伺服电机NCS 神经网络PID 趋近律滑模控制*
2020-09-23郑晓晨
郑晓晨
(江苏经贸职业技术学院,南京 211168)
0 引言
网络控制系统由于其结构上的优点在航空航天、工业控制、电力设备等诸多领域得到了广泛的应用[1]。但是,该系统不包括网络引起的延迟,丢包、通信受限等,在控制系统的设计过程中,必须对上述问题予以充分考虑,避免造成控制器失稳的问题发生[2-3]。文献[4]针对网络控制系统中存在长时延、数据丢包的情况,设置缓冲区以处理数据包丢失,并从理论上分析固定延迟情况;文献[5]分析了短具有延迟和确定性丢包的网络控制系统的稳定性为系统的指数稳定性提供了充分的条件。但是上述文献对时延和丢包均进行了一些理想化处理,未能完全贴近实际网络控制系统。
滑模变结构的控制由于模型的鲁棒性而广泛地应用于非线性控制系统。参考文献[6]使用集成的滑模可变结构的控制器可以用来有效抑制滑模变对负载干扰的产生和影响;通过将文献[7]与互补的滑模面和广义滑模面结合使用,可以看到以这种方式可以适当地抑制颤动效果;文献[8-9]通过一个后推滑模控制器来抑制抖动幅度,从而获得了良好的结果。但是,上述文献集中在如何减少抖动方面,没有全面考虑滑模控制的整体性能优化,而是考虑了系统数据包的丢失和延迟。
针对上述问题,提出一种基于滑窗多核LS-SVM 在线预测补偿方法和神经网络pid 趋近律滑模方法。
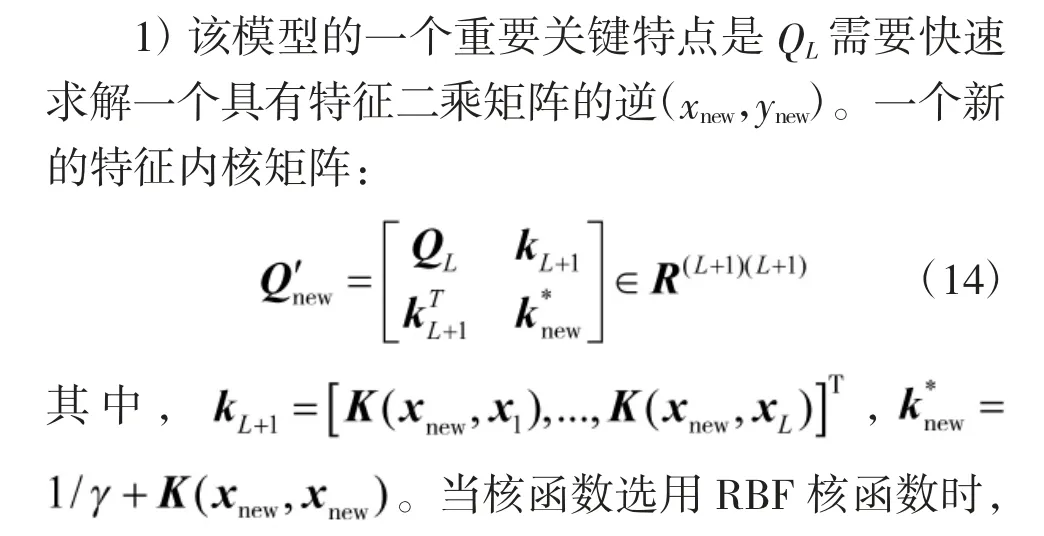
1 系统建模
直流高压伺服电机驱动器发电机NCS 每个传感器和每个命令行的执行器,都必须是一个特定时间点的戳和事件驱动的,控制器必须是事件驱动的,数据文件包必须是一个特定时间点的戳和一个单或多数据文件包的同时传输。预期在传输期间不会干扰数据包。它结合了传感器数据传输延迟和受控变量传输延迟。基于此,建立离散系统模型
在图1 中,控制对象的状态x(k)分成了m 数据包并发送到控制器,控制器接收的数据如下所示:
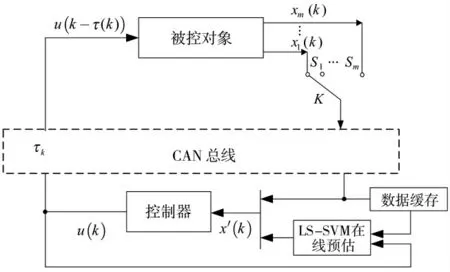
图1 丢包补偿器的多包传输NCS 结构

如果在系统发送数据时发生数据包丢失,则预测器会更正并更新未更新的数据。那么式(5)可以写成:

总而言之,具有可用丢包补偿功能的延迟直流伺服电机的NCS 模型为:
2 滑动窗口组合核LS-SVM 在线预估
SVM 原理表明,核函数的选择对最终回归预测有很大影响。不同的高斯核函数可以具有不同的泛化特征,因此,核函数具有不同的泛化预测学习效果。高斯核函数作为一个局部的核函数,具有学习的能力强,泛化能力弱的基本特点,而高斯乙状核函数作为一个全局的高斯核函数Kg,具有了泛化能力强,学习能力弱的基本特征。为了最大化预测准确性和泛化函数,将Kg内核函数定义为以上两个内核函数的线性组合:

满足并求解了相应核函数的权重(式(10)),以得到最小二系数之和,以获得最小二系数相乘支持的向量代数回归模型:
直流伺服电机网络控制系统在实际工作的过程中会自动产生大量的工作过程数据。系统在线建模过程需要一个新的工作过程来用于跟踪系统的工作动态和特性。它有助于吸收新的信息并更好地保持样本的大小。在线建模的基本思想是滑动时间窗口策略,该策略吸收最新样本,删除最旧样本并且不更改样本大小。
滑动时间窗口策略如图2 所示。每当时间窗口L 移动时,训练样本也会移动。时间窗口的宽度设置与样本数量成比例。
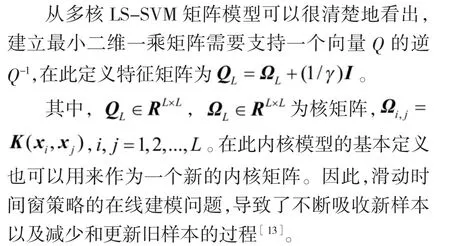
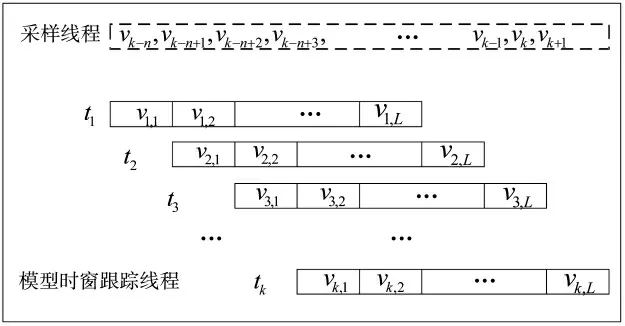
图2 滑动窗口策略示意图


上述过程是循环返回过程。随着采样的L 进行,用于建模的样本始终是最新的。即滑动时间窗口被在线移动。
3 神经网络滑模控制器设计
3.1 PID 趋近律分析

基于以上分析,所提出的PID 方法满足了滑模的存在和到达。
如果系统尚未到达滑模表面,则积分项的作用为0,因此,s(t)=0 通过求解方程式(),系统首次到达滑模表面所需的时间为:
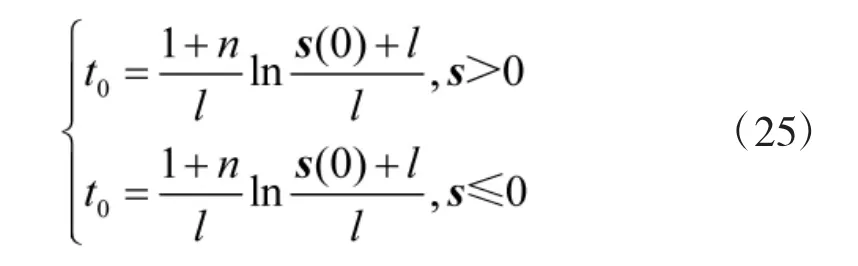
式(25)看出,到达时间t0是一个有限值。
直流伺服电动机网络控制系统的补偿模型显示了式(8)的相应状态空间模型。给定两个状态变量,离散滑模控制滑模表面设计为:

其中,F 为滑模面常数矩阵。式(6)等价于:
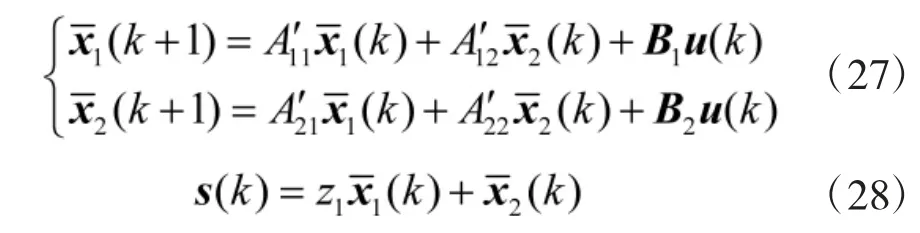
已知第1 次到达滑模面时满足如下条件:

联立式(27)和式(28)可得:

确定k 之后,则可解得滑模面常数矩阵F 为



然而,从文献[14]可以清楚地看出,方程(32)的数学条件仅仅是任何存在一个离散准确光滑模型中运动的必要条件,不是充分的数学条件。为了解决这个问题,Sarpturk 提出了一种离散滑动模式以达到足够的条件

根据连续进近分析,离散滑模表面函数可以表示为:
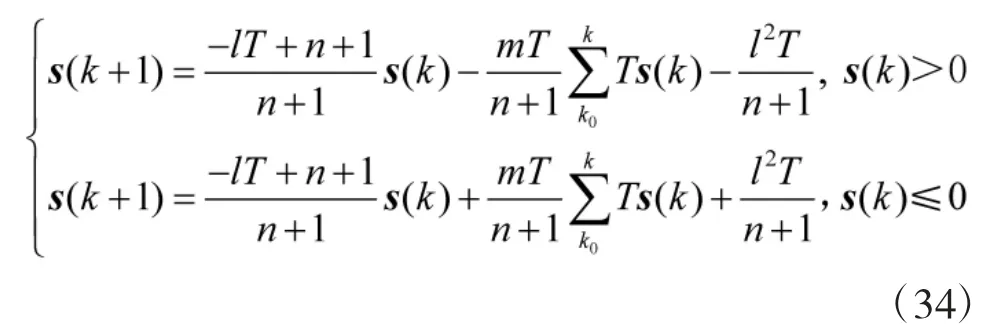
从式(34)可以看出,无论此时s(k)>0 的微控制器s(k)≤0 系统是否完全能够保证满足式(33)的温度稳定性要求。为了进一步研究分析这种基于RBF-PID 网络逼近相关方法的模型神经网络连接滑模逼近控制器的性能稳定性,将Lyapunov 代入函数表中定义的最大值为:

可得

由于满足式(35),所以,ΔV(k)<0,因此,可以证明该滑模控制器渐进稳定。此时,等效控制u(k)为式(22)所示。
3.2 神经网络PID 趋近律
保证控制速度的同时,实现PID 方法定律以保持较小抖动的能力取决于3 个参数的选择:比例、积分和微分。为了实现有效的滑模控制,必须根据到达滑模表面所需的时间来自适应地调整3 个参数。因此,考虑到神经网络的强大非线性映射功能,可以直接提出一种基于模型神经网络的r 和pid 逼近方法网络逼近滑模控制器相关参数的网络滑模逼近控制器[15]。
本文应用的是广义网络RBF,且结构图如下页图3 所示。

图3 广义RBF 网络结构图
如果“基本函数”是高斯函数,可以表示如下:
4 仿真验证
直流发电机伺服负载在发电机网络自动控制系统的状态采样周期一般定义为0.1 s。参数矩阵被定义为:
定义时延状态转移矩阵
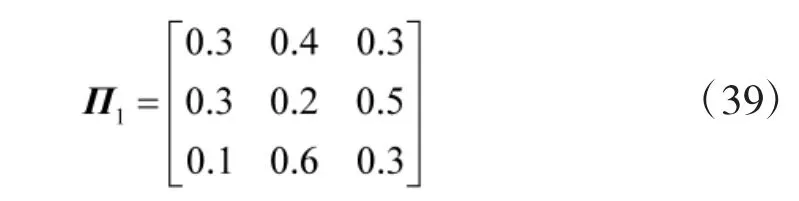
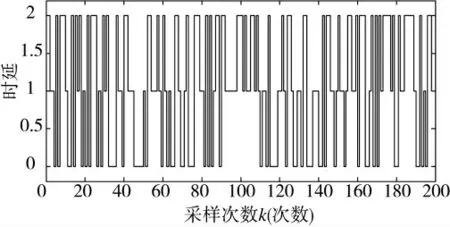
图4 时延分布图
未来被丢弃的系统惩罚效果因子中的数据和封包数量可以直接用于优化训练,通过优化训练可以获得更好的系统惩罚效果因子C=196,核离子函数参数的值为0.9,并且两个核函数相对应。权值分别是ω1=0.681,ω2=0.319。
相应地,滑模控制器参数的初始值为比例系数l=30、积分系数m=1、微分系数n=5,神经网络层数设置为8,隐藏层中神经元数为4。使用训练样本获得相应的加权因子,然后从极点位置计算出滑模表面常数矩阵

可以根据式(39)进行计算控制变量。使用Truetime 进行模拟和验证。首先,验证了基于滑动窗口多核LS-SVM 数据在线的预测和补偿。两个数据包变化和丢失率的平均值分别显示为30%和60%。图5 显示了基于滑动窗口策略使用的单核LS-SVM和多核LS-SVM 传感器执行丢包数据在线预测和补偿时的在线预测补偿比较的结果。
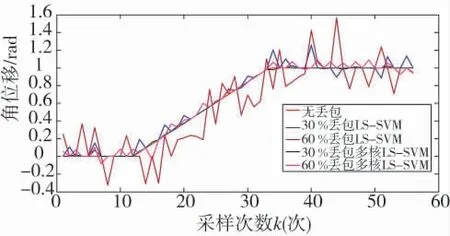
图5 丢包预测与补偿比较
图5 中的最大丢包机概率曲线预测结果曲线和信号补偿器的曲线计算分析结果表明,即使用的是一个单核的最大丢包机概率通常为30%或60%,多核LS-SVM 最大丢包机概率的曲线预测也非常容易接近于一个无最大丢包机概率的多核状态信号转换器的测量结果曲线。单核LS-SVM 主要设计用于进行状态信号转换的精度测量。此外,如果丢包率很小,则基本上可以重现状态的变化。
此外,考虑在线的滑模校正对不同滑模和丢包率的带补偿神经网络进行滑模校正控制的影响。如图6 所示,对比了无补偿神经网络滑模控制与多核LS-SVM 在线补偿神经网络滑模控制的滑模校正响应。无论模态丢包率是30%还是60%,基于模态的多核LS-SVM 在线校正的带补偿模态神经网络、多核滑模校正控制的丢包率响应速度,以及在线校正稳态的性能都与校正率是相同的,而且对于没有带补偿神经网络的多核采用滑模校正控制。数据校正表明,对数据包进行在线预测和校正可以提高丢包情况下神经网络滑模控制的有效性,在一定的条件下可以直接达到较好的丢包率控制效果。
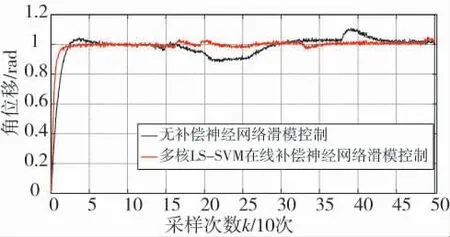
图6 30%丢包率条件下控制对比
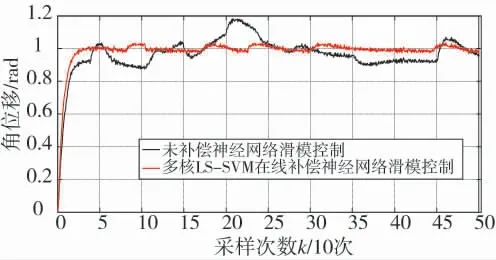
图7 60%丢包率条件下控制对比
为证明神经网络PID 趋近律滑模控制的优给定20%的跟踪载波逼近信号用于丢包的频率,阶跃时的信号通常等于1。角位移的电源响应电路曲线形式如图8 所示,相应地,直流电动机电压稳态控制信号输出放大器的电路响应曲线如图9 所示。
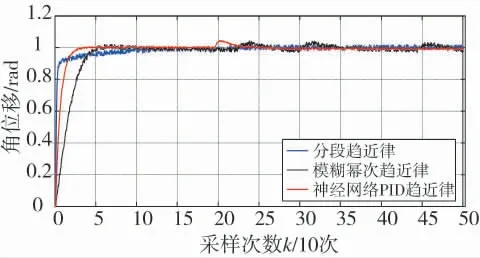
图8 不同趋近律滑模控制效果对比
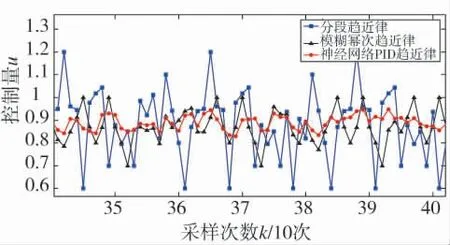
图9 不同趋近律滑模控制效果放大图
表1 显示了100 个采样周期后的特定稳定颤动结果。
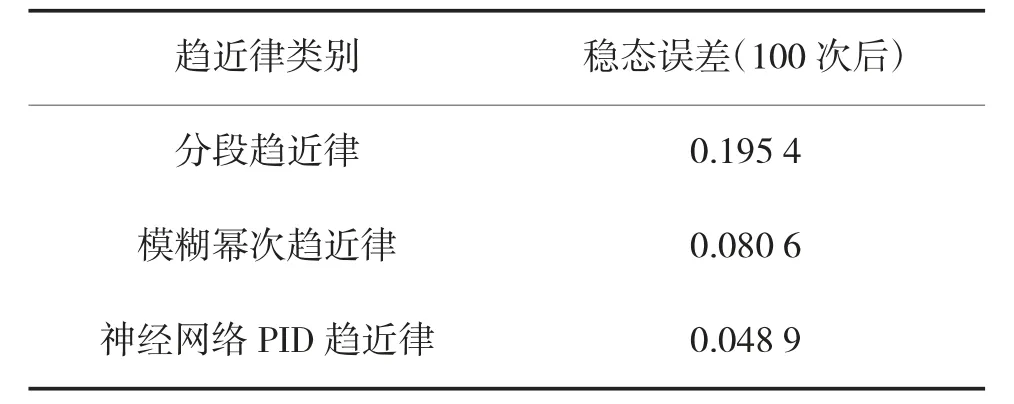
表1 稳态抖振结果对比
从以上方法进行比较的结果可以明显看出,分段抖动逼近控制方法虽然具有最快的初始抖动响应速度,但其初始响应抖动的幅度平均值,明显地要大于其他两种分段滑模控制方法的初始抖动响应幅度值。与分段方法相比,模糊功率方法可显著减少颤动,但其响应协调时间会显著增加。神经网络PID 方法定律滑模控制抖动幅度值极小,响应稳态曲线迅速地上升至目标值,保持较小的响应稳态误差。
通过受控变量的响应曲线分析采用不同方法的颤动情况。表2 显示了100 个样本后各种进场规则的平均稳态误差。神经网络PID 逼近律的滑模控制平均稳态误差明显小于其他两种逼近律的滑模控制的平均稳态误差。
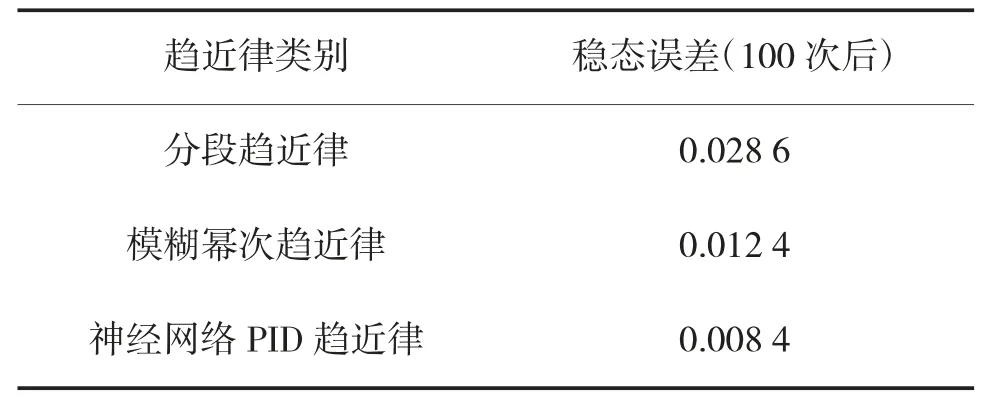
表2 控制量抖振结果
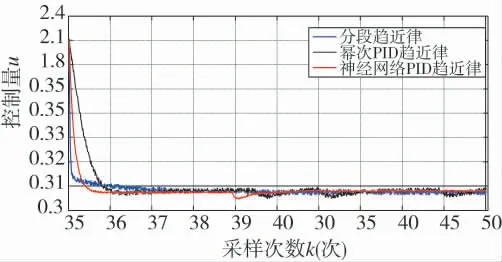
图10 不同趋近律控制量对比
原因分析:分段趋近律根据与滑模表面的距离在两种进近之间切换。在响应的早期阶段,主要考虑了逼近速度,因此,响应速度更快,切换逼近方法之后的主要考虑因素是减少抖振并迅速稳定。但是,由于状态变量尚未到达滑动模式表面,因此,切换后方法不仅在减少抖振方面不起作用,反而使得响应缓慢。此方法的切换时间选择对最终控制效果有很大影响,因此,具有鲁棒性,并且响应速度更快。如果积分系数大,则抖振幅度小,稳态误差小。
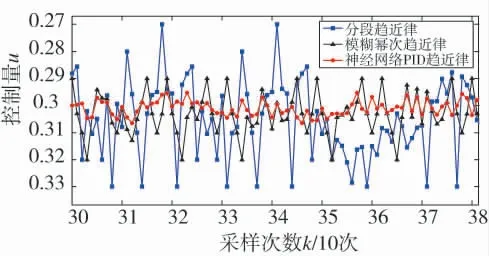
图11 不同趋近律控制量放大图
5 结论
本文提出并成功地实现了一种基于滑窗策略的多核LS-SVM,可以在线控制和预测丢包补偿系统的神经网络pid 逼近滑模控制器,并将其控制系统实现为一种具有延迟和丢包的多包数据传输直流控制器的伺服驱动电机神经网络自动控制补偿系统。仿真得出以下结论。
1)将具有停滞固定的时间系统预测转换过来成为一个无停滞时间的系统。基于分布式滑动窗口多核LS-SVM 在线丢包预测的分布式丢包时间补偿系统预测,可以有效保证在一定的丢包时间条件下的分布式系统运行稳定性,并使系统具有较好的稳定性和补偿效果。
2)神经网络PID 逼近律滑模控制,可以保证比分段逼近律和模糊功率逼近律更快的响应速度,但是考虑到响应速度和颤振,也可以减小抖动幅度值。
3)滑动窗口基于在线校正条件的多核LS-SVM 神经网络PID 滑模控制器,可以更好地实现跟踪控制,且具有良好的丢包性补偿性能。
