航向陀螺漂移误差快速测试方法研究
2020-09-21陈池礼成都国营锦江机器厂
陈池礼/成都国营锦江机器厂
0 引言
传统的航向设备主要由感应式磁传感器、机械式航向陀螺和协调放大器等组成,最终通过航向陀螺输出航向信号,航向指示器接收该信号实时指示飞行器的航向角度,飞控系统接收该信号控制飞行器按预定航向飞行。根据航向设备的工作原理,航向陀螺的输出精度直接受制于自身漂移误差的影响,因此,航向陀螺的漂移误差一直是航向设备的主要性能指标,需要在维护和修理时重点关注。
由于传统测试技术和测量仪器的限制,想要快速完成航向陀螺漂移误差的测试往往比较困难,目前为止最主要的方法仍然是通过测量航向设备在0°、90°、180°和270°四个方位工作30min或1h 后航向指示器指示的变化量大小来确定漂移误差是否合格。若不合格,调整产品后再重新测量,非常耗时耗力。能否利用先进的仪器与测试技术实现航向陀螺漂移误差的快速测试是本文研究探讨的目的。
1 航向陀螺漂移误差原理
航向系统中感应式磁传感器感受飞行器所处位置的地球磁场强度向量方向,为系统提供磁方位信号。航向陀螺为双自由度水平机械陀螺仪,利用高速转子的转轴稳定性即自转轴可长时间保持给定空间方向不变的特性,在陀螺航向状态下其是航向传感器,在磁航向状态下其是磁航向信号平均值的稳定器。两种工作状态下,航向信号均从航向陀螺的同一个自动同步传感器(通常为自整角机发送器)向用户发 送。
然而,再精密的机械陀螺仪在外干扰力矩作用下也不可能一直保持空间方向不变,由此产生漂移误差,因此,将在外干扰力矩作用下陀螺仪自转轴在单位时间内相对于惯性空间的偏转角称为航向陀螺漂移误差(或漂移率),其单位是°/h。航向陀螺漂移误差是衡量航向陀螺仪精度的主要性能指标,漂移误差越小,陀螺仪精度越高。
目前,航向陀螺漂移误差指标基本在±1.5°/h ~±3.5°/h 之间,整个系统的航向误差能达到1°左右,航向指示器的最小刻度分辨率基本也达到1°。若只利用航向指示器的指示读数来测量漂移误差,往往需要花费较长时间才能得到相对准确的测量结果,特别是在航向陀螺的维护修理工作中。重新装配后的航向陀螺的漂移误差性能调整的可能性很大,且有时需反复调整。因此,研究必要可行的漂移误差快速测试方法对于提高工作效率意义显著。
2 机电同步测量法
航向陀螺漂移误差机电同步测量法的主要技术思路是,通过高精度自整角接收机同步航向陀螺自整角发送器的航向角度,输出与航向角度瞬时变化值相应的微弱交流信号,经交流放大器放大,一路输给跟随测量电路的微电机控制绕组,以控制电机的转速(对应于航向角漂移的大小),一路经相敏整流后控制电机的转向(对应于航向角漂移的方向),再利用该电机带动的测速发电机输出相应的直流电信号,经电流变换,控制电流表指针的相应指示,再将漂移误差的大小与电流表指针偏转量的对应关系转换为刻度,即实现航向角漂移误差的测量。
由于航向陀螺的漂移误差小,实时的角度变化量更是微乎其微,因此要求自整角接收机具有很高的灵敏度,同样经其转换输出的实时信号也非常微弱,后级的交流放大器必须具有很高的放大倍数且自身的噪声必须很低,在此基础上,必须使用高速微电机以再次提高系统的灵敏度,将细小的电压差转换为较大的转速差。可见,机电同步测量法的技术原理虽不复杂,但其工程化的实施却相当困难,实现成本较昂贵。一方面,整个跟踪测量系统通过多级齿轮传动,特别是要在自整角接收机端部产生微小的角度变化,则在齿轮齿部和间隙处必然出现较明显的迟滞和过量,导致系统存在周期性摆动,需通过观察指示表指针摆动的平均值来得出最终的漂移误差大小;另一方面,由于航向陀螺的实时角度变化量太小,自整角接收机的灵敏度和输出端部的齿轮传动分辨率无法做到真正的实时,只有通过一定的时间积累才能实现航向角度变化量的传递,往往需要等待一段时间(通常3 ~5min)才开始读数。
3 S/D 数字测量法
航向陀螺漂移误差S/D 数字测量法的技术思路是,利用高精度自整角机—数字转换器(S/D 转换器),直接将自整角航向角度信号转换为数字信号,再利用单片机(或计算机)和软件处理计算得出航向角度值和漂移误差。
目前,国内商用S/D 转换器的位数大多为10 位、12 位、14 位和16 位,各位数对应的角度分辨率如表1 所示。
理论上,S/D 转换器的最高转换精度是指没有任何转换误差时的角度分辨率,但因实际转换中存在非线性、信号噪声、干扰等因素,精度与分辨率的差距会随着分辨率的提高而增大,如10 位S/D 转换器的精度基本能达到±0.4°,而16 位S/D 转换器的精度可能就只稍优于±19.8″。可见,对于航向角度,只需10 位的S/D 转换器就能实现高精度的测量,但对于角度的变化速率即航向系统指标中的协调速度和漂移误差测量来说,则是速度越低越不易测量。如协调速度为1°/min(60″/s), 即按秒实时测量1°/min 协调速度需要的S/D 转换器的分辨率优于60″,对应的位数至少需15 位。因此,工程中采取了时间换分辨率的方法,即延长测量时间累积读角度变化量(或测量角度变化量所需的时间)的方式,实现利用低位数S/D 达到高位数S/D 才能测量速度的能力。具体原理是:将测量间隔时间增大到使该间隔时间所对应的角度变化量大到能被S/D 转换器所识别(或测量S/D 转换器输出值变化时所对应的时间间隔),将测得的角度变化量除以时间间隔,计算出角度的变化速率。如测量1°/min 的协调速度,采用14 位 S/D 转换器时应将测量时间间隔增大到2s 以上,采用12 位S/D 转换器则应增大到6s 以上,这样即能基本快速实现对1°/min 协调速度的测量,且设置间隔时间越大(测量速度越低),测量的精度越高。
对于更低角度变化速率的漂移误差,其测量要求更高。如漂移误差为1°/h(1″/s),即按秒实时测量1°/h漂移误差需要的S/D 转换器的分辨率为1″,对应的位数至少需21 位,若采用16 位S/D 转换器测量需将时间间隔增大到20s,采用14 位S/D 转换器则需增大到80s。同时,由于角度变化速率太小,对测量时初始角度的不确定性引入的误差必须加以考虑,即S/D 转换器输出的第一次角度变化量Δθ1对应的时间间隔Δt1并不准确,应舍去;第二次开始的Δθ 与Δt 才能代表该次角度变化量与对应的时间间隔。同时,由于S/D 转换器精度和航向陀螺的微观不稳定性,单次测量只能代表“瞬间”速度,为了提高测量的可靠性,原则上应测量三次以上,并考虑到航向陀螺的漂移误差与时间成累积关系的规律,进行数据融合处理。具体的测量程序是:

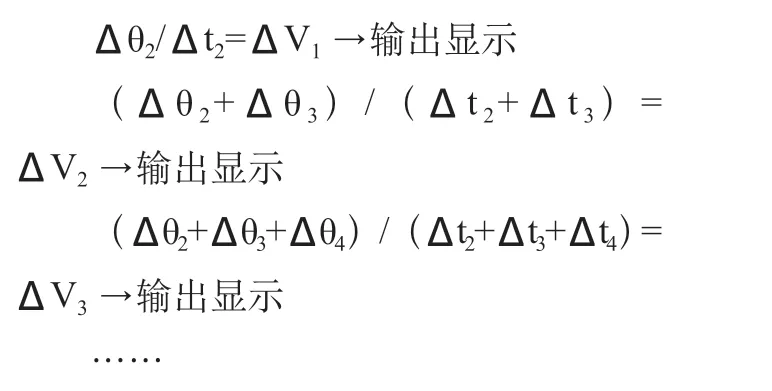
逐次测量的输出显示是为了满足测量速度需要,多次的测量和数据融合是为了满足测量精度的要求。
可见,对于不小于1°/h 漂移误差的测量,采用16 位S/D 转换器的测量响应时间约为40s,测量结果读数时间约为80s,测量速度明显优于传统方法,即利用秒表监测30min 时相对漂移值与平均值之差的方法,测量精度也有所提高。但若采用14 位S/D 转换器,测量速度将下降4 倍,效果变差很多。
4 电压测量法
近年来,随着技术进步和成本下降,超高精度数字多用表越来越多地进入日常工作现场,为采用电压测量法测量航向陀螺漂移误差提供了可能。具体实现的原理如下。
设定用于自整角机的激磁电压u=EoSinωt,则自整角机输出的电气信号表达式如下:
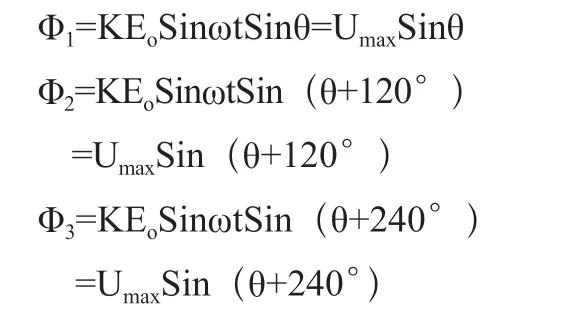
这里,Φ 为自整角机输出角度信号的线电压,其中Φ1为Ⅰ相与Ⅱ相间的线电压,Φ2为Ⅰ相与Ⅲ相间的线电压,Φ3为Ⅱ相与Ⅲ相间的线电压。θ 是自整角机轴角。在0°、90°、180°和270°四个方位附近时,标准自整角机输出的信号电压与角度的对应关系如表2 所示。

表1 国内S/D转换器的角度分辨率
由 表2 可 见,1°/h 漂 移 误 差 的自整角航向角度信号每1 秒角电压变化量,对于26V 标准来说:0°方位时Φ1为0.126mV、Φ2为-0.063mV、Φ3为-0.063mV,90°方位时Φ1为0mV、Φ2为-0.109mV、Φ3为0.109mV,180 °方 位 时Φ1为-0.126mV、Φ2为0.063mV、Φ3为0.063mV,270 ° 方位 时Φ1为0mV、Φ2为0.109mV、Φ3为-0.109mV。对于57V 标准来说:0°方位时Φ1为0.276mV、Φ2为-0.138mV、Φ3为-0.138mV,90 °方 位 时Φ1为0mV、Φ2为-0.239mV、Φ3为0.239mV,180 °方 位 时Φ1为-0.276mV、Φ2为 0.138mV、Φ3为0.138mV,270°方位时 Φ1为0mV、Φ2为0.239mV、Φ3为 -0.239mV。可见,在0°和180°方位下Φ1的电压变化率最大,90°和270°方位下Φ2与Φ3的电压变化率较大;对于相同的自整角机,电压标准越高,灵敏度和精度越高。
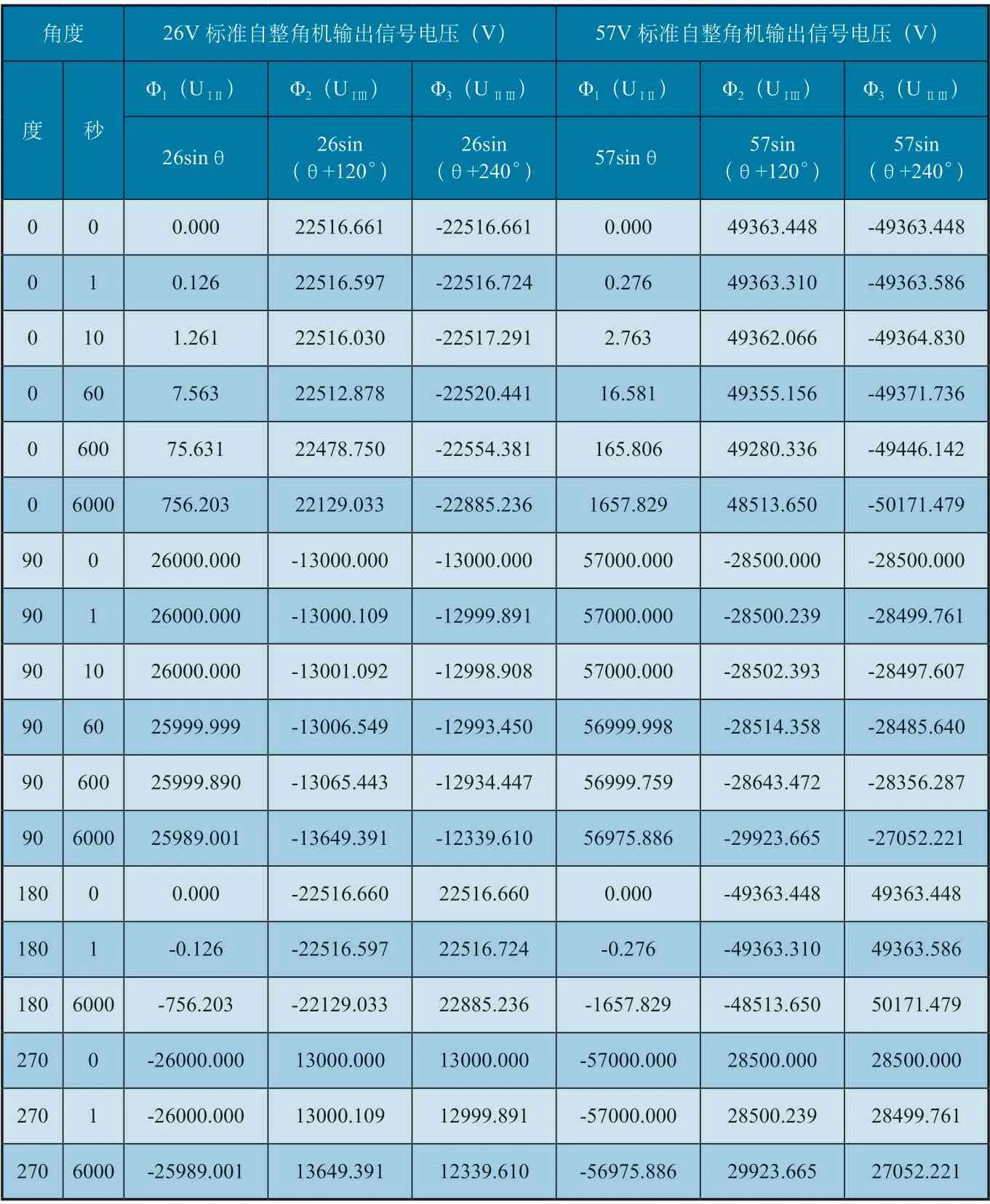
表2 标准自整角机理论输出信号
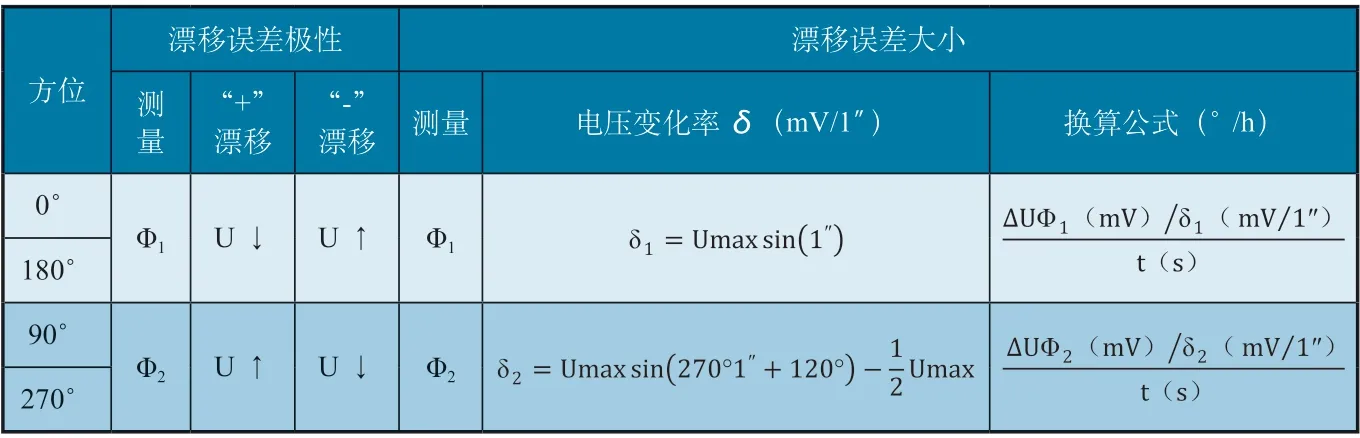
表3 电压测量法测量漂移速度(配合计时器)
由于自整角机的激磁和输出都是400Hz 交流电压,理论计算出此处正弦函数值的正负并没有实际工程意义,也无法通过电压测量法判断出0°与180°、90°与270°的差异,只能通过航向系统自身角度指示来辨别。
根据表2 的理论计算数据,0°、180°、90°和270°四个方位的漂移误差只需测量Φ1与Φ2(或Φ3)的电压变化情况就能相应地换算出结果,具体测量和换算公式如表3 所示。
电压测量法的测量速度取决于测量仪器的分辨率和精度。通常,航向系统的漂移误差指标范围为±(1°~4°)/h,按0.1°/h 分辨率,若选用六位半数字电压表,在0°和180°方位,设置1V 量程档(61/2 位),考虑到电压表本身的稳定度和不少于3 次的累积平均测量,约10s 能测量换算出漂移误差大小,在90°和270°方位,设置100V 量程档(51/2位),约100s 能测量换算出漂移误差大小;若选用八位半数字电压表,在0°和180°方位,设置1V 量程档(81/2 位),约5s 能测量换算,在90°和270°方位,设置100V 量程档(71/2 位),只需 约10s。
另外,正弦函数只在0°、180°、90°和270°四个方位点附近具有较好的线性度,因此,当航向系统自身的方位指示误差较大时(>1.5°),必须外用标准指示器进行准确设置,否则会影响测量精度。同时,由于电压测量法为开环测试法,自整角机输出的信号电压还与自整角机的激磁电压相关,因此电压测量法要求激磁电源具有较高的稳定度,否则将直接影响测量精度。

表4 航向陀螺漂移误差测量方法的优缺点对比
5 结论
根据对三种漂移误差测量方法的原理分析和技术特点介绍,总结出各自的优缺点,如表4 所示。
S/D 数字测量法和电压测量法无疑是建立在最新科技发展成果之上的,无论是精度、可靠性还是成本都具有不可比拟的优势,更适宜推广运用。本文探讨的思路可为相关测试设备和方法的研究提供参考。需指出的是,无论是何种测试方法,在实际工程运用中都需针对具体的对象进行适应性选择、优化和调试,才能最终获得满意的结果。
