基于差分误差抑制优化方法的井下目标定位
2020-09-27宋运忠王仁辉
宋运忠, 王仁辉,2
(1.河南理工大学 电气工程与自动化学院, 河南 焦作 454000;2.国网安徽省电力有限公司 颍上县供电公司, 安徽 阜阳 236200)
0 引言
在煤矿井下目标定位中,为了满足事故应急救援、井下作业人员管理、煤矿物联网建设的需求,需要根据不同的场景建立不同的定位方法[1-2]。基于时间测距的定位方法所需定位设备较少,原理简单,定位精度只与发射设备和接收设备之间信号传输时间有关,且受巷道及支护中导体和设备的影响较小,因此在煤矿井下目标定位中得到了较广泛的应用。基于时间测距的定位方法主要包括到达时间(Time of Arrival,TOA)、单程测距、双程测距、对称双边双程测距方法(Symmetrical Double-Sided Two Way Ranging,SDS-TWR)等。TOA定位方法,即从目标发出信号开始计时,到接收器接收到信号时停止计时,根据传输时间进行定位,对发射设备和接收设备时钟精度要求非常高,并且要求同步校准[3]。单程测距方法利用信号在发射节点和接收节点之间传播的时间计算距离,实现目标节点定位,在理想状况下,系统同步时延为零,此时为无误差测距;当同步时延不为零时,随着同步时延的增长,所测距离误差也同步增大,因此同步时延的大小对目标位置的精确度影响极大。双程测距通过双向信号传输实现测距,其定位精度受处理时延和计时器频率偏移的影响较大。SDS-TWR是在双程测距过程基础上再进行一次双向信号传输过程实现测距。许多学者对基于时间测距的定位方法进行了大量研究,陈莉等[4]研究了双向单程测距中由相位噪声引起的测距误差,重点分析了双星时标偏差与相位噪声耦合效应对测距精度的影响,得出相噪测距误差与频率源相位噪声及时标偏差之间的定量关系,进而提出了对时钟偏移、频率偏移等误差进行抑制的方法。张健等[5]提出了一种改进的无线传感器网络到达时间定位算法,该算法无需额外的硬件支撑,以接收节点回复时间信息的方式消除时间同步误差,采用多次测量结果取平均值的方式削弱随机噪声的影响,但该算法采用平均值方法进行求解,当异常数据较大、较多时,存在较大误差。张林山等[6]分析了影响TOA定位精度的误差源,即定位过程中存在处理时延、频率偏移系数、温度、湿度等干扰因素,这些干扰因素在定位过程中如果不加以抑制,将存在较大定位误差。以上基于时间测距的定位方法由于没有进行有效的时钟同步及误差抑制,导致定位结果存在较大误差。鉴此,为有效抑制时钟未同步、设备时延、频率偏移系数等计时误差,本文结合SDS-TWR定位方法[7-8],定义目标节点既是发射节点又是接收节点,提出了基于差分误差抑制优化方法的井下目标定位方法。仿真分析验证了该方法的正确性。
1 差分误差抑制优化方法
SDS-TWR方法通过计算信号在发射节点与接收节点双程往返传播的时间进行定位,其距离计算公式为

(1)
式中:c为光速;t1为发送节点从发出信号开始至接收到接收节点发出反馈信号为止所用的时间;t2为反应时间,即接收节点从接收到发送节点的信号起,到接收节点发出反馈信号的时间;μ1为发送节点内部频率偏移系数;μ2为接收节点内部频率偏移系数。
由式(1)可知,-(μ1t1-μ2t2)为双程测距误差,其误差值由t1,t2,μ1,μ2决定,其中t1和t2无法避免,为系统误差;μ1和μ2为发送节点和接收节点内部存在的频率偏移,对测量结果精确度影响较大。如要在一维系统中进行精确定位,必须克服设备时延和计时器频率偏移等计时误差[9-10]。基于设备时延、计时器频率偏移、节点时钟未同步等干扰因素,本文主要考虑一维巷道间的定位问题。SDS-TWR方法原理如图1所示。
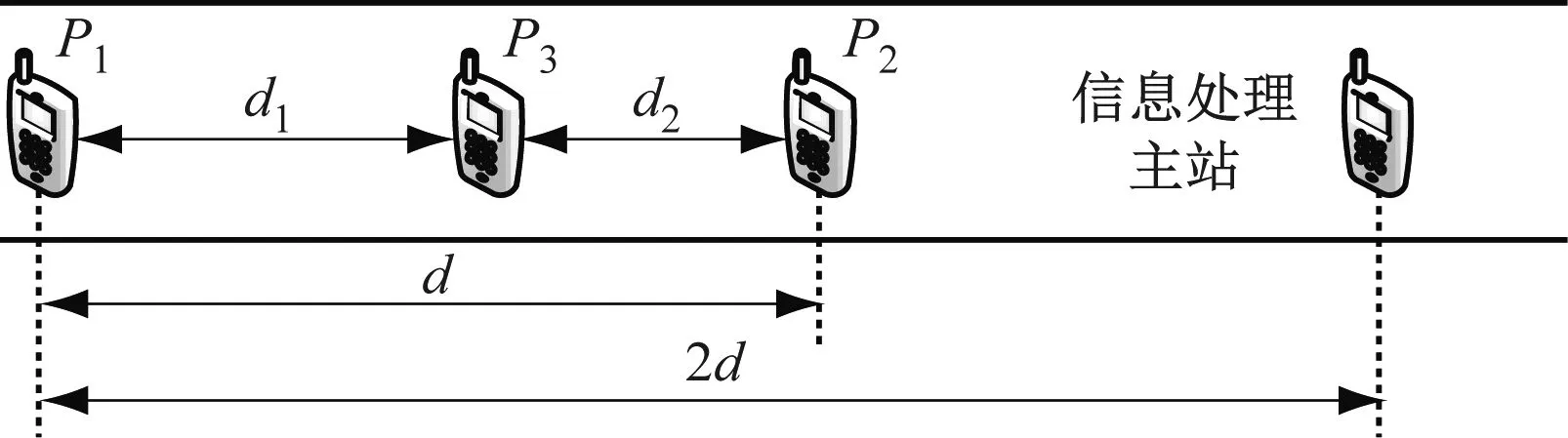
图1 SDS-TWR方法原理Fig.1 Principle of SDS-TWR method
设未知节点为P3,已知节点为P1,P2和信息处理主站,在节点P1,P2和P3都装设一个光传感器和计时器。当每次发送节点与接收节点之间处理时延大小相等时,SDS-TWR定位方法能够有效抑制计时误差;当时延不一致时,此方法不能有效抑制计时误差。为此,在SDS-TWR定位方法的基础上提出了差分误差抑制优化方法。该方法设置目标节点既是发射节点又是接收节点,从而可有效避免节点间时钟未同步带来的误差,并在SDS-TWR定位方法基础上加以扩展创新,将传输时间及长度关系联立求解,通过矩阵形式,消除设备时延、计时器频率偏移等无关变量,得到未知目标节点的坐标仅与实测时间值有关的距离公式,从而达到精确定位的目的。
由图1可知,节点P1和P2之间的距离为d,P1和信息处理主站之间的距离为2d,为已知值。设P1和P3之间的距离为d1,P2和P3之间的距离为d2,为待测值。节点P1,P2和P3使用相同型号的计时器和处理器,这样可以减少无关因素的影响。在SDS-TWR定位方法的基础上,利用如图2所示的发送节点和接收节点之间的信号收发方式和计时方式,得出一维通道中相应时间值t13,t12,t21,t23,t31,t32。
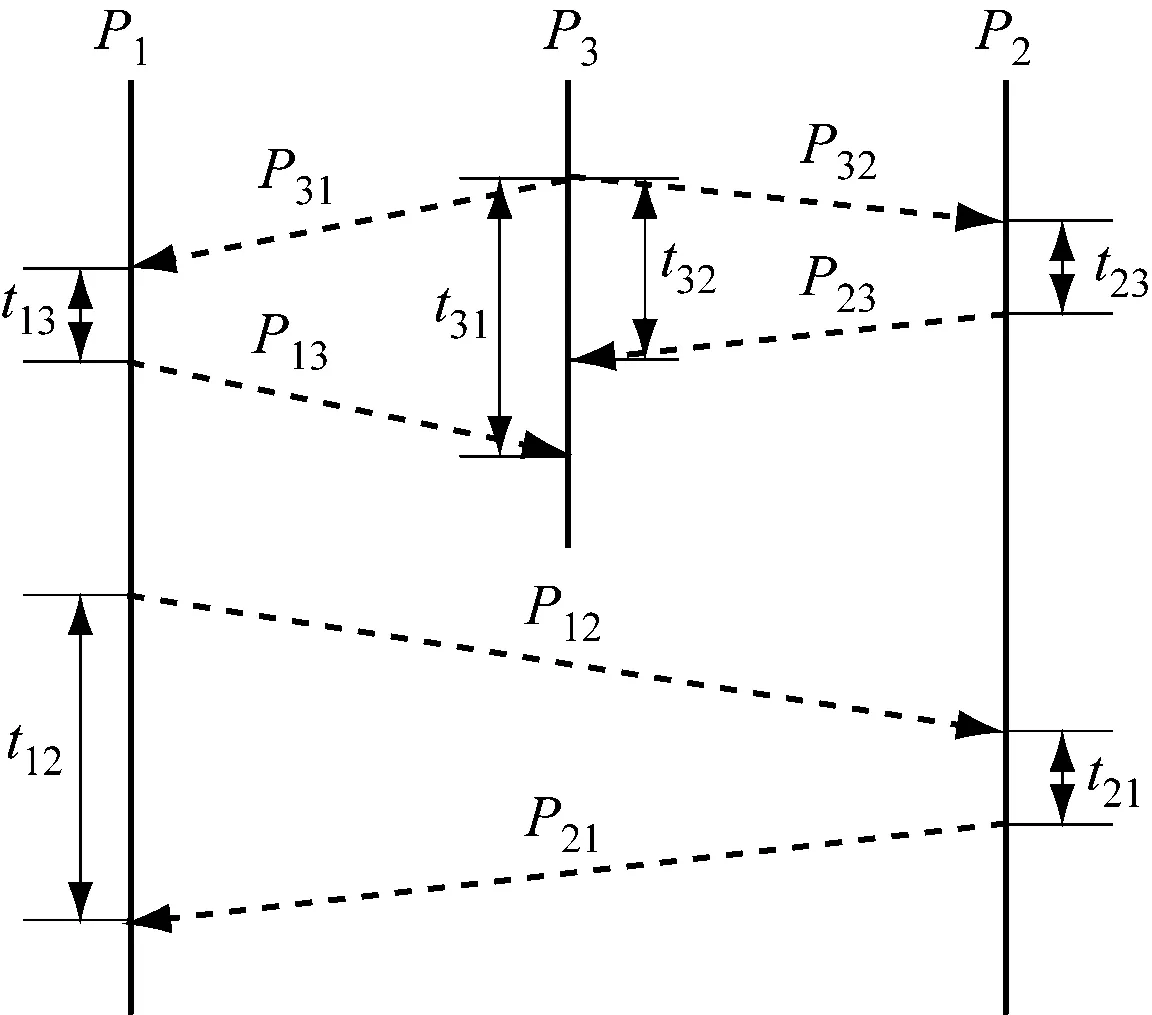
图2 信号收发及计时方式Fig.2 Signal receiving and transmission and timing method
(1) 节点P3分别向节点P1和P2发出信号P31和P32,开始记录时间,记为t31和t32。
(2) 当节点P2收到信号P32时,向节点P3回复信号P23,计时为t23。
(3) 当节点P1收到来自节点P3的信号P31时,向节点P3回复信号P13,计时为t13。
(4) 当节点P3收到信号P23和P13时,结束计时,记录时间为t32和t31。
(5) 节点P1向节点P2发送信号P12,开始记录时间,记为t12。
(6) 当节点P2收到信号P12时,向节点P1回复信号P21,计时为t21。
(7) 当节点P1收到信号P21时,结束计时,记时为t12。
(8) 节点P3和节点P2分别将所测时间t32,t31和t23,t21发送至节点P1。
在节点P1和P2之间计算时间t12时,通过距离、速度、频率偏移的关系可以构建如下等式关系:
(2)
(3)

IEEE802.11中规定,各个设备的时钟频率偏移不允许超过±25×10-6,本文经过多次计算和测试,最终选择频率偏移范围为±1×10-6。
距离、速度、频率偏移存在如下函数关系:
(4)
(5)
(6)
同理可知,节点P3与节点P1,P2之间的传输时间关系为
(7)
(8)
式中μ3为已知节点P3的频率偏移系数。
由图1可知,节点P1,P2和节点P3之间存在以下位置关系:
d=d1+d2
(9)
联立式(6)—式(9)可得
(10)
联立消去μ1、μ2和μ3可得
(11)
联立式(9)和式(11)可得到差分误差抑制优化方法的距离计算公式为

(12)
由式(12)可知,差分误差抑制优化方法中,距离d1和d2与各个节点频率偏移系数μ1,μ2,μ3及同步时延和处理时延无关,仅与各个节点所测时间t13,t12,t32,t31,t23,t21和速度c有关,从而达到了误差抑制的效果。
2 仿真与分析
为了验证差分误差抑制优化方法定位结果的可靠性,在Matlab仿真软件中进行了实验。选择如图3所示的远距离传输塑料管道模拟煤矿巷道,以避免干扰噪声的影响。本文模拟测试煤矿井下未知目标节点位置的初始数据如下:d=4 000 m,同步时延小于±1×10-6s,计时器频率偏移不超过±1×10-6,处理时延[11]小于4 μs。在同一环境下比较计时误差对单程测距、双程测距和差分误差抑制优化方法定位结果的影响,每种定位方法在Matlab仿真软件中都重复模拟1 000次,仿真结果如图4所示。仿真实验得出计时误差对单程测距、双程测距与差分误差抑制优化方法影响的误差区间最值见表1。
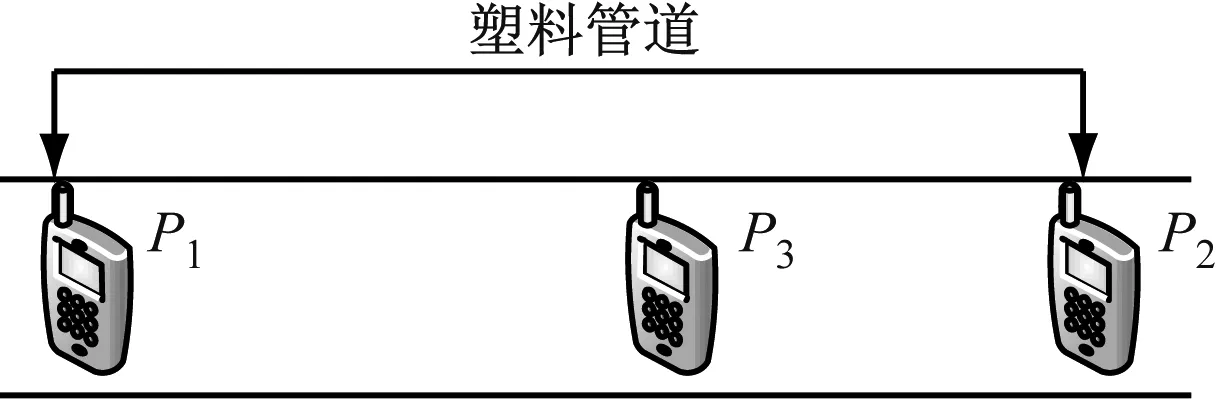
图3 测试环境Fig.3 Test environment
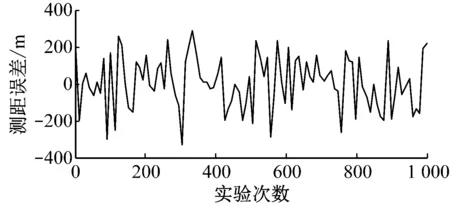
(a) 单程测距

表1 误差区间最值Table 1 Maximum error range
由图4、表1可知,单程测距误差最值区间为[-320.351 2 m,298.564 2 m],最大误差值比较大,严重影响测距结果,很难满足现实精度要求,造成误差有两方面原因:一方面是因为系统存在较大同步时延,另一方面是因为忽略了系统频率偏移的影响。双程测距误差最值区间为[-59.988 7 m,61.877 9 m],误差最值相较于单程测距误差大大减小,可以满足大部分对测试环境误差要求不高的场景,但是对精度要求比较高的环境中,还远远不能达到要求。差分误差抑制优化方法的测距误差最值区间仅为[-0.036 9 m,0.037 7 m],大大缩小了测距误差,误差是单程测距误差的0.012%,是双程测距误差的0.061%。
差分误差抑制优化方法的实测结果如图5所示。在实验中每间隔3 m通过使用差分误差抑制优化方法进行若干次测量并求取平均值,从最值区间可以得出,使用差分误差抑制优化方法可以精确定位出未知节点的坐标。
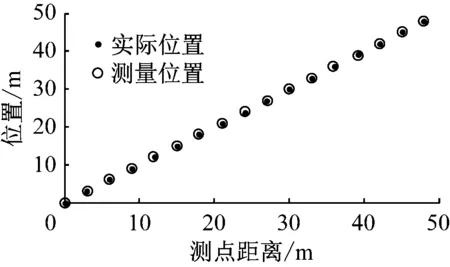
图5 实测结果Fig.5 Measured results
3 结论
(1) 基于时间测距的定位方法的定位精度主要受到节点间时钟未同步、计时器频率偏移、设备时延等计时误差的影响。为了有效抑制计时误差对基于时间测距定位方法的影响,提出了基于差分误差抑制优化方法的井下目标定位方法,该方法将到达时间及长度关系联立求解,通过矩阵形式,消除计时误差,得到未知目标节点的坐标仅与实测时间值有关的距离公式,从而达到精确定位的目的。
(2) 仿真测试结果表明,差分误差抑制优化方法能够有效抑制计时误差对基于时间测距定位方法的影响,能从根本上消除同步时延、处理时延、频率偏移系数对定位结果的干扰,能对未知节点进行精确定位,定位精度高,测距误差区间仅为[-0.036 9 m,0.037 7 m],是单程测距误差的0.012%,双程测距误差的0.061%,可满足远场井下定位精度的要求。