亮星辅助下基于坐标转换的快速星图识别方法
2020-09-10刘先一周召发张志利赵军阳段辉
刘先一,周召发,张志利,赵军阳,段辉
火箭军工程大学 导弹工程学院,西安 710025
数字天顶仪作为一种在地面上使用的星敏感器,主要用于测站点高精度的天文定位。国外对数字天顶仪的研究相对较早,主要的研究单位有德国的汉诺威大学和瑞士的苏黎世大学等[1]。目前,国内对数字天顶仪的研究也处于兴起阶段。中国科学院、山东科技大学、西安电子科技大学等单位相继开展了相关研究[2-3]。在采用仪器进行定位解算前,需对仪器拍摄的星图进行识别[4]。目前,常用的星图识别算法主要分为模式识别和子图同构类星图识别算法两大类[5-7]。栅格识别算法作为典型的模式识别算法,受选星的影响较大,星点的选择将会直接影响到栅格算法的识别率[8-9]。三角形星图识别算法是子图同构识别算法的典型算法,具有可靠性高等优点,在工程实践中仍然在广泛使用,但是在识别的过程中需要遍历星点,存在冗余匹配和误匹配,且识别效率较低[10]。近年来,又出现了三角形识别算法的改进算法,如三角形内切圆等算法[11-13],但这些算法并未从根本上克服三角形识别算法的不足,实用性都有待进一步提高[14-15]。
当前,在数字天顶仪定位解算中采用的星图识别算法仍以三角形星图识别算法为主,星图识别所需的时间较长,这直接导致了数字天顶仪的工作效率较低[16-17]。为此,需要对星图识别的正确性和快速性进行研究。这里构建了坐标转换模型,并对星表进行了筛选,拟通过坐标的转换完成星图的识别,提高星图识别的快速性。
1 坐标转换模型的构建
数字天顶仪进行定位时,采用图像传感器进行星图的拍摄。如图1所示,以光轴所处的位置为原点,北向指向为O′N轴,东向指向为O′E轴,建立坐标系O′-NE。理想情况下图像传感器处于水平的状态,以图像传感器的两侧为x0和y0轴建立图像坐标系O-x0y0。由天球的北极P、光轴指向对应的天文坐标(α0,δ0)和恒星(αi,δi)构成球面三角形。
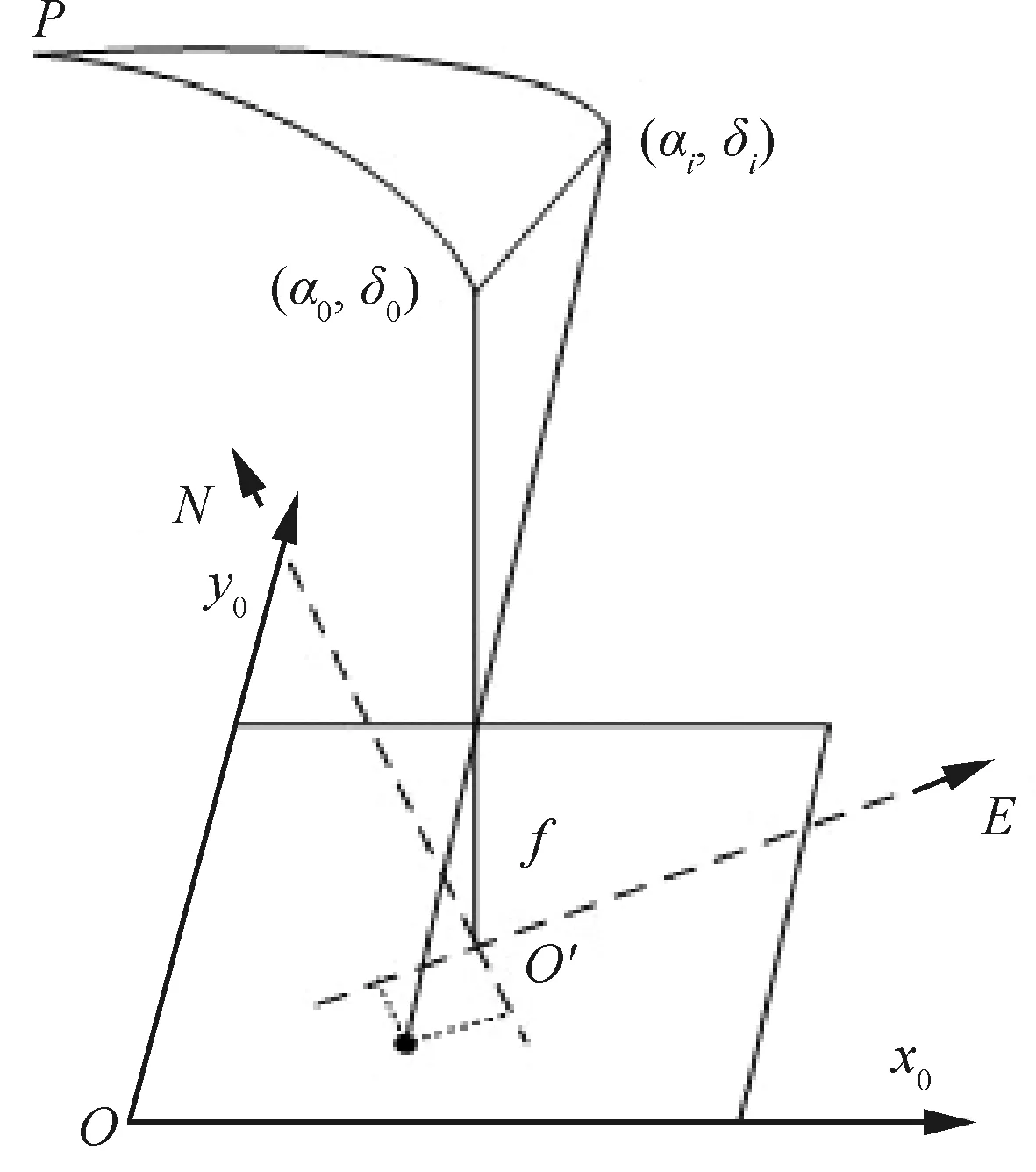
图1 理论像点
可得恒星(αi,δi)在坐标系O′-NE中的理论坐标(xE,yN)为
(1)
式中:f为仪器焦距值。如图1所示,恒星在坐标系O′-NE中的理论坐标(xE,yN)与图像坐标系o-x0y0中的坐标(x0,y0)满足[18]:
(2)
式中:a、b、c1及c2是坐标转换参数。
1.1 恒星理论坐标的分析
从式(1)中可知,在解算恒星理论坐标(xE,yN)时,会受到光轴指向的天文坐标(α0,δ0)和焦距值f的影响。其中,仪器的焦距值f在出厂时已经经过精确的标定。这里主要研究光轴指向对于恒星理论坐标的影响。当光轴指向发生偏差时,恒星在坐标系O′-NE中的坐标值会发生变化,这里将其简化为O′E和O′N两轴的方向进行讨论,如图2所示。

图2 光轴偏差导致的坐标变化
(3)
化简后可得:
ΔxE=fα1
(4)
同理,可得恒星像点在O′N轴方向的偏差值为
ΔyN=fα2
(5)
式中:α2为在O′N平面内光轴的平面夹角。
由以上分析可知,当光轴指向的天文坐标存在误差时,解算的理论坐标误差值只与光轴偏差的夹角有关,可以理解为恒星理论坐标(xE,yN)的整体平移。
1.2 图像坐标的分析
恒星在图像传感器上成像,仪器的倾斜会导致恒星像点图像坐标产生误差;另外,恒星像点的图像坐标会受到光学畸变、大气折射等因素的影响,下面逐一进行分析。
1) 倾斜对图像坐标的影响分析
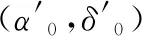
理想状态下,图像传感器处于水平状态,此时恒星像点的图像坐标值为(x0,y0)。但是在实际情况下,数字天顶仪拍摄星图的过程中会存在一定程度的倾斜。仪器的倾角通过双轴倾角传感器进行测量,双轴倾角传感器的安装示意图如图3所示。
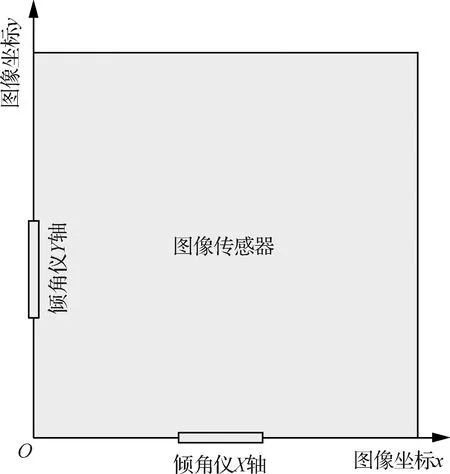
图3 倾角传感器安装
当仪器处于精调平状态时,调平的精度一般在10″以内,倾斜的角度为角秒级的小角度。双轴倾角传感器的测量角度为θ1和θ2,如图4所示。
图4 倾角传感器测量角度

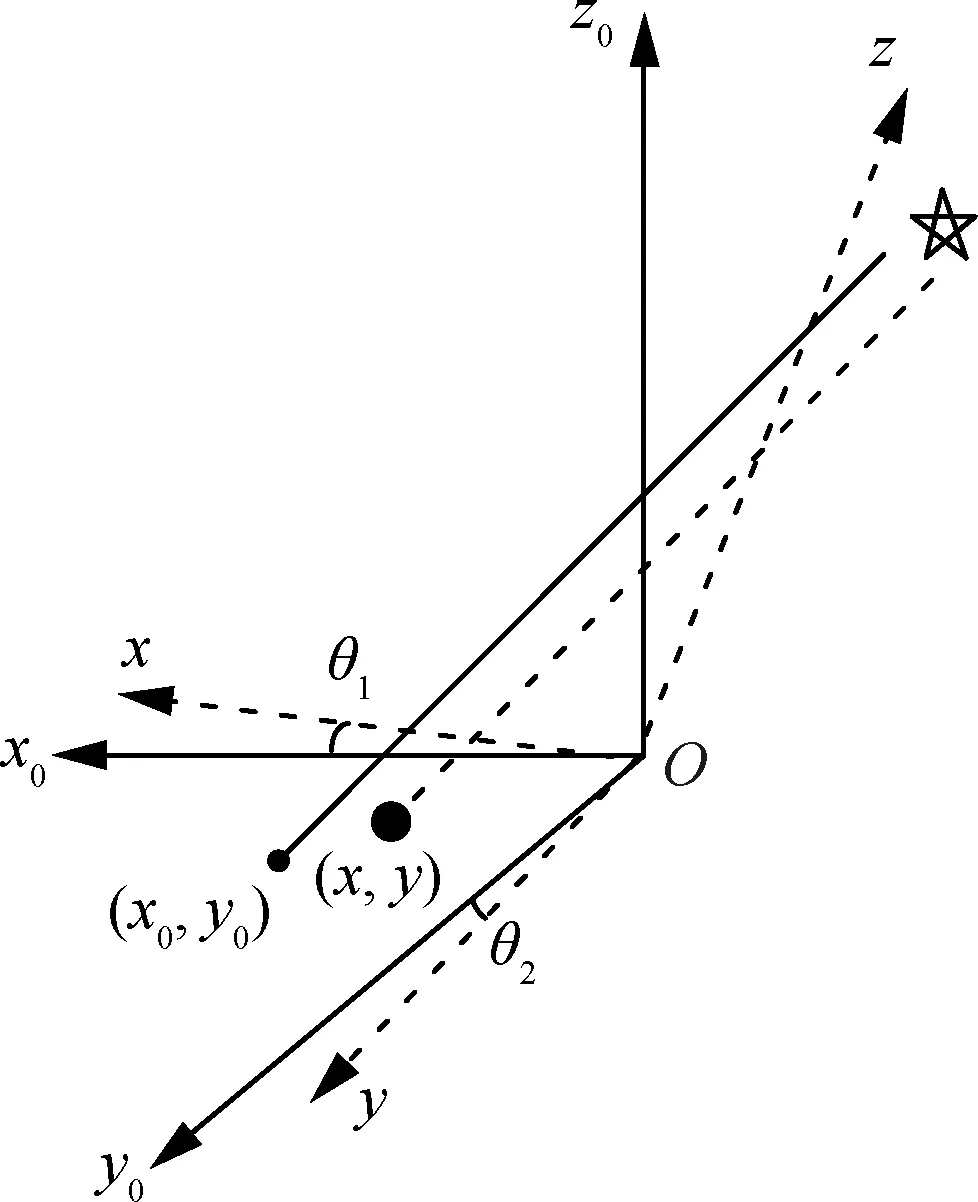
图5 恒星像点的图像坐标

(6)

(7)
由式(7)可得:
(8)
对式(8)进行化简,考虑到θ1和θ2均属于角秒级的小角度,则可得:
(9)
由式(9)可得:当仪器处于小角度倾斜时,实际提取的恒星像点图像坐标(x,y)与理想坐标(x0,y0)之间可通过坐标的整体平移完成。
2) 其他因素对图像坐标的影响分析
恒星星光经过大气层的时候会发生折射。大气折射包含正常大气折射和反常大气折射。正常的大气折射是可以进行补偿的。反常大气折射主要来自镜筒内温度不均匀产生的光线偏转和观测上空的反常折射。在较短时间尺度上,反常大气折射呈现系统误差的特性,可将其视为系统误差进行研究[19]。
在对恒星像点进行提取时,常采用传统质心法、平方加权质心法等方法,存在着星点质心提取误差。恒星像点的提取精度在0.1像素以内[5]。另外,在进行星图拍摄的过程中,存在着噪音和成像畸变等因素,噪音及成像畸变等的存在也会导致恒星像点图像坐标的误差。噪音及成像畸变等带来的星点位置误差在0.3像素以内[20]。
综上分析可知:在小角度情况下,光轴偏差及像面倾斜带来的是像点图像坐标的整体偏移。结合式(2)可知恒星像点的实际图像坐标(x,y)与解算的理论坐标(xE,yN)之间的坐标转换表达式为
(10)
式中:a、b、c′1及c′2为坐标转换参数;c′1=c1+fα1-fθ1+Δx;c′2=c2+fα2-fθ2+Δy。Δx与Δy为星点质心提取、噪音等因素带来的误差,这些误差在2.2节设定识别阈值时予以考虑。
采用数字天顶仪进行定位时,光轴指向的天文坐标的概略位置由GPS给出,因此可解算出恒星像点的理论值,对拍摄的星图进行处理可得到恒星像点的图像坐标。显然,结合式(10)可知,只需要识别出两颗以上的恒星即可对坐标转换系数a、b、c′1及c′2进行求解。
2 亮星辅助下的快速星图识别方法
对于恒星而言,星等越低,恒星越亮,在仪器曝光拍摄星图时,该恒星出现的可能性就越大。这里首先选取出视场范围的恒星,然后根据星等筛选出可用于构成导航星表的亮星。目前,三角形星图识别算法由于其可靠性高等优点,仍然在广泛适用。这里将采用三角形星图识别算法完成3颗亮星的准确识别,并完成坐标转换参数的求解。
2.1 亮星的选取及识别
在进行星图识别时,采用的依巴谷星表中有118 204颗恒星天体的观测数据,这些数据避免了地球大气和重力的干扰,精度较高。为保证对3颗恒星的准确识别,需要选取视场范围内合适星等的恒星构成导航星表。依巴谷星表中的恒星是全球分布的,这里将恒星的分布简化为均匀分布。在数字天顶仪拍摄星图之前,通过安装在仪器上的GPS系统获取测站点的概略位置,将概略位置作为先验信息确定选取的局部星表的视场范围[21]。如图6所示,当视场为θ×θ时,视场范围的导航星数量为n,θ为视场角,R为天球半径。

图6 视场范围的恒星分布
(11)

这里采用三角形星图识别方法对星点进行识别,若由拍摄星点构成的观测三角形与星表中的导航三角形能够匹配,则必须同时满足:
(12)
式中:di′j′、dj′k′和di′k′为所挑选观测三角形的三条边(角距);d(i,j)、d(j,k)和d(i,k)表示导航三角形的三条边(角距);ε为识别阈值。在完成一个三角形的准确识别后,可得到3颗亮星的天球坐标及其对应的图像坐标。
结合GPS给出的光轴指向的天文坐标的概略值,将识别恒星的天文坐标代入式(1),可得每颗恒星对应的理论坐标,再结合每颗恒星对应的图像坐标,由式(10)构建:
(13)
通过式(13)可以解算出坐标转换参数a、b、c′1及c′2。
2.2 快速星图识别方法
快速星图识别流程如图7所示,计算视场范围的恒星对应的理论坐标,结合坐标转换参数a、b、c′1及c′2,可以解算获得每一颗恒星对应的图像坐标(x′i,y′i),将(x′i,y′i)与提取的恒星像点的图像坐标(xi,yi)进行匹配,当恒星能够进行匹配识别时,需要满足:

图7 星图识别流程图
(14)
式中:δ为识别阈值。通过1.2节对星点图像坐标误差的分析可知,由星点提取算法、噪音及光学畸变等因素导致的单颗星点的图像坐标误差在0.4像素以内,另外,综合考虑仪器的状态和经验值选取识别阈值δ为1像素。
显然,该方法首先对3颗亮星进行准确识别,在此基础上构建坐标转换模型,并完成星图的识别,减小了星图识别的计算量,提高了星图识别的快速性。
3 试验数据分析
实验过程中采用的数字天顶仪的视场角为3°×3°,焦距值为600 mm,图像传感器的分辨率为4 096 pixel×4 096 pixel。仪器所能观测到的最大星等为12星等。首先提取出视场范围内的恒星数据,并由亮星数据进行筛选,构建导航星表,部分恒星数据如表1所示。

表1 视场区域内的恒星数据
筛选出亮星后,结合提取出的恒星像点图像坐标,采用三角形星图识别方法对亮星进行识别,识别出3颗亮星即完成对亮星的识别过程,识别的结果如表2所示。

表2 亮星识别结果
通过表2的亮星识别结果,结合式(13),可得坐标转换参数a=0.791 0,b=-0.610 2。结合式(10),解算出表1所示的视场内恒星对应的图像坐标,并与提取的星点图像坐标进行匹配,通过恒星像点图像坐标的匹配即可完成星图的识别,部分识别的数据如表3所示。
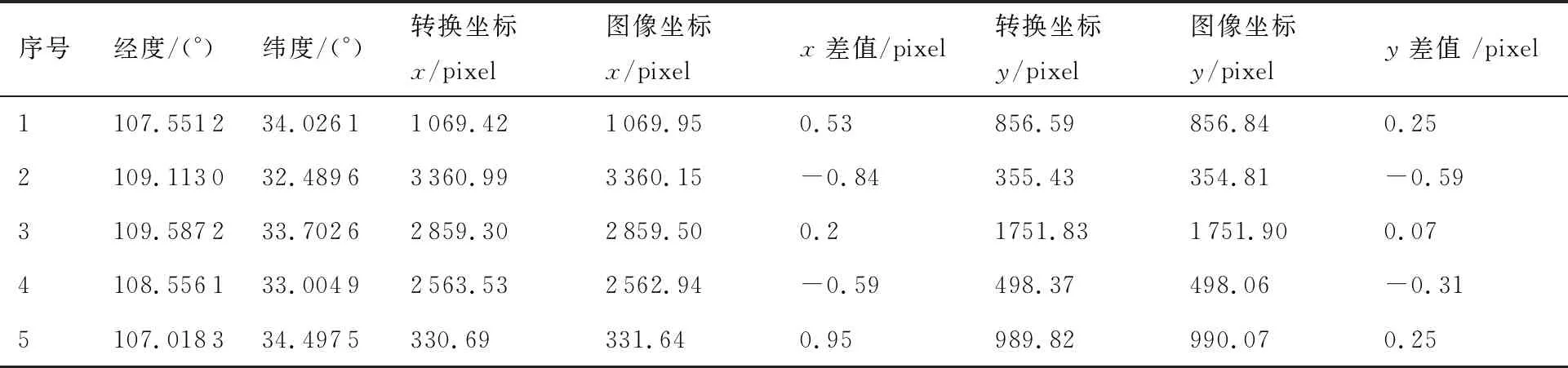
表3 部分识别的恒星数据
从表3中的数据可知:经过坐标转换后得到的坐标与提取的星点图像坐标之间的差值较小,能够完成对恒星的准确识别,也表明了该识别方法的可行性。目前三角形星图识别算法因其可靠性仍然在广泛使用,在三角形星图识别算法上有许多改进,这里分别采用文献[5]中所述的改进三角形星图识别算法与亮星辅助下的坐标转换识别方法对数幅星图进行处理,识别星图所用的时间和识别星点数目如图8所示。
从图8可以看出,相对于改进三角形星图识别算法而言,采用亮星辅助下基于坐标转换的星图识别方法能够快速的完成星图识别,识别星图的时间缩短为原来的五分之一,且两种方法识别的星点数量基本相同,提高了星图识别的速度。
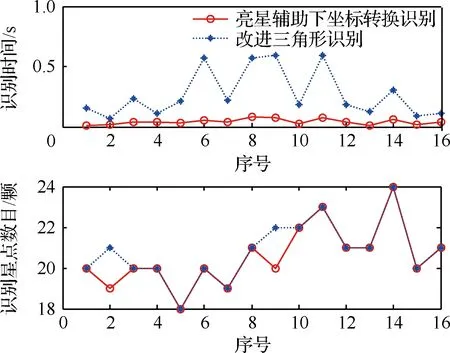
图8 识别时间与星点数量的比较
4 结 论
星图识别方法直接影响着数字天顶仪的工作效率和定位精度,本文构建了坐标转换模型,通过亮星的辅助完成3颗亮星的准确识别,之后通过比对转换坐标与星点图像坐标完成星图的识别,提高了星图识别的快速性。虽然,相对于一些星敏感器而言,数字天顶仪观测的星等范围较大,但是该方法对于探星能力较强的星敏感器而言仍具有一定的借鉴意义,可以简化星图识别的过程,提高星图识别的速度。
