油气运输管道智能清洗管理研究
2020-10-09何娜娜
何娜娜
长安大学 公共管理与法学院 (陕西 西安 710054)
由于运输管道具有相对运量大、节约土地资源、占地少、污染少而广泛用于石油天然气运输领域。有关资料[1]表明,与公路、铁路、航空等其他运输方式相比,我国运输管道所占的比例较低。与发达国家相比,我国油气运输管道的运量仅不到10%,运输总里程占比较少,直接导致我国油气运输的运力不足,造成我国有些地区油气资源供应紧张。
近年来,随着我国石油天然气开采业的发展,我国油气管道运输总里程不断增长。截至2018 年末,已经达到了122 300 km,其中石油输送管道约为46 300 km,天然气输送管道长度约为76 000 km,同比增长2.51%。从天然气产量和消费量增速对比来看,产量与消费量增速普遍高于管道里程增速,一定程度上制约了天然气行业的发展。而石油运输管道近年来的发展速度也比较缓慢,至2019年两会时,国家发改委提出“组建国家管网公司,整合三大石油公司油气管道业务,引入社会资本,促进业务整合,发挥创新能力,激发企业活力”。预计未来几年我国油气管道行业将迎来加速建设时代,将有效解决油气管道建设发展整体滞后的问题,以保障油气资源和能源储备,提高油气能源供应安全,推进能源消费结构的转变。
1 油气运输管道管理存在的问题
1)运输管道老化,存在安全隐患。石油和天然气分别表现为液态和气态,是以碳氢化合物为主要成分的易挥发、易泄露、易爆的可燃性资源。采用管道运输,既减少挥发损耗,又降低对空气、水和土壤的污染。油气管道基本上全部埋藏于地下,输送过程受输送油品和气品材料的变化,受土壤地质的变化及水资源成分的影响,致使管材容易发生腐蚀和化学变化,降低原来的设计使用寿命。据了解,我国油气管道一半以上的使用寿命已经超过20年,甚至一些地区的管道使用已超过30年,由于管道埋于地下,出现老化和损坏很难及时察觉。加之,地面不正当施工等人为因素,或者地震等自然灾害也对油气管道的使用寿命以及安全造成严重影响。
2)运输管道清洗管理技术相对落后。运输管道在我国正处于上升发展时期,建设综合覆盖的运输管道网络需要完善健全的运输管理体系。但是与公路和铁路建设相比,我国目前还未形成相对完整的运输管道管理模式,例如缺乏对地下管道地理信息技术的数据采集、整理、分析反馈等。与发达国家相比计量测量仪器的精度仍然较低,管道的设计、施工和检修等等都是未来我国运输管道管理建设过程中需要完善和解决的问题。其中,运输管道的清洗管理技术仍是一个难点,附着在管道壁上的污垢含有大量的有机物及泥砂等固态或软泥态杂质,长期附着在管道上易造成流体阻力的增加,也造成了整体运行动力费用的上升,甚至影响运输管道的运行安全。
3)运输管道规划建设仍有待提高。国内外交通运输实践表明,运输管道建设周期短、费用低。在相同运量的条件下,运输管道的建设周期仅是铁路的2/3,特别是地质、地貌和气候条件相对较差的地区,相关统计资料表明,管道建设费用比铁路低60%左右。
目前我国油气管道网络布局区域性较为明显,原油管道网络主要分布在西北部及长庆油田周围,东部地区网络较疏,地区网络之间相互独立,没有形成连接。原油和天然气管道网络由于运输管道网络的相互孤立,无法满足市场,需要加快油气运输管道网络建设,确保我国油气能源安全储备。与美国等发达国家相比,我国政府对于油气运输管道的监管还有待提高。
2 油气运输管道清洗技术发展现状
油气运输管道大多属于隐蔽工程,油气管道由于长期不间断的工作,管道内部会积累很多杂质,管道中往往会产生聚合物、结焦、油垢、水垢、沉结物、铁锈腐蚀物等污垢,使设备和管道严重失效、生产效率下降、能耗增加,严重时会使运输流程中断,甚至会导致堵塞而被迫停产,造成重大经济损失。因此需要对油气管道进行定期的清洗。
在石油开采过程中,含有石蜡、泥沙及其他杂质的原油,会经常使输油管道堵塞,需换取出来进行清洗[2]。由于人工清洗油气管道时人身体无法直接进入,采用化学清洗方法又对运输管道造成严重腐蚀,而且对周围的生态环境造成严重污染,因此油气管道的清洗问题一直困扰我国的大部分管道用户企业,尤其是油气运输管道企业。
目前在国内石油化工行业,大多仍采用人工清洗流程,其存在管道空间狭窄、工作环境恶劣、劳动量大、劳动强度较高等缺陷;多数管道液体含有不利于人体健康的物质,对操作人员身体造成巨大危害。
目前,针对长线油气运输管道,在长时间的运输过程中会产生大量的污垢和沉降物,原油中的主要固态物质为烃,还包括钡、锶、镁、钙的硫酸盐或碳酸盐[2]。采用物理方法对液体介质进行电场或磁场处理,使其暂时失去结垢能力。
随着科技的发展,使用机器人进行油气运输管道的清洗已有一定的研究,尤其是采用高压水射流清洗技术,使管道的清洗更高效、更节能、更环保。20 世纪末,日本研制出一款用于50 mm和150 mm的管道轮式机器人(图1),一直处于试验阶段,最后却没有投入到实际应用。

图1 日本东京大学的管道机器人
德国学者2000 年研制了多关节蠕虫式机器人MAKRO(质量 50 kg),适用于直径 300 ~600 mm 的管道(图2)。加拿大INUKTUN 公司研制了双履带式管道机器人(图3),尽管其适应于不同管径,但机器人必须在进入管道前根据运输管径调整好,一旦投入工作,无法调整管径大小,工作稳定性不好,容易发生倾倒[3]。
1997 年日本东芝公司开发了一台微型轮式管道机器人,采用多轮式驱动,通过前端安装的微型CCD 摄像头检测管内异物,进而操控机械手进行清理,适用于25 mm管径。
我国清华大学、浙江大学、上海交通大学、哈尔滨工业大学、中国科学院、大庆石油管理局等20 余家科研院所相继进行了管道机器人的研究,但一直没有取得应用性突破。

图2 德国MAKRO的管道机器人

图3 加拿大双履带管道机器人
3 油气运输管道清洗方法
3.1 油气运输管道的清洗技术
油气运输管道清洗常见的有化学清洗技术和喷砂清洗技术。随着科学技术的不断发展,出现了清管器清洗技术和高压水射流技术等。对于几十公里乃至数百公里的油气运输管道,一般选择清管器清洗技术和高压水射流技术;在某些特殊工况下会选择化学清洗技术。
3.1.1 清管器清洗技术
近年来,清管器清洗技术已被广泛应用于油气运输管道的清洗、保养和维护。所谓清管器清洗技术,就是在一定的外力作用下,依靠清管设备部件刮擦运输管壁,将附着在管壁的污垢物刮带出管道外。这个外力既可以是运输管道内油气的自身压力,也可以是额外提供的水压或气压。
清管器清洗技术的优点是:适应运输管径范围大,运输距离长,无需使用化学清洗剂,对运输管道无腐蚀,对土地、大气和水无环境污染;可实现不停产在线清洗,操作简便,清洗费用低。缺点是:不能适时检测运输管道的内部服役状况并作出使用状况评价,无法为油气运输管道的运行安全提出预警和评判。
3.1.2 高压水射流清洗技术
高压水射流清洗技术由清洗车系统、喷射系统、管道系统和存污系统4 部分组成。受地形条件限制,根据GB 50253—2006《输油管道工程设计规范》,两个联络井的一般间隔距离为数十米,最长可达300 m。清洗时需要在联络井中放置排污泵,使清洗时的污水利用运输管道的设计纵坡流向泵入口,通过排污泵把污水带出管道外,由存污装置进行排污处理。高压水射流清洗技术的一般工作压力为2~35 MPa;对于结垢清洗的工作压力为70~270 MPa,作业时会产生较大的冲击力,应封闭工作区,配备相应的安全操作人员和安全防护器具,一人操作清洗设备,一人观察设备运转,如有紧急情况,可立即停泵卸压。
高压水射流清洗技术的优点是:采用普通自来水作为介质,使用成本低;清洗完毕的油气管道显露金属本色,质量高;清洗完成后不用再进行洁净处理;清洗效率是化学清洗和喷砂喷丸清洗无法比拟的。缺点是:人员操作有一定的安全风险,需要制定操作安全防护预案和管理防护措施。
3.2 油气罐体清洗技术
对于一些地形偏僻地区,一般远离主要油气管道路线,如果铺设管网,建设成本太大,因此运营企业一般采用油气罐体进行储存。对地下或地上油气罐体的清洗是非常困难和危险的。如图4 所示,地下油气罐体清洗先采用清空储存油气罐体进行气体通风置换,罐体内气体符合操作条件时,清洗操作人员才佩戴专业的防爆设备和工具进入罐体,铲除污油和污泥排出罐体,再用高压水枪冲洗。该方法不仅存在重大清洗安全隐患,而且清洗质量也不够彻底,所需的停工时间长,易对新进油品和气品造成二次污染。

图4 地下油气罐体的清洗
4 油气运输管道智能清洗
4.1 自行式清洗机器人系统
自行式清洗机器人系统由变直径圆型管道移动机器人系统、复杂环境下的视觉识别技术、模块化履带驱动单元技术、高压水射流清污技术和远程操控系统等关键技术组成。整个系统满足高温、高防护等级技术[4-5],系统结构包含履带、径向收方、视觉照明、引导系统、录像及传感组件,还有保障车一台,含有电源和清洗剂配比箱、排污储存箱。
自行式清洗机器人系统由一体式收放导向的机构和3 组履带模块组成,其组合导向传动机构[6-8]如图5所示。3组机构沿圆柱方向均布,使机器人以任意姿态进入管道,机器人在管道内实现自动定位,一体式收放导向的构造使得机器人可对不同直径的管道具备柔性适应能力,确保履带与管壁充分接触,集成的履带模块内置动力驱动装置,履带转动,实现履带机器人在管道内的自行移动。

图5 自行式清洗机器人
自行式清洗机器人系统采用全伺服电机驱动,整机管道移动时距离设备1 m 处,运行噪音低于60 dB,无异常振动;系统的主体材质选用轻质铝合金,相互产生位移的接触部位采用铜合金或铝合金制作,减少设备之间冲击与静电集聚;机器人收缩后整体机构尺寸可控制在Φ300 mm的圆以内。
4.2 高压水射流油气管道清洗系统
高压水射流清洗是利用高压柱塞泵和特殊设计的喷嘴产生高压、高速水射流,利用强大的冲击力和水楔作用直接剥离、冲刷油管内、外壁黏结物,去除管道中的污垢和堵塞物,达到清洗油气管体的目的。高压水射流油气管道清洗如图6所示。它具有高效节能、高清洗度、不需要压力容器、冷清洗安全性好、不使用化学药剂、既无污染又节约水资源、自动化程度高、运行成本低等优点。减少了化学作用及时间的消耗,节省运营成本。
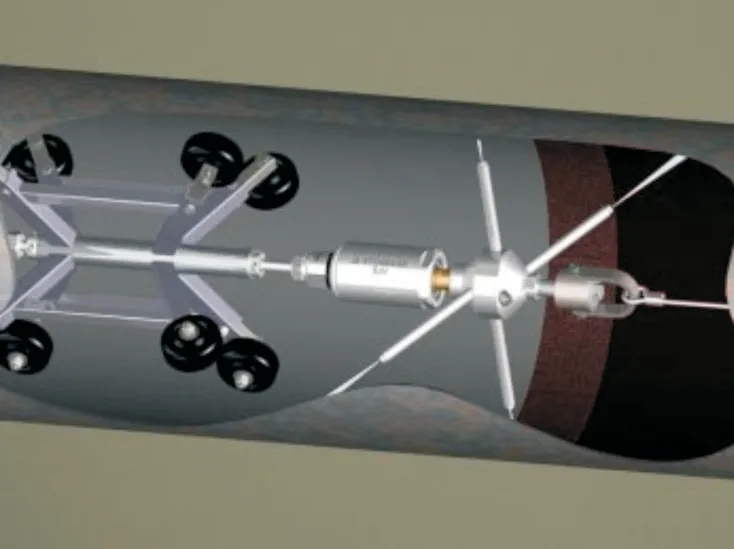
图6 高压水射流管道清洗
5 油气运输管道智能清洗管理
1)清洗前,清洗人员从清洗起点工作口放置自行式清洗机器人,或者从联络井用卷扬机放入管道中,采用视觉系统对管道内及区域连接水平管道等部位进行管道现状检测录像、拍照,用来制作完工报告。
2)管道外水箱按事先设计比例的溶油剂或化油剂,用以提高使用效率。
3)使用专用的集油盒或拖带机器人将清除掉的油垢收集后运出管道。
4)磁铁履带吸住管壁,防止清洗过程中出现打滑现象,能够在有油污的管道内平稳前进。
5)使用高清微型监控摄像头,其成像更加清晰,全视屏操作,360°任意旋转行走,保证管道清洗无死角。使用检测机器人或照相机对清洗后的管道内部情况进行二次拍照、录像,以此评估清洗效果。
6)对于垂直油气管道,自行式清洗机器人配置有高清微型监控摄像头,能适时监测到管道里的实际情况及障碍物,利用差速器的工作原理,启动转弯和竖向爬行功能,继续沿着竖直管道进行清洗。
7)清洗评估符合规定后,进行下一个分段。当天清洗任务应在两联络井间完成,不能将自行式清洗机器人留在管道内。
6 结束语
石油天然气的运输管道清洗具有很大难度,由于其一般输运距离长、管道封闭、跨越地势起伏变化大(可能是高山和大河)等,自行式移动智能清洗将是一种必然发展趋势。通过管道智能清洗技术将运输管道的质量在线检测和清洗效果评估相结合,不仅提供了一种自动清洗方法,减少了人工操作风险和劳动强度,也提供了一种运输管道质量的动态评价方法。在实际应用过程中,必须结合工程实际情况,合理制定清洗方案,才能达到理想的效果。