基于行人影响的信号交叉口右转车辆跟驰模型
2020-09-01魏福禄张斐然郭永青
魏福禄,张斐然,郭永青*,刘 攀,郭 栋
(1.山东理工大学交通与车辆工程学院,山东淄博255000;2.东南大学交通学院,南京210096)
0 引 言
行人在交通事故中容易受到伤害.据统计,全世界1/3的交通事故都与行人有关,根据欧盟对交通事故数据的分析,行人死亡数据是车内乘车人的9倍.在交叉口处,由于转弯车辆与行人冲突导致的人车事故居多,人对车的影响、车对人的影响都会对车辆的跟驰行为产生影响,威胁着人、车安全.
在过去的几十年间,跟驰模型伴随时代的进步得到快速的发展和迭代更新[1-4].跟驰模型研究跟驰车与前导车之间的位置、速度和加速度等因素之间的应变关系.1953年,Pipes等[1]提出首个跟驰模型,该模型自变量相对单一,只考虑相对速度的影响.为贴切描述信号交叉口车辆停止与启动状态间的转换现象,Bando 等[2]利用优化速度函数提出优化速度(OV)模型.广义力模型、全速度差模型的提出,使得OV模型得以持续改进,具有更好的稳定性[3-4].考虑国内外交通流特征的差异,需要采集国内数据进行分析和建模,以提升模型对我国交通流理论的适应性.
近年来,随着深度学习、控制论等理论方法及智能交通系统的快速发展,跟驰模型具有新的特性,更加侧重于“车—路”(Vehicle-to-Infrastructure,V2I)、“车—车”(Vehicle-to-Vehicle,V2V)信息交互与相互作用,通过分析信息化环境作用下跟驰行为对交通流特性的影响,能够为复杂环境下微观交通仿真、智能驾驶提供基础理论[5-7].鉴于V2V、V2I 技术在车辆中使用时,可以提高车辆的性能,使驾驶员反应时间缩短,并能够预判交通流的变化趋势,从而对车辆状态进行调整,交通运行和驾驶行为特性都会随之改变,跟驰模型的发展也开始倾向于考虑环境对跟驰行为的影响[8].2018年,Wang 等[9]基于FVD模型,提出V2V 环境下无信号交叉口车辆跟驰模型,结果表明,模型可以预测潜在冲突并通过提前采取措施来避免,从而提高驾驶的运行效率与安全性.综上所述,车联网、大数据、无人驾驶等新技术的兴起,为跟驰模型的发展提供新的机遇,也对跟驰模型提出更细致的要求.
目前,跟驰模型多数只考虑路段上的跟驰行为,缺乏对车辆转弯过程跟驰行为的研究,特别是针对中国行人过街特性的复杂环境影响下车辆转弯跟驰行为的研究.因此,本文针对信号交叉口行人影响下右转车辆跟驰行为开展研究,力图构建能够反应信号交叉口过街行人影响的右转车辆跟驰模型,以实现对特定复杂场景下跟驰行为的精细化当量描述,支持跟驰理论向纵深发展.
1 右转跟驰模型的建立
考虑OV模型能够描述交通流时走时停的现象,符合交叉口右转车辆的运行特性,故本文以OV模型为基础提出改进的优化速度模型.虽然OV模型的核心思想是以车间距优化计算跟驰车的最优速度,但是车间距这单一因素对转弯过程中的跟驰行为影响考虑还不够全面,且该模型容易产生过高的加速度以及不符合实际的减速度;另外,过街行人也是转弯驾驶过程中不可忽略的重要影响因素,所以本文在场景1和场景2中改进优化速度函数,在场景3中构建改进的OV模型,并进行模型的标定与验证[5].
在实际的信号交叉口,驾驶员要根据驾驶倾向性和行人通行状况来决定是否在行人允许通行的条件下穿越人行横道,激进的驾驶员会选择强行穿越,如图1(a)所示,而不满足车辆穿行条件时,驾驶员只能选择减速缓行甚至停车,等待行人优先通过人行横道,如图1(b)所示.为研究不同情况下的跟驰行为,需要建立不同场景下的跟驰模型.

图1 场景构建Fig.1 Scenario construction
1.1 场景分析
研究范围为右转车道与人行横道冲突位置处,包括车头刚进入人行横道、车尾刚驶离人行横道及右转车队在右转专用道行驶过程中.假设车辆在右转过程中全部在右转车道的中心线上行驶,即同一交叉口所有右转车辆的右转半径均相同.确定3种不同场景的交通流运行情况,即:无行人通过、有行人通过但是车辆需要等待、有行人通过但是车辆非法穿越.具体场景如下.
场景1:第n辆车驾驶员驾车进入交叉口,没有等待的行人,驾驶员正常通行.
场景2:第n辆车驾驶员驾车进入交叉口,发现有行人正在通行且无法穿越,驾驶员选择减速缓行,甚至会在人行横道前停车等待行人完全通过.
场景3:第n辆车驾驶员驾车进入交叉口,发现有行人正在通过且车辆有穿越空间,驾驶员选择减速非法穿越,行人则会等待.
1.2 场景1的跟驰模型
根据场景1的描述,判定在该场景下车辆的运动状态没有改变,即满足第n辆车已驶离人行横道,或该车不是头车,或在绿灯条件下没有行人通过,或等待通过人行横道,表达式为

式中:k为驾驶员的反应灵敏度系数为t时刻第n辆车的速度(m/s);为t时刻两车的车间距(m);xn(t)为t时刻第n辆车的位置;r为转弯半径(m);为车辆转弯时的优化速度函数,即

1.3 场景2的跟驰模型
根据场景2的描述,驾驶员驾车通过人行横道前,发现人行横道上有行人通行,且车辆无法穿越,采取减速慢行措施.若车辆一直无法进行穿越,则会在人行横道前停车等候,值得注意的是,该场景下车辆速度主要考虑行人通行的影响.此场景下右转车辆的跟驰模型,即

其中,

式中:a,b,c是不为零的待定参数为时间tp内过街行人平均流率(人/s),指每个相应车速区间内所对应的过街行人的平均流率;t为车辆行驶时间(s);Q为行人过街数量(人);tp为行人通过冲突区域平均时间(s).
1.4 场景3的跟驰模型
根据场景3的描述,驾驶员驾车通过人行横道前,发现人行横道上有行人通过,且满足车辆穿越间隙,部分激进的驾驶员会加速至最大允许速度后非法穿越人行横道,导致行人等待车辆穿越动作完成后再通行,对行人的通行效率和安全产生潜在的影响.此场景下右转车辆的跟驰模型为[3]

2 数据采集与参数标定
2.1 跟驰数据的采集
为获取高精度的跟驰数据,本文采用大疆“悟”2 专业级无人机在信号交叉口中心距离地面100 m的高度上垂直录像,范围涵盖整个交叉口和进出口引道.在良好的天气条件下,对山东省淄博市张店区南京路—人民西路信号交叉口、北京路—新村西路信号交叉口、南京路—新村西路信号交叉口进行数小时的实地拍摄,这3个信号交叉口右转车辆和行人数量较多,采集的数据更切合实际且准确,连续变量描述如表1所示.对采集到的视频导入Kinovea 视频处理软件进行处理,如图2所示,Kinovea 主要应用于运动分析领域,也可以应用于交通数据提取领域,该方法的有效性已被许多研究证明[7].
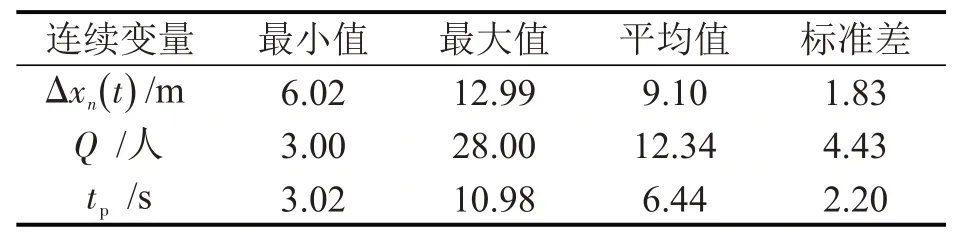
表1 连续变量的描述性统计Table1 Descriptive statistics of continuous variables

图2 跟驰数据的提取Fig.2 Extraction of car following data
对数据进行预处理,剔除个别错误数据后,共采集到820条有效跟驰数据,如表2所示.
2.2 优化速度函数的标定
本文获取的是以0.04 s为采集间隔的车辆右转非法穿越人行横道时的跟驰数据,采集项目包括:车头间距、前后车速度、行人通过冲突区域时间、行人等待数量和行人过街数量.在场景2中,影响后车跟驰行为的主要是行人和前车位置这两个因素,其中,更为重要的是行人,因为当前车已经穿越人行横道后,后车与前车已保持一定的间距,此时,行人成为后车速度变化的主要原因,因此,改进的优化速度模型引入行人通行效率.
如果直接探求速度与行人通行效率的关系,很难发现其规律性,故根据表2将车速划分为整数区间,计算每个整数区间内车速的平均值,并求出与之对应的所有过街行人平均流率S,实现聚散为整.在本文中,车速集中在1~8 m/s,划分7个整数区间,每个整数间隔内的数据量充足.连续函数中的点并不是一个独立的数据点,而是由对应车速区间内所有采集数据求平均而得.以行人过街平均流率为横坐标,以右转跟驰车辆整数区间内平均速度为纵坐标,作散点图,如图3所示.
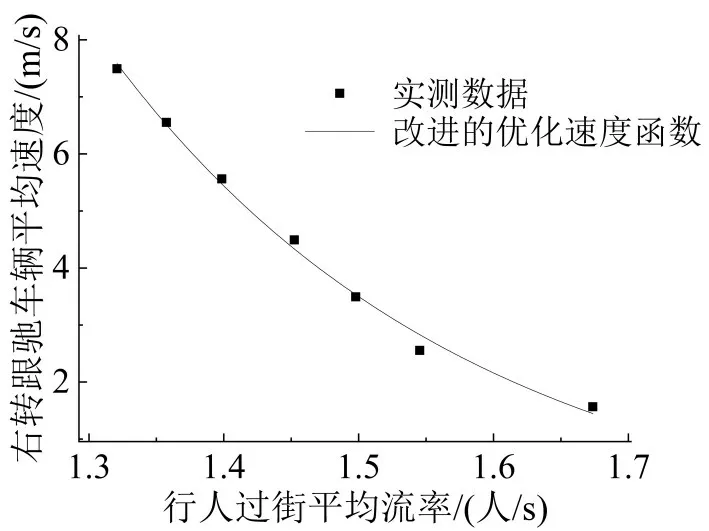
图3 行人过街平均流率—右转车辆平均速度关系Fig.3 Relationship between the average pedestrian flow rate and average right turn vehicle speed
由图3可知:跟驰车的平均速度随行人通行平均效率数值增加而减小,即平均通行效率在数值上与速度呈负相关.针对这一特征,构建基于指数函数的复合函数拟合该曲线,函数表达如式(4).根据实际数据进行参数标定,结果如表3所示.
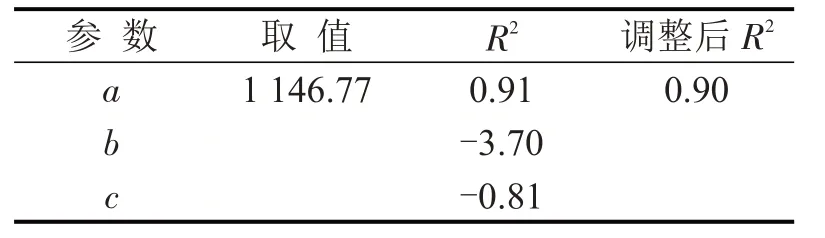
表3 改进的优化速度函数参数标定结果Table3 Improved calibration results of optimal velocity function parameters
由表3可得,拟合优度R2值为0.91,证明拟合的改进优化速度函数与实测数值有较高的相关性,故在场景2中改进后的优化速度函数表达式为

3 模型仿真与分析
根据所建模型,利用MATLAB 对各个场景分别进行仿真与分析.在模拟过程中,假设右转车辆以13.8 m/s的速度到达交叉口,观察是否有行人穿越,并做出下一步驾驶决策,驾驶员和行人的运动过程是相对独立的,彼此并不会提前知道对方会做出何种决定和采取何种行动.此外,驾驶员做出是否通行的决定主要是由行人通行中的可穿越间隙判断,可穿越间隙的衡量尺度为行人平均通行效率.而行人能否顺利、不受阻挡的通过人行横道,则由行人通行时右转车辆的每一时刻的瞬时速度来判定,安全是行人通行时考虑的最重要因素.
在场景2和场景3中,为更好地对比改进的模型和OV模型的区别,采用速度因素进行分析,速度的变化能最直观的反应外界影响的变化,如图4所示.
在场景2中,假设行人平均通行效率(S)为常数1.35 人/s,图4(a)与图4(b)分别是OV模型与改进后的OV模型的仿真模拟效果.图4(a)显示的是OV模型中,车辆以紧急刹车的方式在人行横道前停车等待,速度出现骤降,这正是OV模型容易造成过高的减速度缺点的体现;图4(b)表明在改进的OV模型中,驾驶员发现人行横道上有行人通行,这时驾驶员谨慎行驶,保守的驾驶员会选择避免与行人发生冲突而减速行驶,此时驾驶员在博弈的过程中会有极小幅度的速度波动,并在人行横道前的安全距离处停车等待,行人完全通过后,车辆才会加速驶离人行横道,此时速度表现出较大幅度的跳跃,且车辆在以6 m/s左右的速度运动期间,根据优化速度函数可知此时行人的平均通行效率约为1.37 人/s,与仿真时假设的行人平均通行效率大致相同,因此,在车辆停车等待的20 s 期间,约有27人通过人行横道.

图4 场景2中OV模型改进前后右转车辆跟驰速度仿真Fig.4 Simulation of right turn vehicle following speed before and after improving OV model in scenario 2
在场景3中,图5(a)为采用OV模型仿真交叉口右转车辆跟驰速度的变化,右转车辆发现前方有行人通过,将速度从13.8 m/s 大幅减速至4.2 m/s,穿过行人间隙又加速离开,加、减速幅度都比较大;图5(b)为改进后的OV模型的仿真效果,部分激进的驾驶员会选择在行人通行间隙中强行穿越人行横道,在穿行前速度会由13.8 m/s 降至8.3 m/s,穿越完成后加速离开,速度波动较小,更加符合实际情形.
比较改进的右转车辆跟驰模型与传统的OV模型,可以看出改进后的右转车辆跟驰模型更符合实际情况,且克服了传统OV模型加、减速度过高的问题,能更好的描述右转车辆的跟驰行为.
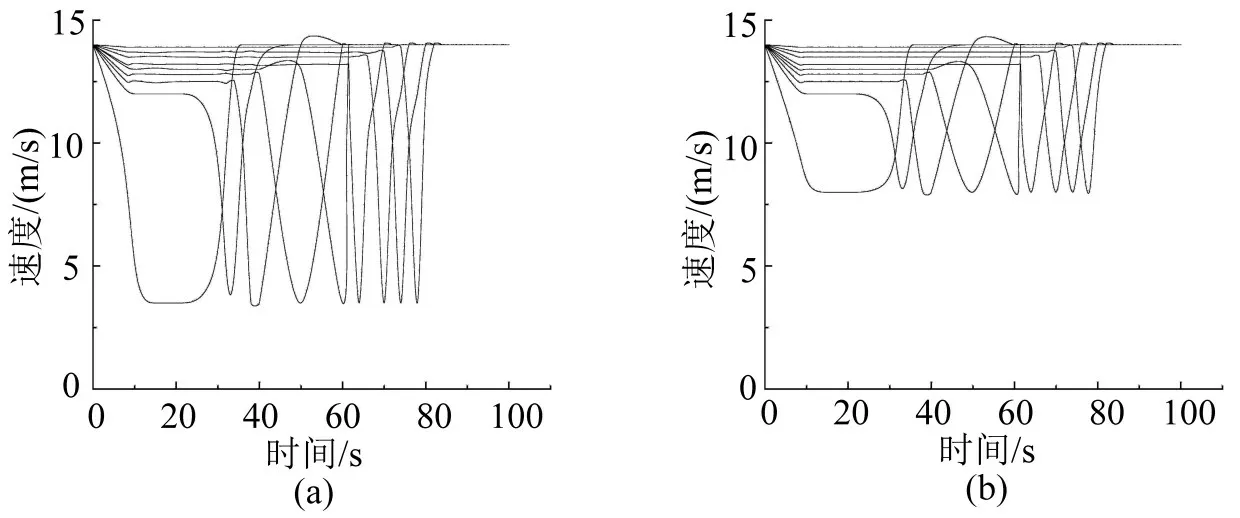
图5 场景3中OV模型改进前后右转车辆跟驰速度仿真Fig.5 Simulation of right turn vehicle following speed before and after improving OV model in scenario 3
4 结 论
本文对信号交叉口行人影响下的右转车辆跟驰行为进行研究.将应用场景设定为交叉口右转弯车辆的跟驰过程,考虑车间距、行人、转弯半径等因素对跟驰模型的影响,设计了无行人等待、有行人等待且右转车辆无法穿越、有行人等待且右转车辆非法穿越三种场景,进行数据采集与分析,通过研究行人通行效率对右转弯车辆跟驰行为的影响,对优化速度函数进行改进,建立了基于行人影响的信号交叉口右转车辆跟驰模型.数值仿真结果表明,新建模型比传统优化速度跟驰模型所考虑的因素更有针对性,能更贴切而精准的刻画交叉口右转车辆跟驰行为的变化规律.未来还可以专门研究非机动车过街特性对信号交叉口转弯车辆跟驰行为的影响,以及行人影响下信号交叉口无人驾驶汽车跟驰策略及算法等方面的内容,从而进一步丰富信号交叉口转弯跟驰相关理论.