四旋翼飞行器光流模块设计
2020-09-02李蕊冰
李蕊冰
(西安石油大学电子工程学院,西安710000)
0 引言
随着多传感融合技术的不断发展[1]和图像处理技术的不断提高,四旋翼飞行器航拍技术广受人们欢迎,其中定点悬停技术已成为航拍中不可或缺的一部分,该技术要求四旋翼飞行器定点悬停在空间中某一指定点,并完成该点处的任务。现有采用GPS 定位的四旋翼飞行器具有全天候、高覆盖率等优点[2],但其抗干扰性弱、隐蔽性差;光学动作捕捉系统定位精确度高,价格贵,适合在室内有摄像头或光照强度低的环境,且飞行器只能在摄像头捕捉到的范围内,十分受限[3]。光流模块是将光学追踪传感器PMW3901 和激光测距传感器VL53L0X 相互融合实现定点悬停技术,其精确性比GPS 定位高,价格低于光学动作捕捉系统,可以更好地服务于人类。
1 基本工作原理
(1)基本结构
四旋翼飞行器包括电调、电机、电池、桨叶、机架、飞行控制器(飞控)、遥控器等。
①电调:即电子调速器,用以控制电机的起停及转速。
②电机:安装在桨叶下边,为桨叶提供动力。
③电池:用于满足四轴的用电需求,为四轴飞行提供充足的电量。
④桨叶:为四轴提供飞行动力,有正反桨之分,顺时针旋转的桨叶为正桨。
⑤机架:是四旋翼飞行器的主干,承载了各个部分。
⑥遥控器:用于发送各种指令,控制四旋翼飞行器的飞行。
⑦飞控:不仅可以分析数据,求解姿态,还能够控制四旋翼飞行器的飞行状态。
(2)动力学模型
四旋翼飞行器是在飞控的作用下改变电机转速带动桨叶旋转,引起四轴转动。通过控制电机转动,桨叶产生不同的升力,从而控制飞行器的姿态和位置,这使得四轴在空中可以实现多种运动,如垂直升降、前后左右、顺逆时针运动等。
四旋翼飞行器的支架可分为“+”字模式和“X”模式[4]。“X”模式的支架控制响应速度快,视野开阔[5]。下面以常见的“X”模式四旋翼飞行器为例,简述几种飞行运动。如图1 所示。
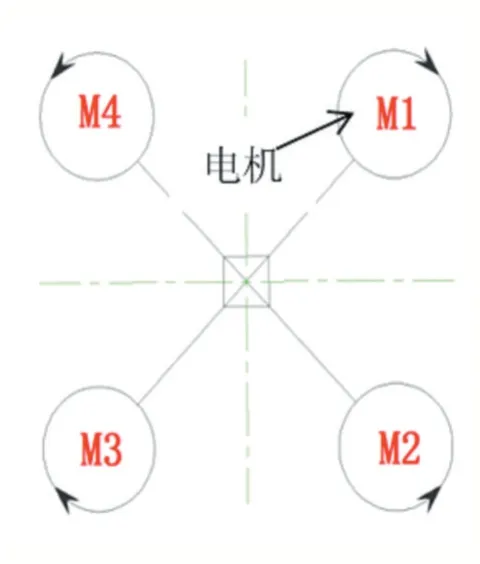
图1
①当MI、M2、M3、M4 输出功率同时增加或减小,可以实现垂直升降;
②当M1 和M4 输出功率减小或不变,M2 和M3输出功率增大时,可以实现向前运动;
③当M1 和M2 输出功率减小或不变,M3 和M4输出功率增大时,可以实现向右运动;
④当M1 和M3 输出功率减小或不变,M2 和M4输出功率增大时,可以实现逆时针运动。
2 光流模块
2.1 硬件设计
四轴由以UART 方式通信的两个主控MCU 控制,NRF51822 主要是无线通信和电源管理,STM32F411 负责读取传感器、融合数据等。承接在STM32F411 主控芯片上的是以IIC 方式与四轴通讯的九轴传感器MPU9250 和气压传感器BMP280,该传感器可以测量四轴姿态数据和气压等。其硬件系统框架如图2所示。
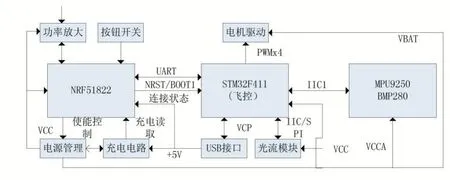
图2
光学追踪传感器PMW3901 是原相公司研发的,可测量0.8 米以上的水平距离,工作电流小,电压易满足。1.8V 和3.0V 的LDO 分别提供给VDD 和VDDIO,SPI 接口连接SPI2,片选信号为PA8,LED1 为红外LED。
激光测距传感器VL53L0X 包含红外接收器和激光发射器,利用接收到光子的时间计算距离,测距更加精准。该传感器通过下拉电阻得到最佳电压,使用IIC通信接口,通信最大速率400K。图3 为光流模块与飞控的连接框图,图4 为光流模块的实物图。
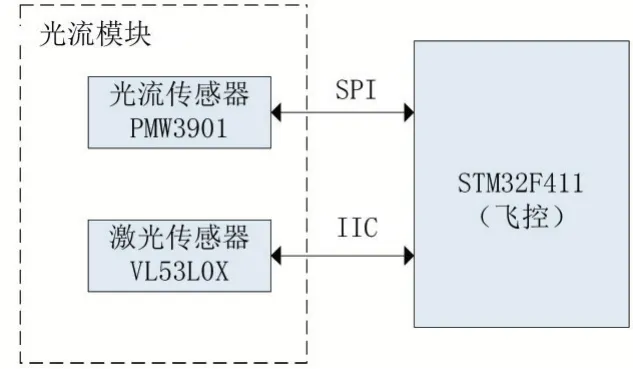
图3 连接框图

图4 实物图
2.2 软件设计
NRF51822 主要负责无线通讯和电源管理,遥控器发送数据通过无线通信传至系统等进行解析,如果不是发送给NRF51822,则途经串口驱动转发给STM32F411,当STM32F411 收到数据包时,又原路返回给遥控器,因此,该传感器就搭建了通信桥梁。
STM32F411 是四旋翼飞行器的核心,主要负责传感器的读取,数据的融合等。当接收到遥控器发送的数据时,经过无线通信和数据接收包发送给四轴,待四轴解析完数据进行分类后转发给电机,电机带动桨叶旋转,完成相应的飞行动作。
光学追踪传感器PMW3901 与四轴采用SPI 的通信方式,其源码由底层SPI 驱动和光流数据通信组成。底层SPI 驱动配置有2 线全双工,2M 波特率和主机模式。SPI 的收发均使用DMA 的方式,接收DMA使用DMA1 数据流3,发送DMA 使用DMA1 数据流4。激光传感器VL53L0X 与四轴采用IIC 的通信方式,通信源码主要有底层IIC 驱动和激光测距应用。底层IIC 驱动配置2 个通用I/O(PB4/PB5)模拟IIC。每一部分都有其相应的程序代码,图5 为软件系统控制框图。
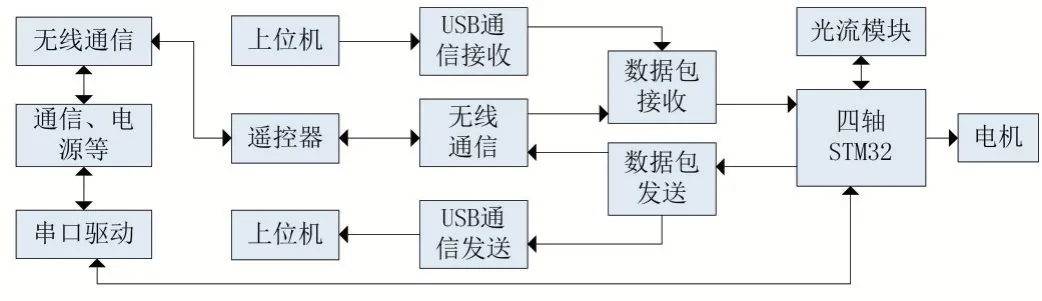
图5 软件系统框图
3 实验分析
以匿名科创地面站为背景,用USB 数据线将四轴与电脑连接起来,电脑端呈现出虚拟四旋翼飞行器,分析、记录数据,进行室外飞行,重复以上操作,多次实验,得到相关结果。图6 为虚拟四旋翼飞行器的控制状态图,图7 为在该控制状态下的波形图。
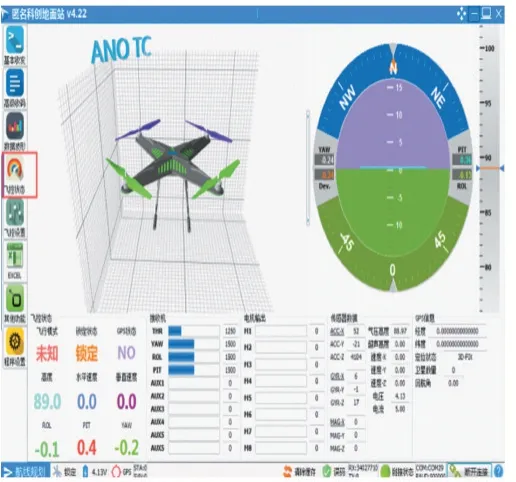
图6 控制状态图
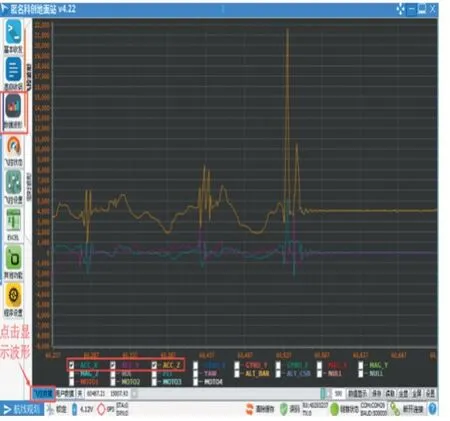
图7 波形图
4 结语
本文在现有四旋翼飞行器技术的基础上,对其进行更精准的定点悬停技术改进,从硬件和软件两部分介绍了实现定点悬停技术的方式方法,通过大量实验论证分析及室外试飞检测,验证了该技术的可行性、可靠性、稳定性及精确性满足需求。
