分布式模糊离散事件系统的故障预测
2020-09-05谢仁可刘富春崔洪刚
谢仁可 ,刘富春† ,赵 锐,崔洪刚,2
(1.广东工业大学计算机学院,广东广州 510006;2.广东省东源县科技创新中心,广东河源 517500)
1 引言
故障诊断是离散事件系统研究中备受关注的研究课题之一.早在1995年,Sampath等人提出的基于事件的故障诊断方法将系统的可诊断性定义为系统能够在有限时延内对所发生的故障事件进行诊断[1].Yoo和Lafortune等人提出了一种多项式复杂度的验证器算法,能够更快捷的判断离散事件系统的可诊断性[2].在文献[3-5]中还有更多基于离散事件系统的故障诊断研究.上述故障诊断方法都是针对经典系统.事实上,针对模糊离散事件系统的故障诊断也有不少相关研究.文献[6]在模糊离散事件系统的基础上,提出了一种模糊故障诊断的算法,文献[7]又给出了模糊离散事件系统故障诊断的一种基于验证器的故障诊断算法.
值得指出的是,故障诊断虽然可以在系统发生故障之后将其诊断出来,然而某些重大故障的发生往往会造成不可挽回的损失.因此,关于故障预测的研究近年来越来越引起国内外学者关注.Cao首次提出离散事件系统的可预测性[8],此后,Genc和Lafortune较为系统地给出了可预测性定义及其诊断器和验证器算法[9].文献[10]又将离散事件系统的故障预测推广至分布式框架.最近,Benmessahel等人将模糊离散事件系统的故障诊断推广到了故障预测[11].作者在文献[12-13]中也对分布式离散事件系统的可预测性进行了研究.
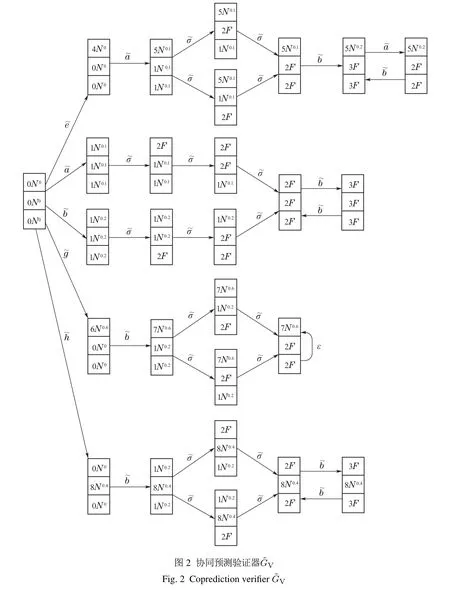
本文将文献[11-13]中的故障预测方法推广到分布式模糊离散事件系统模型上,研究多个站点监测下的系统的λ-协同可预测性.先提出一种分布式模糊离散事件系统的λ-协同可预测性的形式化方法,使分布式模糊系统的协同可预测度不小于各分站点的局部可预测度.然后通过构造协同预测验证器,提出一种基于协同预测验证器的协同预测算法,并得到一个关于分布式模糊离散事件系统λ-协同可预测性的充分必要条件.
2 分布式模糊离散事件系统的协同可预测性

3 协同预测验证器的构建

4 协同预测验证器的充分必要条件及协同预测算法

5 总结
本文将模糊离散事件系统的故障预测方法推广至分布式系统.通过多个站点协同预测的方式,计算系统的λ-协同可预测性,运用协同预测的方式得到的λ-协同可预测性将不小于单个站点下系统的λ-可预测性,更准确地描述了分布式模糊离散事件系统的协同可预测性.后续的研究中,本文会考虑用Petri网构建协同预测验证器.
