选煤厂水泵闸板阀开度线激光辅助视觉监控
2020-09-27田军李明姜瑾朱美强雷萌
田军, 李明, 姜瑾, 朱美强, 雷萌
(中国矿业大学 信息与控制工程学院, 江苏 徐州 221116)
0 引言
随着选煤技术的发展与选煤工艺的改进,选煤厂逐渐实现了对选煤设备的集中控制,提高了自动化水平。在选煤生产流程中,水泵阀门是一种重要的操作装置,主要有球形阀和闸板阀。球形阀是一种易于控制开度的装置,已纳入选煤厂集中控制系统。闸板阀由闸板、闸板连接杆和闸板驱动电动机组成,主要由现场人员手动操作闸阀控制器来调整闸板阀开度,再通过视频监控系统粗略确认闸板状态,所以未能纳入选煤厂集中控制系统。
随着人工智能的发展,机器视觉技术广泛应用于煤炭体积测量[1]、胶带测速[2]、矿石细粒在线估计[3]等。采用机器视觉技术对闸板阀运行过程进行自动识别,进而将闸板阀纳入选煤厂集中控制系统是一种可行的方法。然而选煤厂生产环境相对较差,环境光线随时间和天气的变化而变化,通过监控设备采集的视频图像亮度变化跨度大、对比度低、灰度化严重,采用传统机器视觉方法对视频图像进行检测时存在鲁棒性差的缺点[4-6]。线激光具有单色性好、方向性强、亮度高、价格低等特点[7-9],因此本文提出了一种选煤厂水泵闸板阀开度线激光辅助视觉监控方法。通过添加线激光来突显视频监控系统所采集图像中目标的特征信息,经过图像处理获得闸板阀开度,并通过PLC集中控制系统实现闸板阀开度的闭环控制。
1 选煤厂水泵闸板阀开度线激光辅助视觉监控原理
选煤厂水泵闸板阀开度线激光辅助视觉检测装置如图1所示。线激光发射器采用便携式一字线定位激光器,输出特定波长与颜色的激光,管芯功率≤30 mW,工作电压为DC5 V。线激光发射器通过万向架固定于闸板上方约50 cm处供水管道上,通过调整万向架,将线激光投射到闸板上表面。

图1 选煤厂水泵闸板阀开度线激光辅助视觉检测装置Fig.1 Line laser assisted visual detection device for opening of water plug-in gate valve in coal preparation plant
选煤厂水泵闸板阀开度线激光辅助视觉监控原理如图2所示。监控摄像头采集的水泵闸板阀视频图像经视频服务器传输至水泵闸板阀监控系统上位机,上位机对图像进行处理后获得线激光的位置及长度,从而实现闸板阀开度检测;PLC集中控制系统上位机接收水泵闸板阀监控系统上位机发送的闸板阀开度检测值,并与闸板阀开度设定值进行比较,根据比较结果向PLC操作系统发送控制指令,由PLC操作系统发送操作信号给闸板驱动电动机,从而控制闸板阀开度。
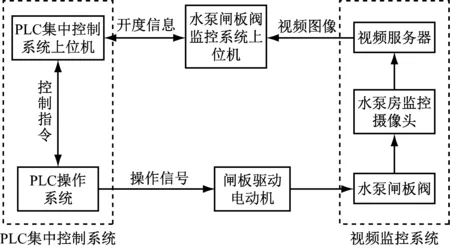
图2 选煤厂水泵闸板阀开度线激光辅助视觉监控原理Fig.2 Principle of line laser assisted visual monitoring for opening of water plug-in gate valve in coal preparation plant
2 选煤厂水泵闸板阀定位与开度检测
选煤厂水泵闸板阀所在环境复杂,采集的图像背景干扰很多,因此需要先采用模板匹配法在原始图像上寻找闸板阀大致活动区域,对闸板阀进行定位;再采用自适应阈值法检测出投射到闸板上的线激光,根据得到的线激光位置及长度对闸板阀开度进行检测。
2.1 闸板阀定位
模板匹配法是经典图像处理中最常用的目标检测方法[10-12],其原理是通过像素对比找出原始图像中与模板图像最相似的区域。具体步骤:将模板图像在原始图像中从左向右、从上到下逐像素点滑动,每滑动1次,从原始图像中截取与模板图像相同大小的子图像,并将子图像与模板图像进行像素比较运算,得到对应的相关系数;待模板图像遍历整个原始图像后,相关系数最大的子图像即为最佳匹配区域[13]。
设原始图像S大小为W×H,模板图像T大小为w×h,模板图像在原始图像上对应的子图像为Sij,子图像左上角像素点坐标为(i,j)。模板匹配原理如图3所示。
模板图像T与子图像Sij的相似程度用匹配度来表示:
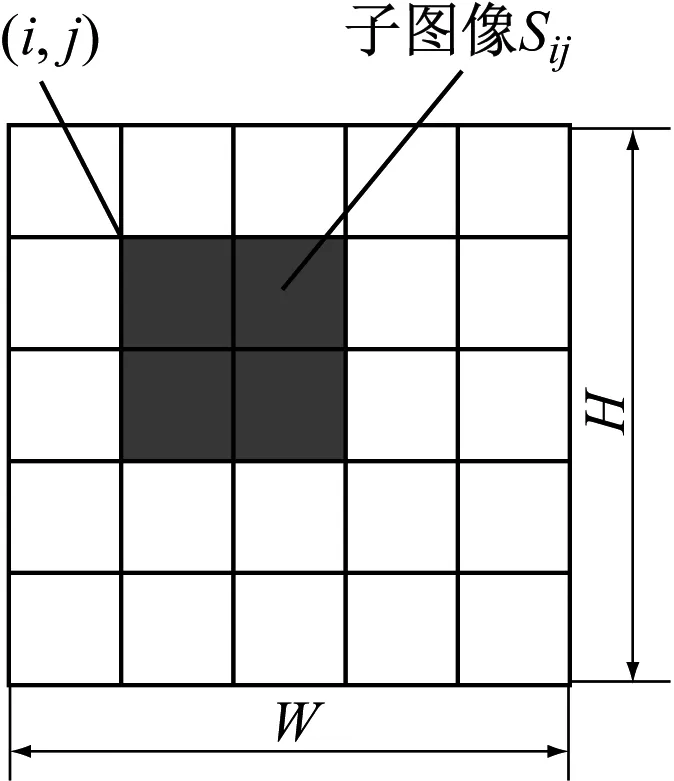
(a) 原始图像S
(1)
式中:M,N分别为模板图像水平、垂直方向像素点个数;Sij(m,n),T(m,n)分别为子图像Sij、模板图像T中坐标为(m,n)的像素点像素值。
对匹配度D(i,j)进行归一化,得到相关系数:
R(i,j)=
(2)
相关系数R(i,j)越大,表示模板图像T和子图像Sij的相似程度越高,当模板图像T与子图像Sij完全相同时,R(i,j)=1。
本文选取背景亮度正常、闸板阀半开状态下的图像,并截取闸板和闸板连接杆可视轮廓最大区域作为模板图像,将监控摄像头采集的视频图像按帧截取作为原始图像输入,利用模板匹配法找到闸板阀在原始图像中的大致区域并截图提取,实现闸板阀定位。
2.2 闸板阀开度检测
阈值法是经典的图像分割算法,其原理是通过设置阈值,将图像像素点分为若干类,从而实现目标与背景的分离[14]。
设给定图像为f,K为阈值,则分割图像g满足:

(3)
式中g(x,y),f(x,y)分别为分割图像g、给定图像f中坐标为(x,y)的像素点像素值。
在实际图像处理过程中,图像背景的像素值受环境影响而变化,单一阈值分割效果会受到影响,因此需要将阈值取成随图像区域位置变化而变化的函数值,即自适应阈值[15]。自适应阈值主要通过计算中心像素点周围一定区域内所有像素点的加权平均值得到,比较常用的方法是根据高斯函数按照像素点与中心像素点的距离进行加权计算。
将定位提取的图像作为输入,先利用自适应阈值法检测图像中的线激光;再通过腐蚀、膨胀等形态学操作,使闸板上的线激光相邻断开区域连接,同时采用高斯滤波方法去除图像噪声,得到完整的线激光;最后根据得到的线激光位置及长度,实现闸板阀开度检测。
3 实验结果与分析
实验图像处理主要在处理器为Intel(R) Core(TM) i7-8750H CPU @2.20 GHz、内存为16 GB的计算机上进行,运行环境为64位Win10操作系统,编程环境为配置OpenCV-3.4.8的JetBrains PyCharm 2019.3开发平台,代码采用Python语言编写。
图像背景较暗条件下水泵闸板阀定位结果如图4所示。可看出没有添加线激光时,图像中闸板阀与背景差别较小,难以准确定位闸板阀;添加线激光后,增加了图像中目标的特征信息,有利于准确定位闸板阀。
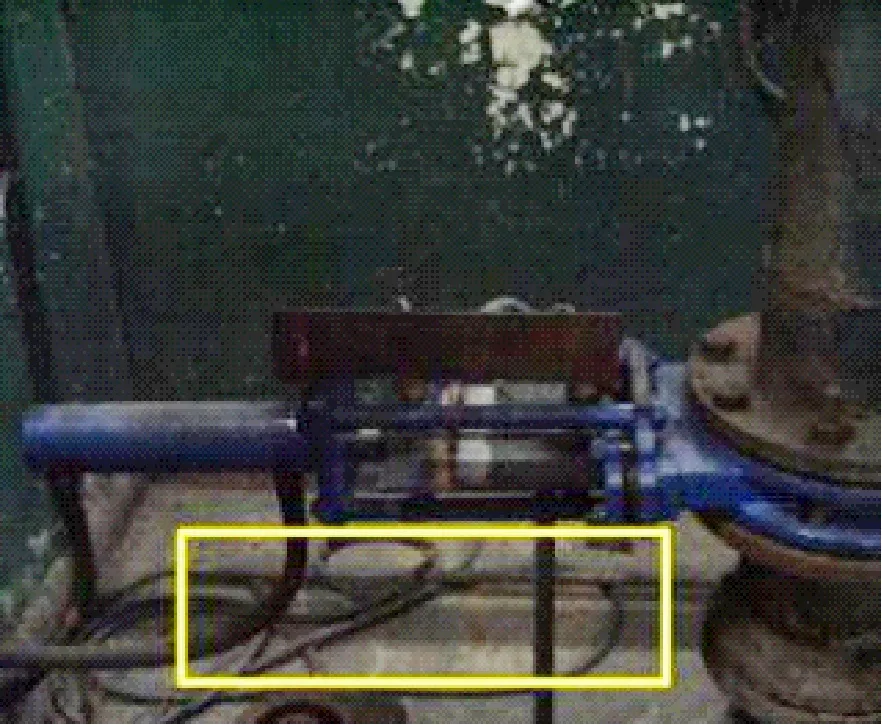
(a) 无线激光
水泵闸板阀开度线激光辅助检测结果如图5所示(左侧图像为原始图像,右侧图像为检测图像),可看出在不同图像背景亮度条件下,投射到闸板上的线激光均可较好地指示闸板阀开度状态。
不同条件下水泵闸板阀开度检测结果对比见表1。可看出没有添加线激光时,仅可检测出背景亮度正常时闸板阀开度且检测效果一般,而几乎无法检测出背景亮度较亮或较暗时闸板阀开度;添加线激光后,可准确检测出不同背景亮度下的闸板阀开度。这是由于在没有添加线激光时,当闸板阀处于全开或半开状态,闸板表面反光部分不均匀,图像噪声较多,噪点对闸板边缘干扰严重,影响闸板阀开度检测效果;添加线激光后,线激光会抑制图像中噪点对关键信息的影响,且线激光的长度和位置信息可更直观、准确地反映闸板位置,进而通过检测线激光即可获得闸板阀开度状态。
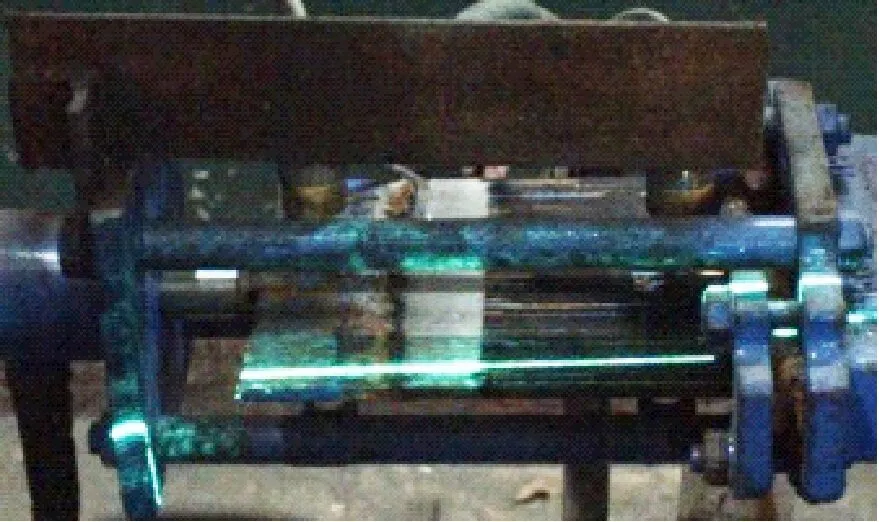
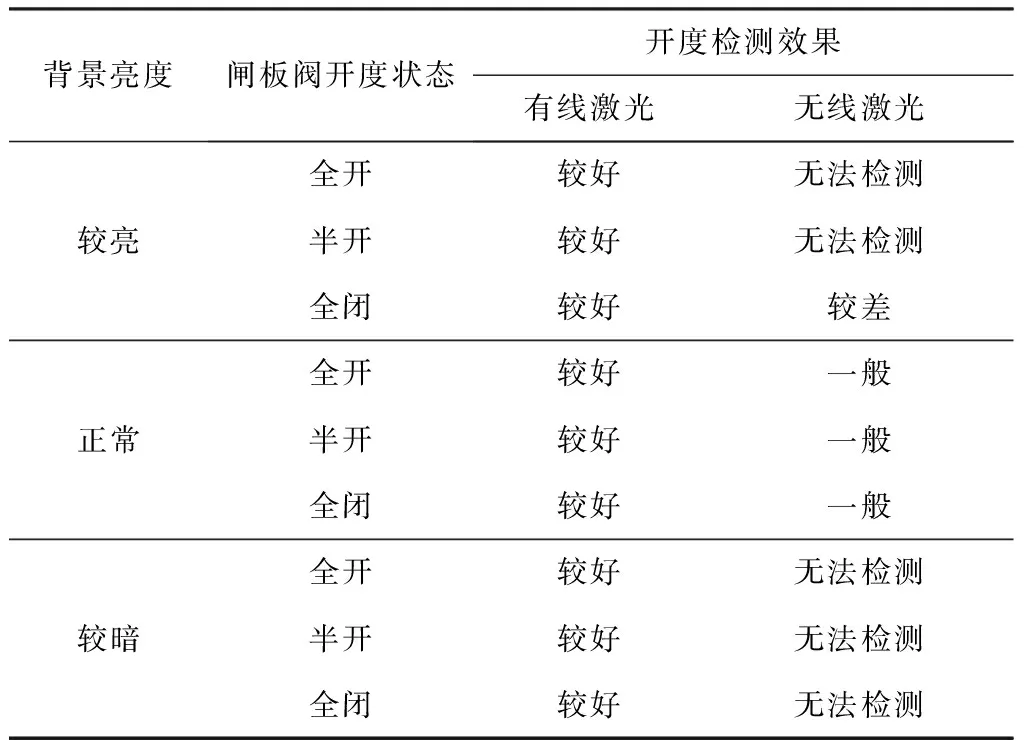
表1 不同条件下水泵闸板阀开度检测结果对比Table 1 Comparison of test results of opening of water plug-in gate valve under different conditions
4 结语
提出了一种选煤厂水泵闸板阀开度线激光辅助视觉监控方法。通过添加线激光来增加目标检测特征,并利用视频监控系统采集闸板阀图像;采用模板匹配法对图像中目标进行定位,再利用自适应阈值法检测图像中线激光位置及长度,从而获得闸板阀开度;PLC集中控制系统通过对比闸板阀开度检测值与设定值,实现闸板阀开度的闭环控制。实验结果表明,该方法在不同背景亮度条件下,均可准确定位闸板阀,提高了闸板阀开度检测准确性。
