七自由度碳纤维自动铺放装置结构设计研究
2020-09-15王明强张艺鑫张亚男
王明强,郭 昊,张艺鑫,张亚男
(江苏科技大学机械工程学院,江苏 镇江 212003)
1 引言
在传统机械行业中,使用的材料多为金属材料,如普通碳钢、合金钢等。经历过一定时间的发展后,碳纤维材料的高性能被人们所发现,开始应用在汽车、船舶以及航天等领域[1-2]。但是传统的碳纤维铺放方式多为手工,生产效率低,制造成本高,能够加工的碳纤维材料零件种类也有很大限制[3]。在国内,由于技术的不成熟,碳纤维复合材料并没有高效利用[4]。所以,需要对碳纤维的制造设备进行深入研究。
现有的五自由度甚至六自由度铺放设备,可以对一些曲面部件(如回流板、引擎盖)进行铺设,但在设备结构复杂的同时,灵活性却未能得到足够保障[5]。七自由度碳纤维铺放设备的铺放头部分拥有六个自由度,在定位和调节的功效上强于之前的设备,铺放动作灵活[6]。然而结构动态特性及其强度是否适宜对整个铺放机性能有着巨大的影响,其中结构的振动可以导致共振、噪声以及疲劳损坏;而结构的强度是安全的重要因素[7-8]。因此有必要在设计七自由度的碳纤维铺放设备的时候对其模态分析、静力学分析及其运动仿真。
2 七自由度碳纤维自动铺放结构设计
2.1 七自由度碳纤维自动铺放设备的总体设计
七自由度碳纤维自动铺放结构主要由主功能模块设计和辅助功能模块设计两部分组成,主功能模块由机械臂完成,机械臂采用龙门架结构设计。辅助功能模块进行夹紧、重送、剪切、加热、集合和施压功能,由铺放头完成。整个铺放装置的虚拟样机,如图1所示。

图1 七自由度碳纤维铺放设备虚拟样机Fig.1 Seven Degrees of Freedom Carbon Fiber Placement Equipment Virtual Prototype
2.2 七自由度碳纤维铺放设备移动部件分析
为了具备足够的灵活性和柔性,其机械结构主要由拥有六个自由度的机械臂(由3个直线移动自由度和3个转动自由度组成)、可旋转的芯模部件、以及具有夹紧、重送、剪切、加热、集合和施压功能的铺放头等组成。六自由度机械臂配合芯模转动,使铺放设备共计拥有七个自由度,通过机械臂和芯模转动轴调整铺放头与芯模表面的相对位置,保证了铺放功能优于传统装备。铺放设备移动部件简图,如图2所示。

图2 七自由度碳纤维铺放设备移动部件图Fig.2 Seven Degrees of Freedom Carbon Fiber Placement Equipment Moving Parts
图中:X轴—电机驱动,使铺放头沿X轴做直线运动;Y轴—电机驱动,使铺放头沿Y轴做直线运动;Z轴—电机驱动,使铺放头沿Z轴做直线运动;A轴—转动机械手与Z轴末端连接的部分的转动,带动铺放头做偏航运动;B轴—转动机械手的末端,带动铺放头做俯仰运动;C轴—转动机械手与铺放头相连部分的转动,带动铺放头做摆动运动;V轴—芯模的旋转运动。
电机D1工作,通过法兰盘的带动,使得转动箱绕A轴作偏航运动;电机D2工作,使同步带轮1转动,带动同步带轮2的转动,使得转动关节末端绕B轴作俯仰运动;电机D3工作,使同步带轮3开始转动,同步带传递扭矩至同步带轮4以及与之同轴的锥齿轮5。最后锥齿轮5和锥齿轮6啮合,改变转动方向,使得铺放头绕C轴作摆动运动。
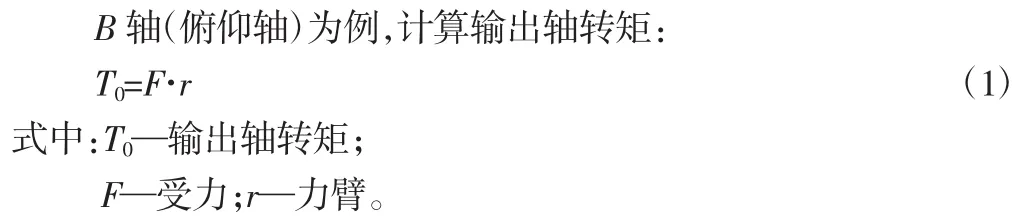
由于俯仰轴的作用是提升铺放头的部分,则俯仰轴的受力可近似为轴后连接的结构的重力,力臂可近似为轴线至重心的距离。取F=200N,r=0.1m,可得:T0=200×0.1=20N·m
根据输出轴转矩倒推电机轴转矩,

式中:i—传动比;η1—轴承效率;η2—同步带轮效率;已知 i=200,

七自由度碳纤维铺放设备转动关节结构简图,如图3所示。

图3 七自由度碳纤维铺放设备转动关节结构简图Fig.3 Seven Degrees of Freedom Carbon Fiber Placement Equipment Rotary Joint Structure
最终机械臂旋转关节模型,如图4所示。

图4 机械臂旋转关节模型Fig.4 Robotic Arm Rotation Joint Model
2.3 七自由度碳纤维铺放设备辅助结构设计
碳纤维铺放设备的工作实质,是将碳纤维丝束通过导向机构的牵引,进入铺放头中的丝束通道,经过一系列操作后,达到压辊部分,在施压、加热、集合模块的作用下压紧在芯模制品表面。每一个动作都可以通过气缸或电机完成,每一路丝束都能够完成单独控制,丝束间互不干涉。将铺放系统的过程进行简要描述:丝束先经过人工进入铺放头,之后重送模块将丝束用挤压力继续向前输送,过程利用重送电机和重送气缸带动模块工作;丝束进一步进给后,到达集合模块会聚在一起,再由加热模块对丝束进行加热,使其粘合在一起,最后,丝束到达施压模块,在压辊的作用下紧紧贴在芯模的表面上,形成铺放的工件,在这一步需要利用施压气缸的作用来为压辊提供压力;另外在铺放特定形状时,可能会需要剔除丝束,这时需要切断模块和夹紧模块工作,将丝束夹紧固定后切断,结束后再开启重送装置,重新导入丝束。至此,铺放过程流程完毕,如图5所示。
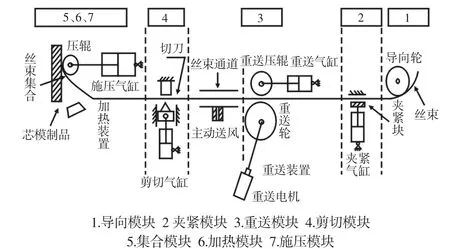
图5 铺放原理流程图Fig.5 Placement Principle Flow Chart
铺放头是整个铺放的核心,所有与丝束铺放相关的动作都是在铺放头中进行的。分析各个模块的作用如下:(1)导向模块:导向模块主体为一个可转动的导向轮,上有丝束槽,将丝束牵引至轨道。(2)夹紧模块:夹紧模块功能同样简单,在需要剪切丝束时,夹紧模块将丝束固定,给剪切模块留出剪切的时间,并防止剪切后的丝束因为张紧力而回收。(3)重送模块:重送模块是输送丝束的模块,主要是利用摩擦轮的摩擦力挤压着丝束,将丝束送至后方。重送模块在正常铺放阶段和重送阶段工作,在剪切阶段停止工作。(4)剪切模块:剪切模块可以把丝束切断,剪切模块装备有切刀,在需要丝束减少时,可以利用剪切模块。(5)集合模块:集合模块将通过丝束通道的丝束最终合并在一起,使它们形成一体,一同进入施压模块。(6)加热模块:铺放头内部的最后一关,加热使丝束上的粘合材料起到作用,是与集合模块协同运作的模块。(7)施压模块:施压模块利用施压气缸的压紧力,使压辊紧密地压在芯模制品上,并让在压辊上的丝束与芯模制品紧紧贴合。

图6 铺放头模块组合简图Fig.6 Paving Head Module Combination Diagram
2.4 芯模部件的结构设计
铺放时,芯模也是非常重要的一环。铺放头最后输出的丝束,是要与芯模的表面紧密结合,因此芯模一定要为系统提供一个自由度,以适应各种铺放情况,其主要结构,如图7所示。

图7 芯模部件的结构Fig.7 The Structure of the Core Mold Part
3 七自由度碳纤维铺放设备有限元及运动分析
3.1 铺放设备关键零部件模态分析
模态分析的结果是振型,结构模态分析是将物体三维模型划分为许多单元离散化,不考虑阻尼系数对系统的影响,得到的自由振动方程如式(3):

假定结构发生简谐振动,也就是{δ}=[φ]cos(wt),由于发生自由振动情况下零部件的节点不会全部是0,因此其自振频率,如式(4)所示。

通过式(5)进而得到结构的m个自振频率

式中:m—结构单元离散节点自由度的多少;
[M]—零部件质量矩阵;
[K]—零部件刚度矩阵。
在工程中,如果不了解结构的固有频率,就有可能引发共振,对设备造成巨大影响。利用Solid Works Simulation对铺放设备的关键部件(龙门架以及连接件)进行模态分析,可获知其振动特性,随后可以根据振动特性分析结构是否需要优化。在进行模态分析前,要对龙门架施加边界条件,固定其安装面,随后再进行分析。分析后结果,如图8所示。不同阶次龙门架固有频率变化,如表1所示。

图8 龙门架模态图Fig.8 Gantry Modal Diagram

表1 不同阶次龙门架固有频率变化Tab.1 Natural Frequency Variation of Gantry With Different Orders
从表1中可以得出,龙门架振动频率稳定,数值较低,不易出现异常情况,可以满足工作要求。
3.2 连接件的模态分析
在进行模态分析前,要对龙门架施加边界条件,固定其安装面,随后再进行分析。分析后结果,如图9所示。同阶次连接件固有频率变化,如表2所示。

图9 连接件模态图Fig.9 Connector Modality Diagram

表2 不同阶次连接件固有频率变化Tab.2 Natural Frequency Changes of Connectors of Different Orders
结合图9和表2中数据可以看出,连接件前四阶频率较低,整体振动较稳定,主要振动方向沿Z轴。连接件结构中的导向部分是振动明显的部分,但导向部分在运动方案中不会承受过大的力,则目前情况不会影响整体稳定性。
3.3 铺放设备关键零部件静力学分析
龙门架是整个设备的底座,起支撑作用,属于铺放设备中比较关键的零件。对龙门架的分析十分重要。利用Solid Works Simulation对龙门架进行静力学分析,要设定相关参数。首先选择材料为普通碳钢,然后按照安装方式,在地脚螺栓的位置设置约束。由于龙门架的作用主要是支撑起其上的运动轴、铺放头等结构,所以龙门架工作时的受力主要是向下的重力。粗略估计龙门架上的其他部件质量在4500N左右,于是在施加载荷时,对龙门架施加5000N载荷。
随后开始划分网格并求解,得出的结果,如图10所示。
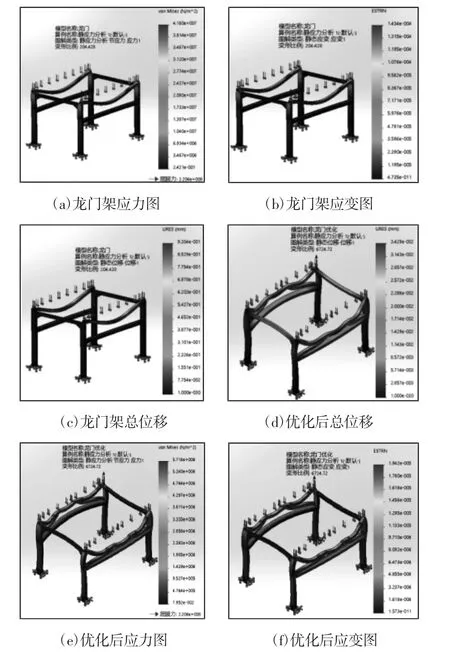
图10 龙门架静力分析Fig.10 Gantry Static Analysis
由图 10(a)和图 10(b)所示,龙门架最大应力为 41.6MPa,最大应变为1.434×10-4,综合考虑焊接性能和力学性能,龙门架材料选用Q235,查机械设计手册得Q235的屈服强度δs=240MPa。
材料许用应力[δ]为:

式中:δs—Q235 屈服点;n—安全系数。
结合实际工况,取n=3。随后代入式(6)求解,得到Q235的许用应力[δ]=80MPa。龙门架的最大应力小于许用应力,证明龙门架的结构满足其工作强度要求。鉴于图10(a)中的位移变化不够均衡,对其结构进行优化,优化后的情况,如图10(b)~图10(c)所示。优化后最大应力为5.716MPa,远小于许用应力,总位移和应变情况也有了一定改善,满足了目前工作要求。
3.4 连接件的静力学分析
同龙门架一样,连接件也属于铺放设备中的关键零部件,连接件主要承担连接Y轴移动部件和Z轴移动部件的作用。按照同样的步骤对连接件进行分析,载荷竖直向下,设定为800N,得出的结果,如图11所示。
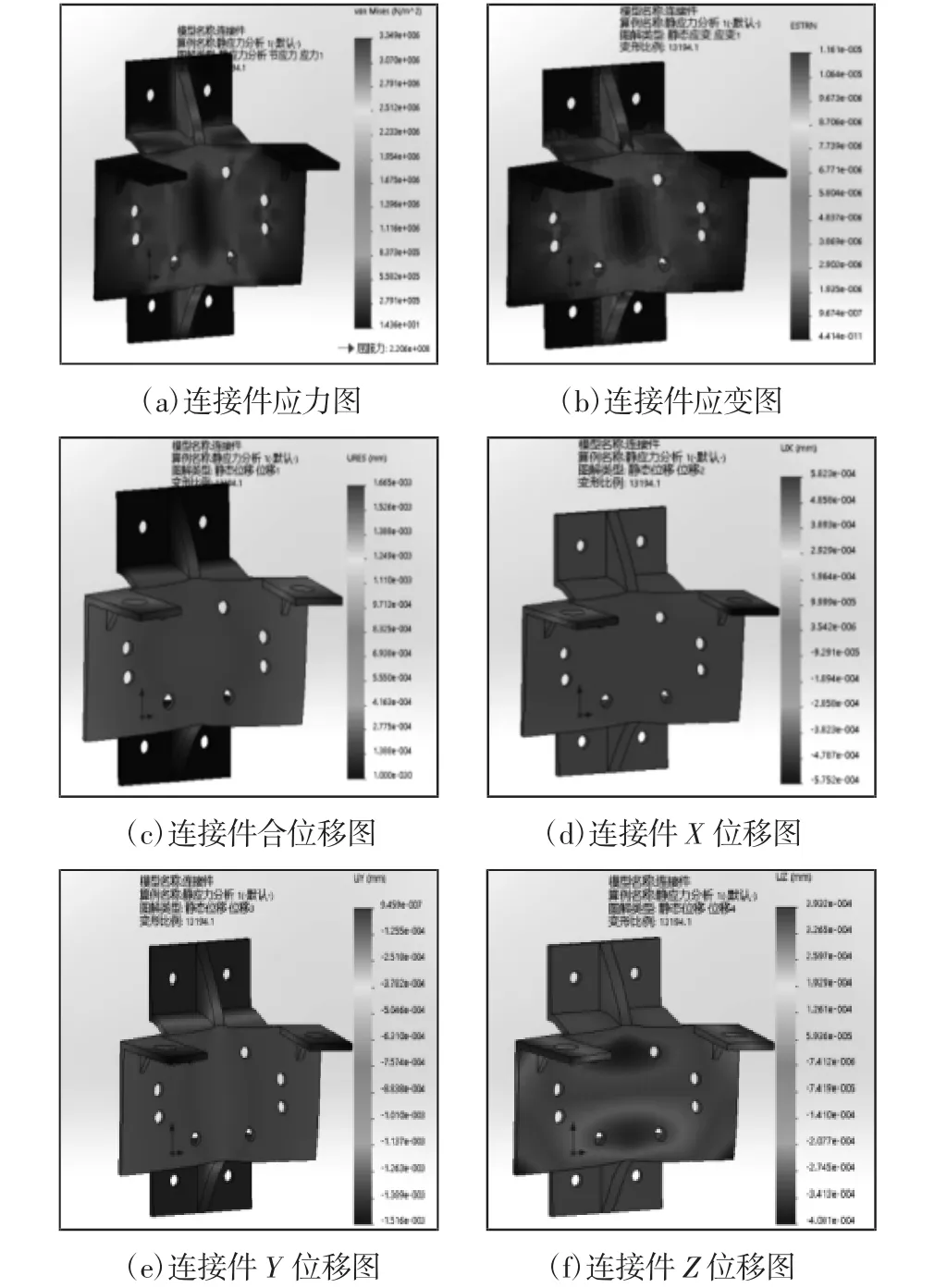
图11 连接件静力分析Fig.11 Connector Static Analysis
由图 11(a)和图 11(b)所示,连接件最大应力为 3.349MPa,最大应变为1.161×10-5,同样考虑焊接性能和力学性能后,选用Q235作为连接件材料。
通过上面已经求得Q235的许用应力[δ]=80MPa,连接件所受最大应力远远小于材料的许用应力。分析图11(c)至图11(f),连接件的合位移以及各方向分位移都合乎正常值,满足工作所需的强度,有一定可靠性。
3.5 铺放设备运动仿真
铺放设备的运动十分复杂,需要借助仿真软件来进行辅助求解。在铺放头运动时的轨迹、位移、速度和加速度等数据,都可以通过仿真软件来得到图解。使用Solid Works中的Motion仿真功能对铺放设备进行仿真,来求解其运动路径、速度、加速度。
在机械臂的直线移动关节上添加直线驱动电机,转动关节处添加旋转电机,随后为电机设置一系列的运动参数,使其能够配合运动。开始铺放时的运动轨迹,如图12所示。
Fig.12铺放运动轨迹Fig.12 Laying Motion Trajectories
这段运动轨迹表示了铺放如何进入工作区间。首先Z轴电机启动,使铺放头贴合芯模制品表面,随后压辊压紧芯模,X轴电机启动,使铺放头水平位移,完成铺放的路径。一段路径铺放完成后,铺放头回归初始位置或设定位置,经过转动关节的旋转调节在运动下一段路径时铺放头的姿态,再启动直线电机,使铺放头进入下一段工作路径。

Fig.13铺放头速度变化幅值图Fig.13 Placement Head Speed Change Amplitude Map
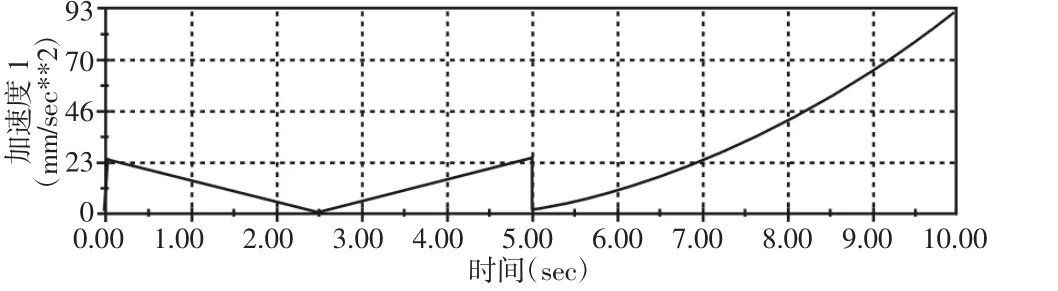
Fig.14铺放头加速度变化幅值图Fig.14 Placement Head Acceleration Change Amplitude Map
可以看出,铺放头在工作中速度稳定,且能快速响应动作。
4 结论
针对大曲面碳纤维铺放需求,设计出一款七自由度碳纤维铺放设备,并分析整个铺放装置后得到如下结论:
(1)将七自由度碳纤维自动铺放设备分为了移动部件、转动部件、辅助部件和芯模部件四个大部分来进行具体结构设计,满足铺放要求。
(2)利用有限元分析软件Solid Works Simulation对七自由度碳纤维自动铺放设备的关键零部件龙门架和连接件进行了静力学分析和模态分析,得出了龙门架和连接件的应力、形变和振动频率等数据,并且对不良部分进行了结构优化,使得结构的设计更加完整。
(3)针对七自由度碳纤维自动铺放设备进行运动学仿真,仿真结果表明表明能够快速反应响应动作,满足设计要求,对大曲率的结构进行铺放具有一定的参考价值。