QC-LDPC码最小环路检测算法
2020-09-04薛宇丛
薛宇丛,周 华,铁 鑫
(南京信息工程大学 电子与信息工程学院,江苏 南京 210044)
0 引 言
自从信道编码理论被提出以来,人们就在寻找一种在性能上能够无限接近香农极限的编码。早期的BCH码、Turbo码尽管具有结构规整、复杂度较低等优点,但是满足不了在高信噪比时低误码率的要求,LDPC码的出现则使信道编码的发展有了新的突破。LDPC(low-density parity-check)码由Gallager提出[1],它因性能逼近香农极限而成为近年来的研究热点,并且被应用到DVB2、4G、5G等标准中。
LDPC码性能的优越性源于其校验矩阵的结构,校验矩阵常用Tanner图表示。Tanner图是一种双向图,当LDPC码校验矩阵对应的双向图存在环路时,从某一节点发出的信息经过环路的传递,会回到自身,破坏了置信传播中边信息的独立性[2]。所以在LDPC码的构造上,应该尽量减小环路对于译码性能的影响,避免短环结构出现[3]。对于码长较小的LDPC码,长度为4的最小环路可以由校验矩阵直观地观察到,对于环路长度大于4的环,就需要用相关的算法检测。本文提出了一种计算QC-LDPC码最小环路围长的方法,基于这种方法,构造最小环路为4、6、8的QC-LDPC码的校验矩阵,并通过仿真比较在相同信噪比情况下,最小围长不同的QC-LDPC码的误码率和误帧率。
1 LDPC码
二进制LDPC码是一种线性分组码,并由稀疏奇偶校验矩阵定义。稀疏指奇偶校验矩阵中“1”的数量相对“0”较少。若各行(列)中包含的“1”的个数相同,则称为规则LDPC码,否则称为非规则LDPC码[4]。如式(1)所示,以规则LDPC码为例给出了对应的校验矩阵H,其中行重为3,列重为2
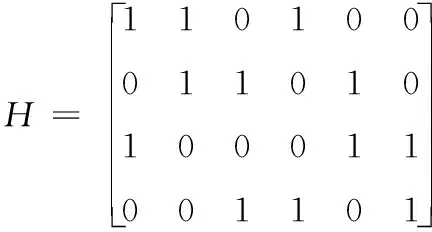
(1)
LDPC码的常用表示方法,除了矩阵形式,还有Tanner图形式。Tanner图是一种双向图,且与校验矩阵相对应[5],图1表示式(1)所给的校验矩阵H对应的Tanner图。校验矩阵中的行对应Tanner图中的校验节点(check node),记为Ci,用方形来表示;列对应Tanner图中的变量节点(bit node),记为Vj,用圆形来表示。Tanner图中的连接特性由校验矩阵表示,若某行某列的位置上是“1”,则表示对应的校验节点与变量节点之间存在一条边相连[6]。由变量节点、边和校验节点首尾相连组成的闭合回路称为环路。构成环路的边的总数称为围长(最小围长称为girth),且围长是一个大于等于4的偶数。
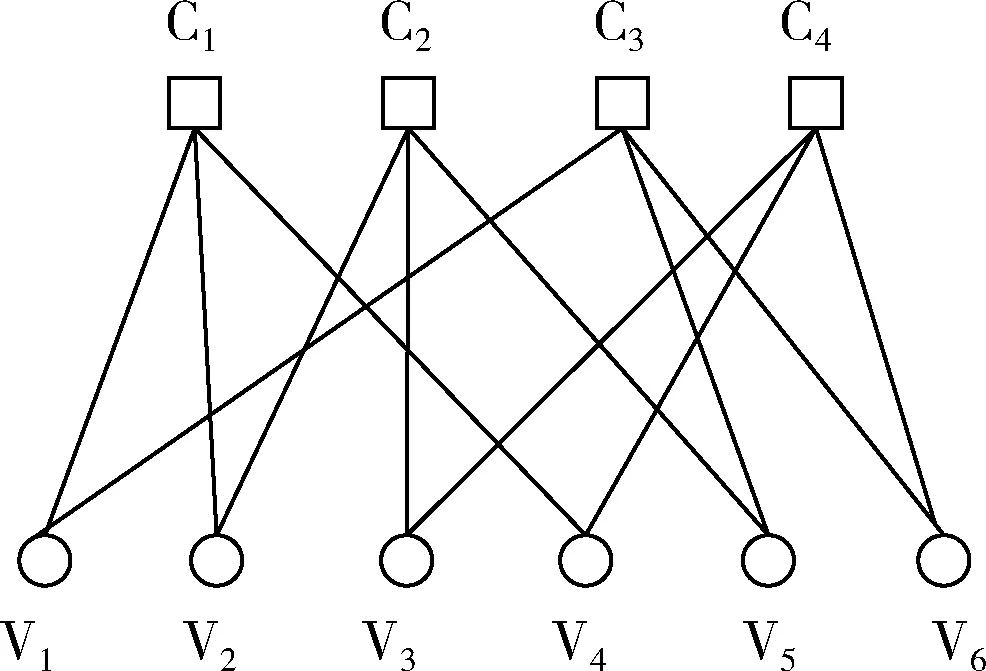
图1 校验矩阵H的Tanner图表示
图1中C1→V1→C3→V5→C2→V2→C1就构成了完整的环路,其中路径长度为6。
2 基于循环置换矩阵的QC-LDPC码
LDPC码可以分为两大类:随机LDPC码和QC-LDPC码[7]。在随机LDPC码的校验矩阵中,“1”的分布没有规律,存储时需记录生成矩阵和校验矩阵的所有行向量,在实现上比较困难[8]。准循环低密度奇偶校验(quasi-cyclic low-density parity-check,QC-LDPC)码是一种高度结构化的LDPC码,可以由指数矩阵和扩展维数来表示得到的码字结构,其自身的准循环特性使编码和解码的过程更加高效。由单位矩阵经过循环移位后的循环置换矩阵组成QC-LDPC码的校验矩阵H,矩阵H形式为
(2)
其中,I(pn,l)表示将一个大小为M×M的单位矩阵向左循环移pn,l位,1≤n≤N,1≤l≤L。每个循环置换矩阵都由其维数M和循环移位次数pn,l唯一确定,因此QC-LDPC码的H矩阵比较容易在硬件中实现,且方便寻址储存。
3 QC-LDPC码最小环路检测算法
本文以式(1)中的矩阵H为例,提出一种检测QC-LDPC码中最小环路围长的方法。本算法借鉴了比特翻转(bit-flipping,BF)译码算法的思想。比特翻转译码算法是用于LDPC码的硬判决消息传递算法,首先对输入译码器的向量数据做硬判决,将所得的二进制序列带入全部校验方程。如果校验节点所有比特值的模2和为零,则校验方程成立。如校验方程不成立,则找出使其不成立数目最多的变量节点,把此变量节点所对应的比特位进行翻转,此原理请参见文献[9]。整个BF译码过程需要不断迭代,直至所有奇偶校验方程均成立,或者达到最大迭代次数自动跳出。BF译码算法只进行比特翻转、模2加等简单的运算,没有复杂的算法,而且一旦所有奇偶校验方程满足就终止解码器,可以避免额外的迭代。本算法同样将二进制序列在变量节点和校验节点之间迭代交换。不同的是,本算法的硬判决不依靠比特翻转和模2加运算,只进行简单的加法运算。下面以式(1)矩阵H为例,检测最小环路的长度,步骤如下:
(1)参数设定:k=1,初始化长度为e的输入序列E=[Ek]1×e为全零序列。
(2)设置序列E的第k位为1,即Ek=1,其余位为0。
(3)变量节点Vb将Ek发送到每个与其连接的校验节点,该消息标记为qji,表示从变量节点Vj到校验节点Ci的消息。用Ui表示校验节点Ci接收到的信息之和,即
(3)
式(1)矩阵H中,变量节点V1与校验节点C1、C3相连,E1从V1被传递到C1、C3,序列E中的零元素也沿对应的连线传递,得到U1=1,U2=0,U3=1,U4=0。此步骤对应图2(a)。
(4)校验节点将消息发送回与之连接的变量节点。该消息标记为rij,表示从校验节点Ci到变量节点Vj的消息。用Dj表示变量节点Vj接收到的信息之和,即
(4)
其中
(5)
Nj:与变量节点Vj相连的校验节点的下标集合。
Nj/i:除校验节点Ci之外,与变量节点Vj相连的校验节点的下标集合。
由步骤(3)可知,式(1)矩阵H中有U1=1,U2=0,U3=1,U4=0。变量节点V1此刻的信息为之前变量节点V2,V4传递到校验节点C1的信息之和,即D1=0。最初传递的E1=1并没有返回变量节点V1,也就是没有形成完整环路,需要继续进行迭代。此步骤对应图2(b)。
(5)变量节点将不同的消息发送回每个连接的校验节点,定义以下变量:
Ni:与校验节点Ci相连的变量节点的下标集合。
Ni/j:除变量节点Vj之外,与校验节点Ci相连的变量节点的下标集合。
定义校验节点Cj接收到的信息值qji为其它校验节点传递到与之相连的变量节点的信息之和,即
(6)
以校验节点C1为例,校验节点C1接收到的信息来自变量节点V1、V2和V4,根据式(3)和式(6)可知,此时C1的信息值U1=0。此步骤对应图2(c)。
(6)校验节点将不同的消息发送回每个与之连接的变量节点。变量节点V1接收到的信息来自校验节点C1、C3,根据式(6)可知,V1此时的信息值D1=0,最初传递的E1=1没有返回变量节点V1,需要继续迭代。此步骤对应图2(d)。
(7)步骤(5)和步骤(6)完成一个迭代过程。重复步骤(5)和步骤(6),直到最初传递的E1=1回到变量节点V1,即D1=1时,迭代结束(如图2(e)、图2(f)所示),环路长度等于2倍的迭代次数。
(8)依次设置全零序列E的第k位为1(k=2,3,…,e),其余位为0,重复步骤(2)至步骤(7),并根据Ek的取值更新Ui、Dj取值,得到各序列在上述迭代算法中的环路长度。最终在各环路长度中取最小值,则得到LDPC码校验矩阵H所对应的Tanner图中的最小环路围长。
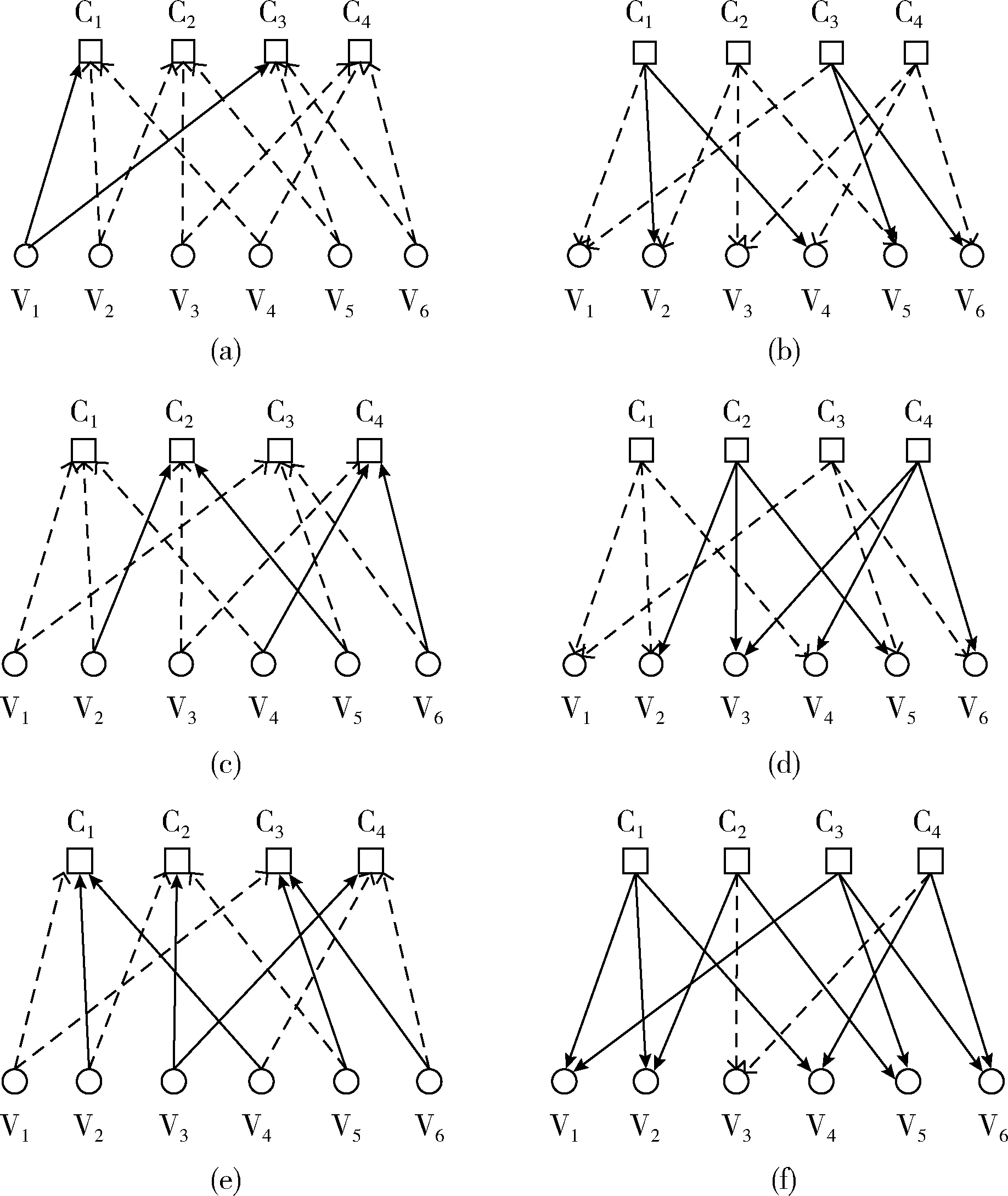
图2 当k=1时,本算法对式(1)中H的环路检测步骤
为了便于理解,下面给出算法流程如图3所示。设置循环次数为k,存放数据的集合为g。初始化令k=1,g=∅。

图3 最小环路检测算法流程
4 性能仿真及分析
校验矩阵中的环路是影响LDPC码性能的重要因素之一,本文的算法已经可以准确的检测出校验矩阵中的最小环路围长。为了验证算法的正确性和合理性,以表明矩阵最小环路围长对误码性能的影响,基于最小环路检测算法,构造一组QC-LDPC码,并进行仿真。
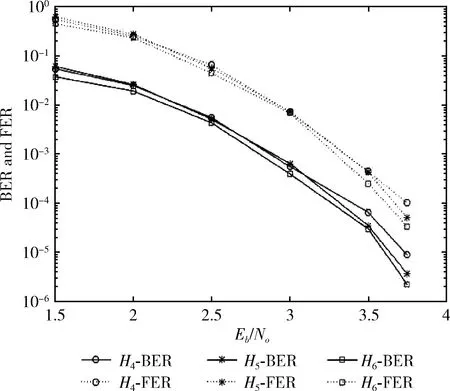
定义单位矩阵I(pn,l)的大小M=64。按照式(2)构造由I(pn,l)构成的3行5列的矩阵H,即矩阵H由15个经过循环移位的单位矩阵I(pn,l)组成。利用上述的最小环路围长检测算法,在MATLAB R2014a软件中输入矩阵H并随机改变各移位次数pn,l的值,其中0 (7) (8) (9) 译码方式选择传统BP译码算法,BP算法的主要思路是将接收到的信息在校验节点与变量节点之间迭代[10]。设置最大迭代次数为100,信噪比Eb/No为1.5 dB,2.0 dB,2.5 dB,3.0 dB,3.5 dB。 不同信噪比下,矩阵H1,H2,H3误码率(BER)及误帧率(FER)性能曲线如图4所示,其中实线表示BER,虚线表示FER。矩阵H1的数值点用圆形表示,矩阵H2的数值点用星形表示,矩阵H3的数值点用方形表示。 图4 不同信噪比下矩阵H1,H2,H3的BER及FER性能曲线 由图4中可以看出,对于行列数相同的校验矩阵H1、H2、H3,在信噪比较低的情况下,3个矩阵的误码率曲线接近,误帧率曲线也接近。但是随着信噪比的增加,在相同信噪比下,最小环路数越大,对应的误码率和误帧率就越小,即误码性能更优越。如图4所示,误码率BER=5×10-4时,矩阵H3的信噪比值比矩阵H2的信噪比值小0.06 dB,矩阵H2的信噪比值比矩阵H1的信噪比值小0.2 dB。误帧率FER=5×10-3时,矩阵H3的信噪比值比矩阵H2的信噪比值小0.06 dB,矩阵H2的信噪比值比矩阵H1的信噪比值小0.25 dB。 为验证算法的适用性,构造4行8列的矩阵H,矩阵H由32个经过左循环移位的单位矩阵I(pn,l)组成,其中单位矩阵的大小为64×64。基于环路检测算法得到一组大小相同、最小环路长度不同的校验矩阵H4、H5、H6, 且H4,H5,H6的最小环路围长依次为4、6、8,构造方法同校验矩阵H1、H2、H3 (10) (11) (12) 设置最大迭代次数为100,信噪比Eb/No为1.5 dB,2.0 dB,2.5 dB,3.0 dB,3.5 dB,3.75 dB。不同信噪比下,矩阵H4,H5,H6误码率(BER)及误帧率(FER)性能曲线如图5所示,其中实线表示BER,虚线表示FER。矩阵H4的数值点用圆形表示,矩阵H5的数值点用星形表示,矩阵H6的数值点用方形表示。 图5 不同信噪比下矩阵H4,H5,H6的BER及FER性能曲线 类似于H1,H2,H3,两组仿真的结果均验证了在相同信噪比下,增加最小环路围长能够改进QC-LDPC码的误码率和误帧率。 对比图4及图5可以发现,在相同信噪比下,对于最小环路围长相同的校验矩阵,随着矩阵的增大,误码率和误帧率的值变大,即译码性能降低。以最小围长均为4的校验矩阵H1和H4为例,当信噪比为2.0 dB时,矩阵H4的误码率约为矩阵H1误码率的5倍,矩阵H4的误帧率约为矩阵H1误帧率的5倍,这会影响QC-LDPC码在实际中的应用。如何在减少短环和扩大校验矩阵结构的同时,提高译码性能,还需要进一步研究。 本文在比特翻转译码算法的基础上,提出了一种QC-LDPC码最小环路围长的检测算法,该算法将输入的二进制序列在变量节点和校验节点之间迭代交换,把得到的输出序列做硬判决,计算特定的标识信息回传至起始节点的迭代数,环路长度为2倍的迭代次数,最小环路围长即各节点所在环路围长集合的最小值。利用上述算法构造最小环路围长递增的QC-LDPC码组,借助MATLAB R2014a软件对码组进行性能仿真,验证了最小环路围长对于QC-LDPC码译码性能的影响:增大最小环路围长,有利于降低译码的误码率和误帧率。
5 结束语
