基于高阶干扰观测器的极点配置控制器及应用
2020-09-05王东委
王东委,富 月
(东北大学流程工业综合自动化国家重点实验室,辽宁沈阳 110819)
1 引言
实际工业系统通常具有外部干扰,外部干扰的存在,会给控制系统性能带来不良影响,甚至使控制系统不稳定[1-3].因此,干扰抑制在控制系统设计中一直是一个研究的热点.当干扰可测时,可以采用前馈策略消除干扰的影响.但是,系统所受到的外部干扰往往是不测量的,或是测量的代价太高.通常处理这类问题最直接的一种方法是由可测变量来估计未知干扰,即设计干扰观测器.
干扰观测器技术在20世纪80年代后期首次提出于机器人系统中,在该系统中干扰观测器用于估计外部干扰[4].干扰观测器也可以用来消除系统的不确定性和未建模动态所产生的影响,其中不确定性和未建模动态被看作是干扰的一部分[5].一些已经提出的智能估计方法,能获得很好的干扰观测效果,如文献[6]采用神经网络的方法来对系统的未建模动态进行估计和补偿;文献[7-9]利用模糊逻辑系统来逼近系统的未建模动态;文献[10]采用自适应神经模糊推理系统(adaptive network-based fuzzy inference system,ANFIS)对未建模动态进行估计.上述神经网络或模糊逻辑等智能估计方法虽然能获得较好的干扰估计效果,但考虑到神经网络结构的复杂性、模糊规则的难确定性等问题,这些智能估计方法在实际的工业过程中并未得到广泛应用.
当系统所受外部干扰变化缓慢或者采样周期较小时,文献[11-12]采用前一时刻的干扰来估计当前时刻未知干扰,分别提出了干扰补偿的自适应控制方法和模型预测控制方法;文献[13]提出了一种能同时估计系统未知状态和干扰的比例积分观测器(proportionalintegral observer,PIO),且保证了状态和干扰的观测误差在O(T2)的范围内,其中T为系统的采样周期.但是上述干扰估计方法依赖于系统采样周期的大小,当采样周期较大时,干扰的观测误差将会增大.
文献[14]提出了一种扩展状态观测器,该观测器通过将外部干扰看作是系统的一个扩展状态,实现了对系统的未知状态和外部干扰的同步估计;文献[15]针对一类具有附加干扰的不确定非线性系统,提出了一种对系统信息依赖较小的扩展状态观测器,用来估计系统的扰动,并结合输出反馈控制技术,设计了一种有效抑制扰动的控制方法;文献[16]针对一类具有不匹配不确定性的多输入多输出系统,利用非光滑函数fal构造了一种新的扩展状态观测器,来估计系统的不确定性和状态;文献[17]针对一类不确定非线性系统,结合所提出的扩展状态观测器和自适应滑膜控制方法,设计了自抗扰控制来实现有限时间镇定;文献[18]提出了一种基于全状态反馈的液压伺服系统运动控制的自适应自抗扰控制方案.通过反推方法将自适应控制与扩展状态观测器有效地集成.该控制器的特点是通过构造两个扩展状态观测器来估计匹配不确定性和非匹配不确定性,并由跟踪误差和状态估计误差共同驱动参数自适应律.上述文献所提方法主要是针对连续时间状态空间方程设计的.一方面虽然连续系统经过采样和保持可以转化为离散系统,但是离散过程中若采样周期选择不当会改变系统的特性,从而导致针对连续系统设计的观测器无法通过一定的变换应用于离散系统;另一方面由于这些方法同时观测系统状态和外部干扰,产生的状态观测误差会影响干扰的观测结果.高增益观测器已成为非线性系统状态估计和输出反馈控制中的重要主题,该观测器对模型不确定性和干扰具有鲁棒性,但在反馈回路中实现时对测量噪声较敏感[19].
综合考虑以上几方面存在的问题,本文针对一类具有外部干扰的离散时间线性输入-输出模型,提出了一种基于输出误差的高阶干扰观测器,当观测器阶次足够高时,观测误差渐近收敛;同时基于该高阶干扰观测器,提出了一种新的极点配置控制方法.该方法通过常规极点配置控制器保证了闭环系统的稳定,而高阶干扰观测器用来消除外部干扰对闭环系统的影响.将所提出的方法与基于前一拍干扰补偿的极点配置控制方法和传统的PID方法进行了仿真对比,结果表明了所提方法的有效性和优越性.将所提出的控制方法应用到单容水箱液位控制系统中,实验结果进一步验证了所提方法的有效性和可实施性.
2 问题描述
考虑如下带有一步时延的单输入单输出确定性离散时间非线性系统:

其中:y(k)∈ℝ和u(k)∈ℝ分别为系统在k时刻的输出变量和输入变量;na和nb为系统的阶次;f[·]:ℝna×ℝnb+1→ℝ为光滑的非线性函数;d(k)∈ℝ为未知的外部干扰.不失一般性,假设原点(0,0)为式(1)的平衡点.
将f[·]在原点(0,0)处按泰勒公式展开,并令f[·]在原点处的一阶泰勒系数分别为

其中z-1为单位后移算子,于是根据式(1)得到系统在平衡点附近的局部线性化模型

本文的目标为针对具有未知干扰的线性化模型式(2),设计具有高阶干扰观测器的极点配置控制器,消除未知干扰对闭环系统的影响,使系统的输出能稳定地跟踪给定的参考输入.
3 基于高阶干扰观测器的极点配置控制器
3.1 外部干扰已知时的极点配置控制器
当外部干扰d(k)已知时,在极点配置控制器方程中引入干扰补偿项,以消除外部干扰对系统输出的影响,此时控制系统结构如图1所示.

图1 干扰已知时带干扰补偿的控制系统结构框图Fig.1 Structure diagram of control system with disturbance compensation under knowing disturbance
由图1可知,基于干扰补偿的极点配置控制器为

其中:w(k)为有界的参考输入,E(z-1),G(z-1),H(z-1)和K(z-1)为关于z-1的多项式.
将式(3)两边同乘以B(z-1)并利用式(2)得到闭环系统输出方程

设理想的闭环特征多项式为T(z-1),则有

式(5)为丢番图方程,其中多项式A(z-1),B(z-1)和T(z-1)已 知,多项式H(z-1),G(z-1)未 知.当H(z-1),G(z-1)和T(z-1)的阶次nH,nG和nT分别满足

时,H(z-1)和G(z-1)存在且唯一.
由式(4)和式(5)可知,为使系统输出能稳定跟踪参考输入,多项式E(z-1),K(z-1)须满足

3.2 外部干扰未知时的极点配置控制器
当系统的外部干扰d(k)未知时,控制器方程式(3)无法实现,此时应对系统的外部干扰d(k)进行估计.本文设计了一种高阶干扰观测器,通过该干扰观测器可以实现对外部干扰的有效估计.
3.2.1 高阶干扰观测器设计
对于输出可测,干扰未知的系统,设计如下的高阶干扰观测器:

为证明上述高阶干扰观测器的观测误差充分小,首先给出关于干扰d(k)的假设.
假设1干扰d(k)有界,且任意k时刻干扰的变化率满足Δd(k)<1.
定理1如果假设1成立,并且存在常值Lj∈ℝ,j=0,1,2,···,N使得对任意的|z|>1,不等式

成立,则对任意小的正数ε >0,存在正整数N0,当N >N0时,干扰估计误差满足
证对任意的干扰d(k+1),可以将其扩展成如下形式:

令干扰估计误差和输出估计误差分别为

由式(2)与式(9),可知

将式(13)与式(8)相减,并将式(11)-(12)和式(15)代入可得

将式(16)代入式(17),可得出

由假设1 可知,对任意小的正数ε >0,存在正整 数N0,当N >N0时,|ΔN+1d(k)|<ε 成 立,即,再由式(10)可知,干扰的估计误差q(k)满足

证毕.
注1高阶观测器中的“高阶”是针对所设计的观测器而言的.阶次的高低,对应式(8)中N的大小,当N足够大时,干扰观测误差趋向于零.
3.2.2 基于高阶干扰观测器的控制器
通过所设计的高阶干扰观测器对系统的未知外部干扰d(k)进行估计,结合极点配置方法,提出了基于高阶干扰观测器的极点配置控制方法,控制系统结构如图2所示.

图2 干扰未知时带干扰补偿的控制系统结构框图Fig.2 Structure diagram of control system with disturbance compensation under unknowing disturbance
由图2可知,基于高阶干扰观测器的极点配置控制器方程为

由以上所设计的控制器,并结合假设1和定理1,可以得出如下定理2:
定理2如果假设1 成立,并且闭环特征多项式T(z-1)稳定,同时多项式H(z-1)和G(z-1)满足式(5),E(z-1)和K(z-1)分别满足式(6)和式(7),则当控制器式(19)作用于被控对象式(2)时,闭环系统的输入、输出信号一致有界,且闭环系统的输出能稳定跟踪阶跃参考输入,稳态跟踪误差为零.
证由式(2)(5)和式(19)可知,闭环系统输入、输出方程可化为

根据式(14),式(19)和式(20)可进一步化为

由于参考输入w(k)和干扰d(k)有界,由文献[20]中的关键技术引理可知
其中C1,C2,C3,C4为大于零的常数.
由定理1 可知,干扰估计误差q(k)有界,故式(24)和式(25)满足

其中M2≥0为q(k)的上界.因此当控制器式(19)作用于被控对象式(2)时,闭环系统的输入、输出信号一致有界.
当系统达到稳态时,式(23)可化为

由式(6)和式(7)可得

3.3 仿真实验
为了验证所提出控制方法的有效性和优越性,针对如下离散时间被控对象模型进行仿真实验:

为求出基于干扰补偿的极点配置控制器方程中的未知多项式,引入理想闭环特征多项式

将式(26)-(27)和式(28)代入式(5),求得多项式

又根据定理2,选择

同时令系统的参考输入信号为

以下分别为基于前一拍干扰补偿和基于高阶干扰观测器的极点配置控制方法,以及传统的PID控制方法所得到的仿真结果:
1)基于前一拍干扰补偿的极点配置控制方法.
采用基于前一拍干扰补偿的极点配置控制方法[11]进行仿真实验.初始值选为

仿真结果如图3所示.
图3(a)-(c)分别为系统输出曲线、控制输入曲线以及干扰估计曲线.从图3(a)和图3(b)可以看出,闭环系统控制输入和输出信号有界,但是输出y和参考输入w之间存在较大的跟踪误差.从图3(c)可以看出,干扰估计与实际干扰d之间存在较大的估计误差.

图3 基于前一拍干扰补偿的极点配置控制方法的仿真结果Fig.3 Simulation results of pole assignment control method based on previous beat disturbance compensation
2)基于高阶干扰观测器的极点配置控制方法.
采用本文提出的基于高阶干扰观测器的极点配置控制方法进行仿真实验.选取高阶干扰观测器的阶次N=2,根据式(10)可以得到高阶干扰观测器增益分别为

初始值选为
为了证明采用本文所提出的基于高阶干扰观测器的极点配置控制方法和采用干扰已知时的极点配置控制方法时能得到相似的输入和输出效果,在仿真中将两种极点配置控制方法所得输入和输出分别进行了比较,仿真结果如图4所示.
图4(a)-(b)分别为两种控制方法下闭环系统的输出和控制输入曲线,其中:u,y分别为采用本文所提控制方法得到的系统输入和输出,ur,yr分别为采用干扰已知的极点配置控制方法所得到的系统输入和输出.图4(c)为干扰的估计曲线.从图4(a)和图4(b)可以看出,两种控制方法下,闭环系统的输入和输出信号都有界,系统控制输入和输出的轨迹几乎一致,且系统输出y和yr均能稳定跟踪参考输入w.从图4(c)可以看出,干扰估计与实际干扰d之间,除在初始阶段存在估计误差外,之后的估计误差几乎为零.

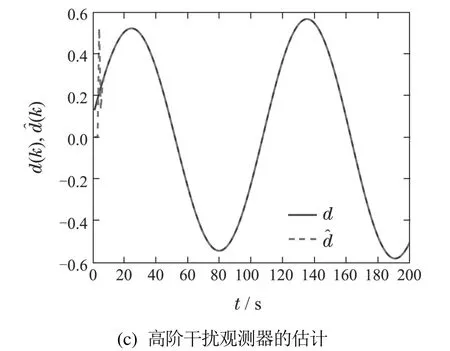
图4 基于高阶干扰观测器的极点配置控制方法的仿真结果Fig.4 Simulation results of pole assignment control method based on higher order disturbance observer
3)传统的PID控制方法.
采用文献[21]中的PID控制方法进行仿真实验.选择初始值

选择式(28)所给多项式为理想闭环特征多项式,通过极点配置得到滤波器Hf(z-1)和PID控制器的参数分别为

仿真结果如图5所示.
图5(a)-(c)分别为闭环系统输出跟踪曲线、控制输入曲线以及干扰曲线.从图5(a)和图5(b)可以看出,闭环系统输入和输出信号有界,但是输出y和参考输入w之间同样存在较大的跟踪误差,同时从图5(a)可以看出,输出阶跃响应存在很大的超调.

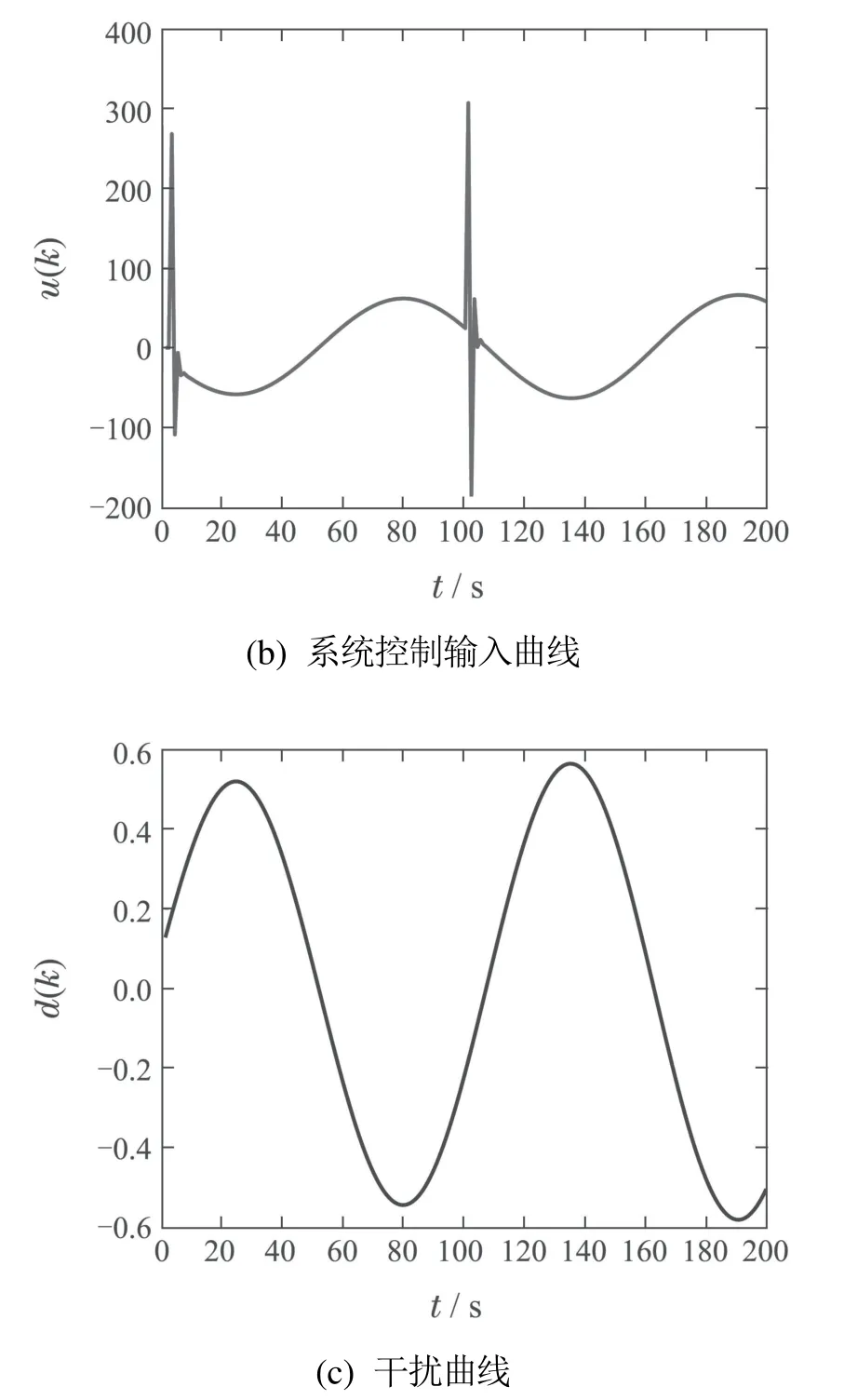
图5 传统的PID控制方法所得仿真结果Fig.5 Simulation results obtained by traditional PID controller
综上所述,通过对比图3、图4和图5三种控制方法下所得到的仿真结果可以看出,采用本文所提出的控制方法,系统的输出y几乎能稳定地跟踪参考输入w,所得控制效果比采用基于前一拍干扰补偿的极点配置控制方法和采用传统的PID控制方法所得到的控制效果都要好.虽然相较于PID控制方法,本文所提出的控制方法引入了高阶观测器,控制结构变的复杂,但是系统的控制效果得到大幅改善.
4 单容水箱液位控制实验
为进一步验证本文所提控制方法的有效性及其在实际物理过程中的可实施性,将其应用到单容水箱液位系统.
4.1 单容水箱液位控制系统描述
如图6所示,单容水箱液位系统由1个水泵、1个流量计、1个液位传感器、1个泄水阀、1个水箱和1个控制器组成.该系统为单输入单输出系统,输入u为水泵的脉冲(pulse width modulation,PWM)占空比,输出y为水箱的液位高度.通过调节水泵的PWM占空比能够改变水箱进水流量q1,进而改变水箱的液位高度,水箱液位高度由液位传感器检测得到,并将检测结果反馈给控制器.
实验开始时给控制器一个液位设定值w,由于液位传感器的反馈信号为0,水箱液位与设定液位的偏差为w,在控制器输出信号u的作用下,水泵转动,从蓄水池内抽水送入水箱,水箱液位上升,液位传感器反馈信号增大,液位偏差逐渐减小,控制器输出量减小,液位上升速度减慢,直到液位达到并稳定在设定液位高度w.
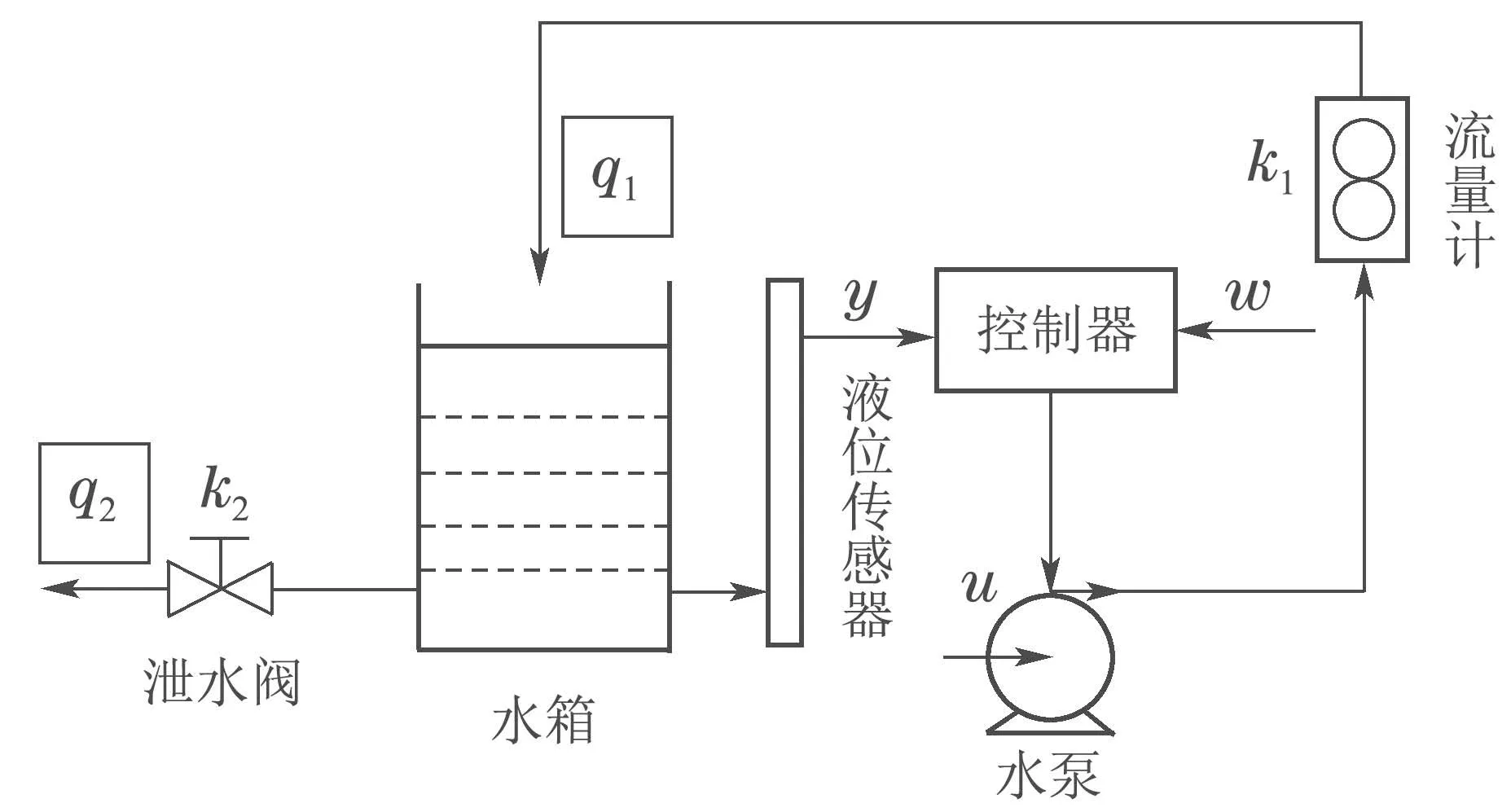
图6 单容水箱液位控制系统工艺过程原理图Fig.6 Process schematic diagram of single-tank level control system
4.2 单容水箱液位控制系统的控制器设计模型
由物料平衡关系可知,单容水箱进水流量、出水流量与水箱内液位高度的关系如下:
从而得单容水箱液位系统的机理模型:

该机理模型是非线性的,不适合直接作为控制器设计模型直接使用.将式(29)在其工作点(y0,u0)附近利用泰勒公式展开,得到在其工作点附近的局部线性化模型

二者均为常数,q1,q2,A1,y,k1,y0,k2,u和u0的含义如表1所示.
由于液位传感器所采集的液位数据中含有高频噪声,为消除高频噪声的影响,在液位传感器之后增加了低通滤波器,此时单容水箱液位系统在工作点附近的线性化模型可表示为

其中K2和T2分别为滤波器的增益和时间常数,此时单容水箱液位系统近似为二阶线性模型.取采样周期Ts=1 s,对式(31)离散化,并考虑液位控制过程中的滞后特性,得到单容水箱液位控制系统的离散时间线性模型

其中A(z-1)和B(z-1)分别为关于z-1的二阶多项式和一阶多项式.

表1 单容水箱液位系统机理模型中涉及的符号含义Table 1 Symbolic meaning involved in mechanism model of liquid level system in single tank
定义数据向量φ(k-1)和参数向量θ分别为

则由式(32)可知,系统输出可表示为

选择u(k)=10 sin(0.01k)+50作为输入激励被控对象,通过采样获得单容水箱液位系统的500组输入输出数据.利用该数据,采用如下递推最小二乘算法,对模型参数进行辨识:


故式(32)中

由于辨识所得系统模型与真实系统模型存在着偏差,可将偏差视为系统的未建模动态.因此,在式(32)中加入d(k)来表示模型的偏差,从而得到形如式(2)的单容水箱液位系统控制器设计模型.
4.3 单容水箱液位控制系统的仿真实验
以单容水箱液位控制系统为被控对象,采用本文提出的基于高阶观测器的极点配置控制方法进行仿真实验,令干扰

为求出基于高阶干扰观测器的极点配置控制器中的未知多项式,选取闭环极点为

故引入理想闭环特征多项式

又根据定理2,选择

令参考输入信号为
干扰估计和输入输出初始值取

干扰观测器的阶次N=2,参数

仿真结果如图7所示.
从图7可以看出,系统输出能稳定地跟踪参考输入,稳态时系统的输出误差为零,且系统的控制输入也相对较小.

图7 基于高阶干扰观测器的极点配置控制方法在水箱液位控制系统中的仿真结果Fig.7 Simulation effects of pole assignment control method based on higher order disturbance observer in water tank level control system
4.4 液位控制实验
本文针对单容水箱液位控制系统实验平台进行实验.该平台由上位机监控软件、嵌入式控制器和如图8所示的单容水箱液位系统3部分组成.监控软件主要包括两部分:MATLAB中的Simulink软件包和EasyControl系列实验软件.监控软件安装在PC机中,PC机与控制器采用以太网进行连接,控制器和水箱液位系统通过数据总线进行通讯.PC 机中的MATLAB/Simulink软件与嵌入式控制器之间具有无缝接口,可以在PC机中MATLAB软件的Simulink工具包完成控制算法模块的搭建,生成.mdl格式文件,再通过EasyControl 软件编译生成控制器可读的.dlm格式文件,将编译所得文件下载到硬件控制器中,实时运行控制系统.
本实验的控制目标是使系统输出(二号水箱的液位)能稳定地跟踪参考输入(即参考液位).
具体实验步骤为:首先根据提出的控制方法和相关的控制参数,由Simulink软件构建闭环控制系统模块,并通过EasyControl软件进行编译,生成嵌入式控制器可执行的文件;其次在EasyControl软件中设定监控界面的采用周期,开始液位控制实验,实验开始时,液位设定值为4 cm,达到稳定后在200 s时将液位设定值调至6 cm;最后待达到400 s时,停止实验.
为验证所提控制方法的优越性,首先采用第3.3节所述的PID控制方法进行液位控制实验.

图8 单容水箱液位系统实验平台Fig.8 Experimental platform of single-tank liquid level system
4.4.1 PID控制实验
理想闭环特征多项式同式(33)所示,通过极点配置得到滤波器Hf(z-1)和PID控制器的参数分别为


选择初始值为

所得实验结果如图9和图10所示.
从图9可以看出,PID控制器能使水箱液位在稳态时跟踪参考液位,但系统的阶跃响应存在较大的超调量,调节时间较长,动态性能较差.从图10可以看出,阶跃发生时,控制输入(水泵PWM占空比)幅值较大.
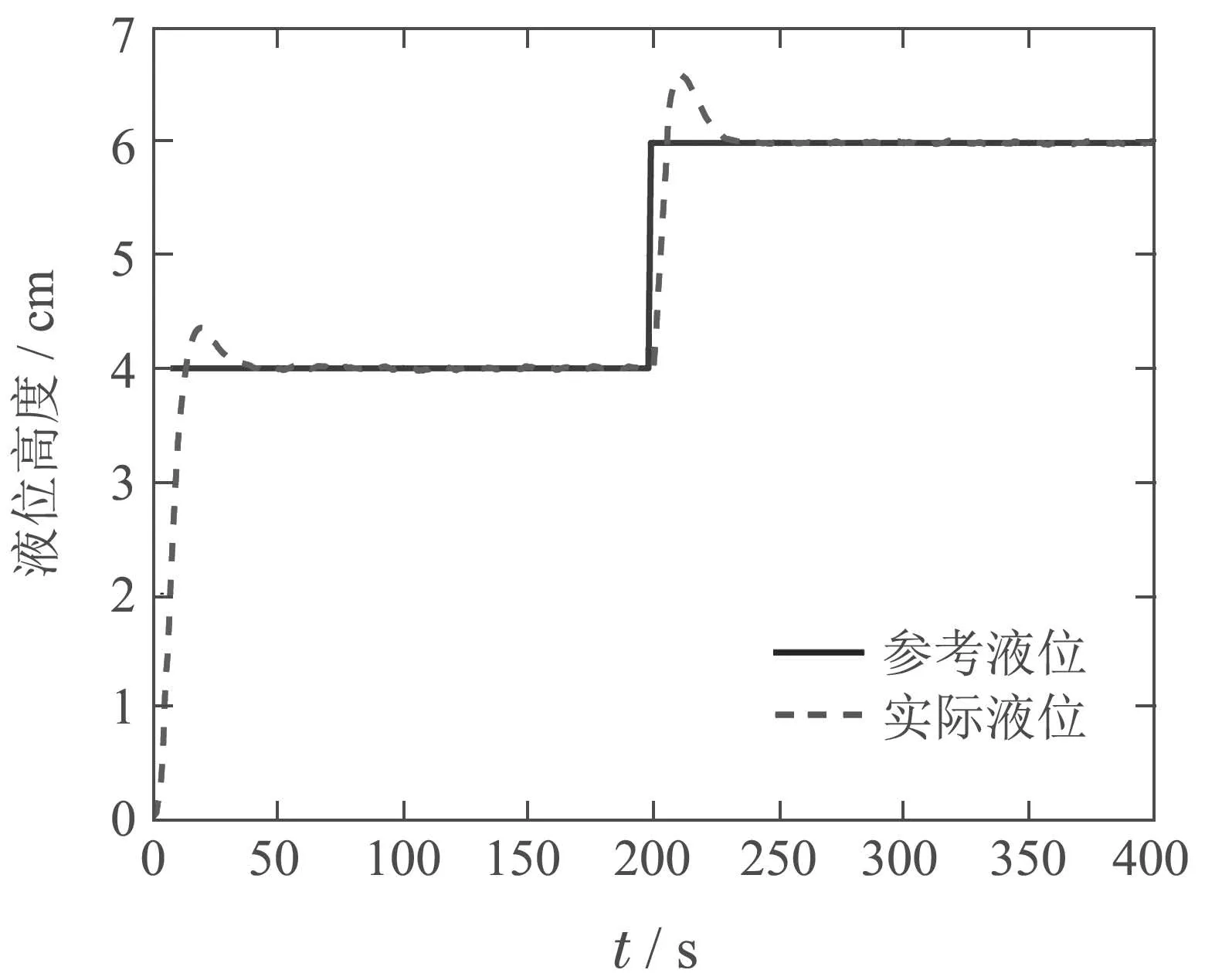
图9 采用PID控制器所得液位响应曲线Fig.9 Liquid level response curve obtained by PID controller

图10 采用PID控制器所得水泵的PWM占空比Fig.10 PWM duty cycle obtained by PID controller
4.4.2 基于高阶干扰观测器的极点配置实验
采用所提出的基于高阶干扰观测器的极点配置控制方法进行水箱液位控制实验,控制器参数同第4.3节所述,所得的实验结果如图11-13所示.
从图11可以看出,系统输出(实际液位)能较快地稳定在参考液位,且无超调现象的发生,与PID控制方法相比,系统的动态性能得到了改善.从图10、图12的实验结果对比可以看出,在阶跃发生时,采用本文所设计的控制器所得水泵PWM占空比的幅值减小.从图13可以看出,系统的未建模动态近似为常值.

图11 采用所提控制器得到的液位响应曲线Fig.11 Liquid level response curve obtained by the proposed controller

图12 采用所提控制器得到的水泵PWM占空比Fig.12 PWM duty cycle obtained by the proposed controller

图13 干扰观测器对未建模动态的估计结果Fig.13 Estimation of unmodeled dynamics by disturbance observer
由于系统未建模动态近似为常值,而PID控制器中存在着积分单元,其能消除系统输出的稳态误差,因此PID控制器能使得系统输出稳定地跟踪参考输入.与PID控制方法相比,本文所提出的控制方法改善了系统的动态性能.
5 结论
本文针对具有外部未知干扰的线性系统,通过设计一种高阶干扰观测器,实现了对外部干扰的估计.将所设计高阶干扰观测器与常规极点配置控制方法相结合,设计了一种基于高阶干扰观测器的极点配置控制器,实现了对系统的稳定控制.仿真和物理实验结果均表明本文所提出的控制方法能够有效地实现对干扰的抑制和对参考输入的稳态跟踪.由于单容水箱液位控制系统模型相对简单,下一步将采用较复杂的系统进行物理实验,验证所设计控制方法的性能.
