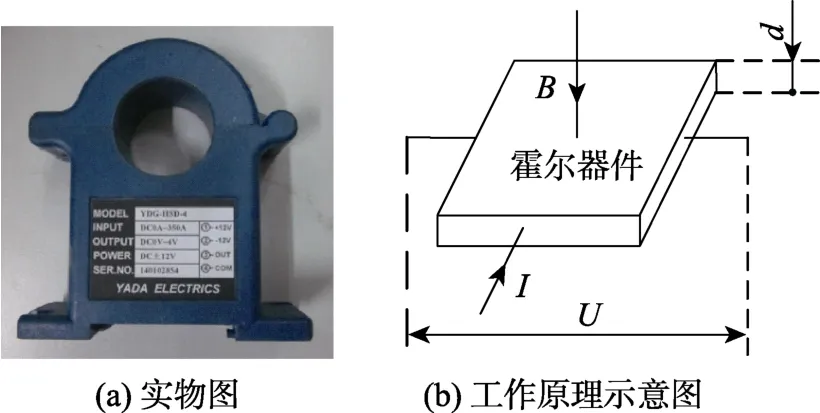
图3 霍尔电流传感器实物图及其工作原理示意图
3.2 电弧转速传感器
图4 为电弧转速传感器实物图及其工作原理示意图。图4(a)为电弧转速传感器实物图,共有3 根引线,分别为地线、+5 V 电源线及输出电压U引出线。图4(b)为电弧转速传感器工作原理示意图,当转子上的凹槽转动至光发射器与光接收器的连线上时,光接收器可以接收到光发射器发射出的光,使光接收器导通,使输出电压U输出低电平;当转子上的凹槽未转动至光发射器与光接收器的连线上时,光接收器没有接收到光发射器发射出的光,光接收器未导通,使输出电压U输出高电平。转子每转动一圈,输出一次低电平,通过测量单位时间内传感器输出低电平的次数,实现对电弧转速的测量,为电弧转速的闭环控制提供反馈信号,实现对电弧转速的闭环控制。

图4 电弧转速传感器实物图及其工作原理示意图
3.3 旋转电弧传感器
图5 为旋转电弧传感器实物图及其工作原理示意图。图5(a)为实物图,共有5 根引线,分别为用于给直流电机供电的+24 V 引线及地线、+5 V 引线、地线及电弧转速信号输出引线。
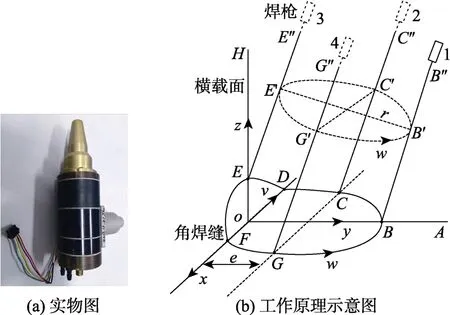
图5 旋转电弧传感器实物图及其工作原理示意图
图 5(b)为旋转电弧传感器工作原理示意图[9-11],电弧从位置B逆时针转动至位置C、位置D及位置E,使干伸长先变长,后变短,对应焊接电流先变小,后变大。同理,当电弧从位置E转动至位置F,再至位置G、位置B时,干伸长先变长,后变短,使焊接电流先变小,后变大。通过分析曲线GBC对应的焊接电流之和与曲线CDEFG对应的焊接电流之和的关系,即可基于旋转电弧传感器实现对焊枪相对于角焊缝焊接偏差的识别。
3.4 超声波传感器
图6 为超声波传感器的实物图及其工作原理示意图。图6(a)为超声波传感器实物图,共含有3 根引线,分别为+12 V 的电源线、地线及信号输出线。图6(b)为超声波传感器工作原理示意图,超声波传感器输出电压的大小与传感器前端离前方障碍物的距离成线性关系,通过建立输出电压与距离的数学模型[12],可实现对超声波传感器与前方障碍物距离的测量。
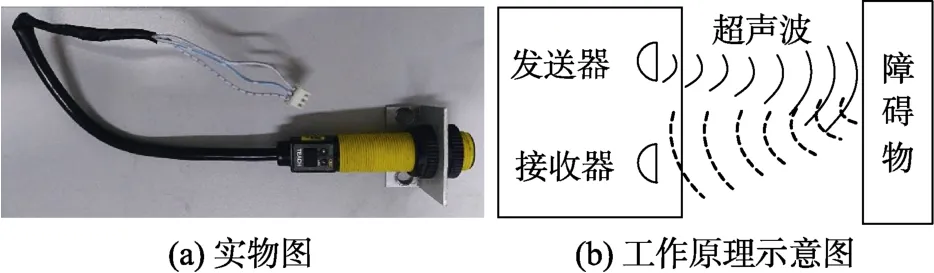
图6 超声波传感器实物图及其工作原理示意图
3.5 滑块位置传感器
图7 为滑块位置传感器实物图及其工作原理示意图。图7(a)为滑块位置传感器实物图,其有3 根引出线,分别为+5 V 的电源线、地线及信号输出线。图7(b)为滑块位置传感器工作原理示意图,滑块位置传感器固定于机器人本体上,金属反射片固定于水平滑块或垂直滑块上,并随着滑块运动而运动,当其运动至滑块位置传感器的正前方时,滑块位置传感器输出信号端输出高电平,否则输出低电平,从而实现对滑块位置的检测。

图7 滑块位置传感器实物图及其工作原理示意图
通过焊接机器人传感系统的实验教学,能够使学生了解多种类型传感器的用途、工作原理及使用方法。
4 程序设计
工具栏和菜单栏是对应的,其中,工具栏包括焊缝跟踪、手动控制、参数设置、历史记录和系统测试等。可以通过左键单击工具栏对应的图标,实现对不同模块的测试。如左键单击焊缝跟踪图标后(见图8),可选择焊缝类型和焊丝类型,然后单击开始按钮;当需要停止焊接时,单击停止按钮。单击打开按钮后,弹出的窗口用于设置间断焊的参数。
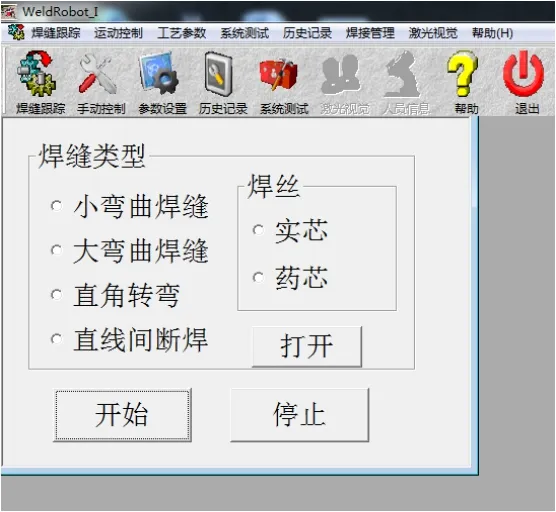
图8 焊缝跟踪焊接操作界面
图9 为机器人跟踪焊接直角焊缝程序流程图。当机器人开始焊接时,基于多传感器采集的信号,并通过滤波,识别出焊枪空间姿态的数学模型;利用偏差识别算法,识别出焊接偏差;采用智能控制技术,控制机器人各关节协调运动;基于轮子、水平滑块和垂直滑块的协调运动跟踪焊接直角焊缝。使学生能够利用MFC(microsoft foundation classes,微软基础类库)编写人机交互界面,使用C 语言和C++语言实现焊缝跟踪控制算法。

图9 机器人跟踪焊接直角焊缝程序流程图
5 结语
本文研制的自主移动焊接机器人,为自动化专业实验教学提供了新的设备,使学生能够利用其进行与机械、电子、单片机、传感技术和程序设计等自动化专业课程相关的综合性实验设计。
利用自主移动焊接机器人系统的机械部分、硬件部分、传感技术及程序设计等,进行了弯曲直角焊缝的跟踪焊接。使学生不但掌握了机器人相关的理论知识,并通过实际应用发现问题、改进理论,达到产学研相结合的目的,提高了学生的综合素质。
通过将生产、学习和研究过程相结合,使学习来源于生产,并最终服务于生产,有利于实现“卓越工程师教育培养计划”,提高学生的理论知识水平及工程实践能力。