正弦传动装置的设计与制造
2020-09-10陆贵军祝俊金郭丁昊刘燕
陆贵军 祝俊金 郭丁昊 刘燕
摘要:运用逆向设计思维设计了正弦传动机构,更改原有机构的参数,使用UG12绘制零件图、装配和运动仿真,使用激光切割机进行加工制造。
关键词:正弦机构;UG12;逆向设计;激光切割
对于机械专业本科大学生,大部分时间在学习理论知识,少有机会接触到实际零件生产。书本上很多细节不用实践来理解是十分困难和枯燥的。大学生创新创业计划项目为我们提供了一个动手的机会。本项目研究正弦传动装置的设计与制造。
一、项目背景和意义[1-4]
国内外大量学者对正弦机构系统中间隙、碰撞、振动、磨损等问题进行研究,机构运动时,系统构件之间的运动副中的间隙、摩擦、杆件弹性变形因素对其运动特性影响巨大,间隙除了加大运动误差外,在系统运转过程中,由于运动副反复出现接触与不接触的交替现象,而引起的碰撞冲击,会产生剧烈振动,进而产生噪声和加重运动副之间的磨损。杆件的弹性变形使运动输出误差增大,特别是高精密的机械,可导致失效。对于正弦机构进行试验法,图解法和解析法运动学分析,对正弦机构运动优化设计,运动精度大幅提高。
正弦机构是一种经典的传动机构,在众多农业机械和工程机械行业中的应用广泛,在机械加工、控制、传动等方面,正弦机构发挥重要作用。许多机器应用该机构实现机器的运动转换、动力传递或往复运动。如磨齿机、研磨机、柴油机、开式压力机、加工中心、数控转塔冲床、十字滑块往复式压缩机等,本项目对正弦机构进行研究,掌握和熟悉机构参数设计、制图、仿真及制造、调试、装配过程。
二、设计修改及绘制零件图
正弦机构包括运动部分和驱动部分。其中用于驱动的两个齿轮,齿轮轴上安装有驱动摇杆,底板支撑原为矩形底板四角各设一个小圆柱,经老师指导修改为中间内凹或者钻孔后用螺钉固定四个软垫片。原有方案的不妥之处在于后续底板零件在铣床加工时,如果使用四点支撑,需要在预设厚度的一块平面上铣掉绝大部分材料而只留下四角,这样将会浪費四点之间的材料,同时增加了加工难度和精度,最直接的缺点是增加了加工步骤;而将四点连接起来,相比之下可以减轻以上问题。我们最后采用了中间内凹支撑的方案,相比与攻螺纹孔的方案可以更加简单一些。各零件图采用UG12绘制。
三、装配
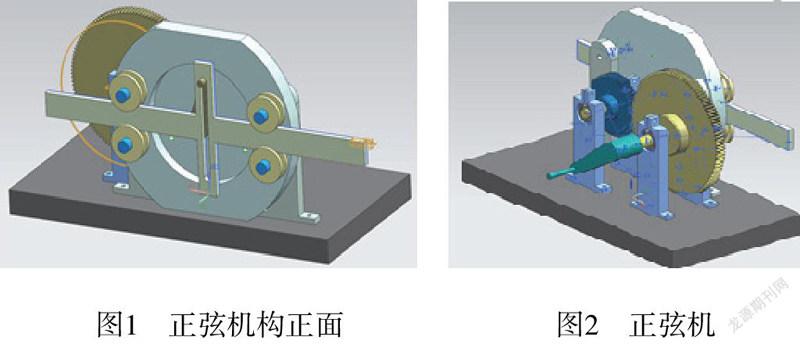
零件装配如图1、图2所示,装配需要标注适合的约束。以运动装置中的十字杆为例。十字杆中的竖杆与驱动连杆间有接触;直接标注了“中心(一对二)”接触,即一个驱动杆轴线始终保持在竖杆槽的两个边的中心。十字杆自身的运动是在空间中沿直线往复,需要分别从三个方向约束十字杆,长度方向:杆始终平行于底板;高度方向:杆始终在底板上固定高度来回移动;宽度方向:杆与四个支撑柱始终接触。这样就确定了杆的运动,完成了对杆的约束。
四、仿真
零件仿真需要标注适合的运动副。除了在课本上常见的滑动副、滚动副。在运动装置部分,十字杆竖杆与驱动杆间使用了“线在线上副”,即驱动杆圆柱线上某线与十字杆竖杆滑槽壁上某线相配合。齿轮之间使用了“齿轮耦合副”;大小齿轮中小齿轮与手摇杆相连,用于驱动;首先标记小齿轮“转动副”与“60r/min”的驱动;然后为大齿轮标记“转动副”;最后在两齿轮之间标记“齿轮耦合副”。
标注约束与运动副本身是一件繁琐与复杂的工作,需要大量时间和精力,十分考验耐心和细心。仿真过程中让我们反复琢磨的点在于,在运动装置中十字连杆与四个支撑柱之间的运动副选择“滑动副”。在这一位置除了“滑动副”,还有一个“3D接触”的运动副可以选择,如果不使用仿真来检验,两者在理论上都是合理的选择。在前期仿真过程中,选择了“3D接触”运动副,导致开始仿真后十字连杆飞离原有位置,仔细研究后做出上述更改解决了这一问题。
五、实物制造
选用5mm亚克力板,以及相应的激光切割制造实物。首先选择合适板厚的亚克力板,放入机器,将激光刀头对齐右上角,导入图纸进行切割;对于需要钻孔的零件多切割一个做备件;切割完毕后需要撕去表面保护膜,用电钻手动钻孔,再进行装配。
考虑到在亚克力板上攻出的螺纹孔容易磨损,如果孔离板边缘过近或者孔与孔之间过近有可能发生崩裂,采用手动钻孔,孔的位置手动测量,可以保证精度,支架顶端孔与零件边缘十分接近,电钻钻头垂直钻入,如果偏斜过大,钻入路径过分靠近边缘,很容易造成崩裂,为了降低加工难度,找到了虎钳固定支架,一定程度上缓解了这一问题。
六、总结
在项目完成的过程中,实际动手参与设计、修改、制造、组装。期间克服了诸多困难,这些困难是课本上难以写明白,老师难以教清楚,只有投身实际制造才能有所体会的。通过本次项目,不但增长了理论学识,而且丰富了实践经验。
参考文献:
[1]机构设计与运动仿真实践教程,周海,电子工业出版社,2018
[2]机构设计及应用图例(第三版),孙开元,张丽杰,化学工业出版社,2018
[3]机械结构优化设计,姚寿文,北京理工大学出版社,2015
[4]正弦机构键合图建模与仿真研究,关文芳,硕士论文,2011
项目:正弦传动运动装置的设计与制造(项目编号:CX2024005);
《基于案例教学的现代制造技术概论》课程建设(项目编号:k202024001)。
(上海工程技术大学)
