城市水下特长隧道中部坡道错觉改善研究*
2020-08-26倪玉丹杜志刚
倪玉丹 杜志刚
(武汉理工大学交通学院 武汉 430063)
0 引 言
受地质条件的影响,城市水下特长隧道纵断面一般设计为“U”形、“V”形或“W”形[1],从隧道纵断面线性可以看出,城市水下特长隧道变坡点较多,长坡线形特征明显,研究发现城市隧道纵坡坡度变化比速度更易引起驾驶员的紧张情绪,纵坡路段事故率高达50%[2-3].城市水下特长隧道变坡点附近驾驶员除进行常规驾驶任务外,还需要进行后坡朝向判断进而做出驾驶决策,驾驶负荷急剧增加,连续上下坡路段变坡点附近还可能存在坡道错觉的视错觉现象,行车安全存在潜在风险.
国外研究主要集中在通过数学模型研究坡道安全,Miaou[4]通过实地调查数据建立了纵坡坡度与事故数的函数关系表达式,结果指出纵坡坡度减小1%,事故数将减少8%;Silyanov[5]建立了事故率与坡度的直接关系,发现6%的坡度为事故率变化的突变点,当坡度小于6%时事故率增长率较小,坡度大于6%时事故率急剧增加;在坡度判断的改善研究方面,Oliver等[6]对影响坡度判断的因素进行了研究,并指出斜坡表面纹理对坡度判断具有重要影响.Shunsuke等[7]提出在道路两侧设置倾斜立柱矫正坡度感,降低行车速度.而国内主要集中在长下坡路段线性研究,王开阳[8]对国内外高速公路连续下坡路段主动与被动安全对策进行了阐述,提出基于安全等级的长大下坡安全管理办法.张娟等[9]研究发现驾驶员对下坡的敏感度较低,连续下坡为陡坡加缓坡加陡坡的形式时安全性较低.
目前坡道安全研究主要集中在单一坡道的行车特性及安全改善方面,而未缺少连续坡道变坡点处坡道错觉对行车安全的影响,本文研究连续坡道变坡点处坡道错觉形成机理,并基于此提出坡道错觉改善方法.在城市水下特长隧道连续下坡、连续上坡、上坡接下坡和下坡接上坡这几种变坡点中,连续上坡和连续下坡危险度最高,驾驶人会对后坡的坡道朝向产生与实际坡道不同的感知,进而错误地提速或降速,造成变坡点附近追尾、撞击等事故.同时连续下坡路段由于“热衰退”现象,车辆控制难度加大,其危险度更高于连续上坡路段,因此本文以危险度最高的连续下坡为研究对象,分析坡道错觉影响因素,进而提出相应改善意见.
1 坡道错觉形成机理分析
1.1 坡道错觉概念
坡道错觉即驾驶人在行车过程中由于所处行车环境使坡度感知能力下降,产生与实际坡度不同的感知,见图1.对于前陡后缓的连续下坡不良组合路段,驾驶人长时间在相同坡度上行驶,坡度感知发生偏差,形成后坡为上坡的坡道错觉.

图1 坡道错觉
依据调查数据分析表明,对于下坡路段,车辆行驶到坡底位置时,一般速度会超过限速值约30%,超速车辆数约占一半,驾驶人对于车辆的控制难度加大.而城市水下特长隧道纵坡参数变化众多,驾驶人在变坡点附近,由于隧道内空间狭小,侧壁景观单调甚至缺失,缺少合适的视觉参照信息对路面坡度进行准确的判断,驾驶负荷进一步加剧,极易错误的判断坡度情况,做出错误的驾驶操作,不利于隧道行车安全.
1.2 坡道错觉产生原因
1.2.1隧道内部环境对坡道错觉的影响
除驾驶员本身的视觉特效和心理特性外,隧道内的道路环境是诱发坡道错觉的主要原因.人对空间中物体位置方位的感知是通过外部环境所组成的视觉参照系来判断的.城市水下特长隧道内部环境与开放性道路有明显差异,其内部视觉环境单一,驾驶员的参照物主要为隧道路面及洞顶灯带等构成的纵向信息,依据其走向判断自身所处空间状态.而隧道内部缺乏横向的视觉参照,驾驶人视线和坡道长期保持平行,参照物由水平面变为倾斜地面,由于知觉恒常性,其视觉参照系逐渐发生改变,驾驶员对外界的认知发生误判,从而感知到后坡由下坡变为上坡,见图2.
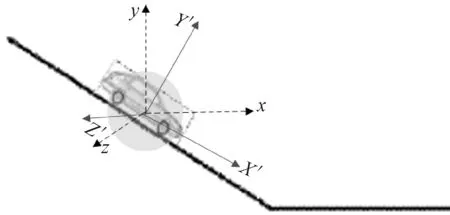
图2 驾驶员视觉参照系旋转示意图
1.2.2隧道线形对坡道错觉的影响
道路线形引起的坡道错觉是由于不良道路设计和不良的组合形式,城市水下特长隧道连续坡道众多,其坡度、坡长,以及竖曲线形式的不同,也会对坡道错觉产生影响,导致驾驶人视觉误判.前后坡的坡度差为变坡点处主要的变化因素,研究表明,驾驶员而对于坡度差的敏感度远高于坡度[11],而多大的坡度差会引起坡道错觉国内外的规范中并没有相关规定,仅规定线形平顺及纵坡值.因此,本文以连续下坡路段作为研究对象,试图探究坡度差对坡道错觉的影响.
2 坡度差对坡道错觉的影响分析
2.1 实验场景设计
根据文献[12]可知,设计速度≤60 km/h时,行车道宽3.25 m,检修道宽0.75 m,路缘带宽0.25 m,隧道限高4.5 m.根文献[13]可知,隧道中间段采用基本照明,保证亮度1.0 cd/m2以上.由于LED灯具有能耗低、高光效、长寿命、易配光、智能调控等优点,且因为城市水下特长隧道位于城市中心,为营造一个舒适、美观、安全的行车环境及目前运营对节能较高的需求,采用LED作为隧道照明的主光源.选取前坡为5%,后坡坡度分别为0,1%,2%,2.5%,3%,4%的6组连续下坡路段,行车速度60 km/h,模型见图3.
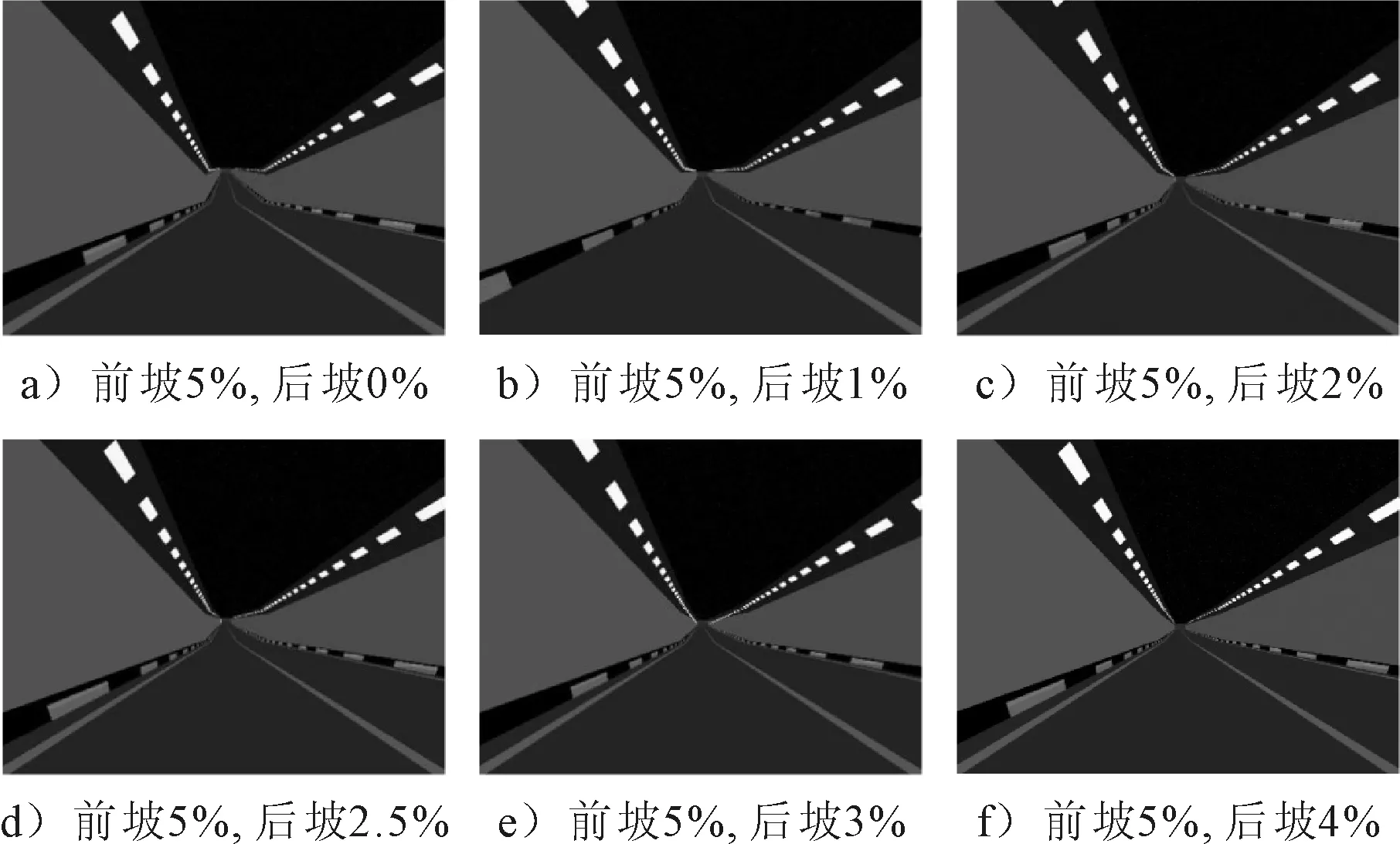
图3 不同坡度差连续下坡路段试验场景
2.2 实验过程
挑选30名被试(21男、9女,平均年龄23.3岁,标准误差1.72)参与实验,所有被试校正后均视力正常.实验场景共有6组,一组水平条件和五组坡度条件.实验开始前为被试调试模拟器及软件平台,告知被试实验流程,在计算机上通过E-prime软件播放仿真视频,要求被试专注目光集中在道路前方,实验指标:①在视频播放19.5 s(距变坡点75 m,研究表明驾驶员在隧道内光照环境为1 cd/m2、速度为60 km/h时其视认距离为75 m)时通过提示音提示被试对后坡走向(上坡、下坡或平路)做出判断;②播放实验视频,要求被试在感知到后坡实际朝向时进行按键操作(上坡或非上坡),E-prime软件自行记录反应时间.两次实验随机进行,无固定顺序,被试进行一次实验后休息一轮再进行第二次实验.
2.3 实验结果分析
实验结果见表1.
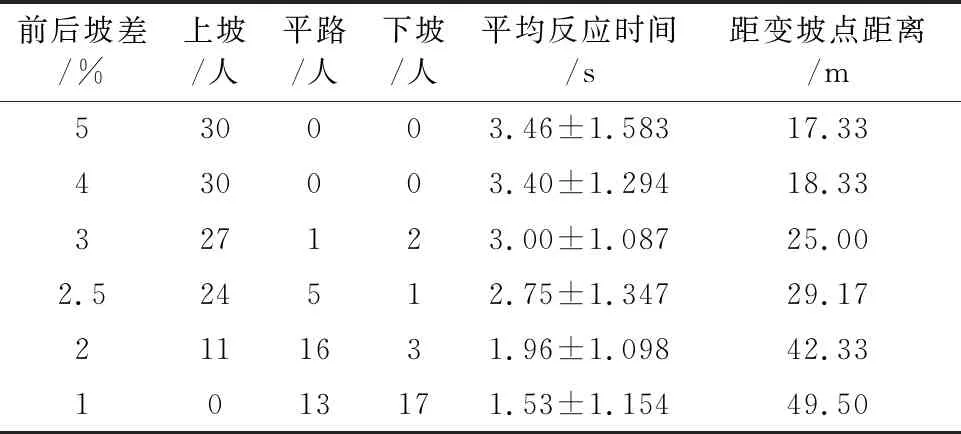
表1 不同坡度条件下后坡走向判断结果
实验结果表明,城市水下特长隧道变坡点处坡道错觉与前后坡的坡度差有关.在前陡后缓的连续下坡组合路段,坡差为1%时坡道错觉不明显,但部分驾驶人认为自己行驶在平路上,说明长时间在坡道上行驶驾驶员坡度感知能力减弱,视觉感知开始发生误判;前后坡差达到2%时坡道错觉开始产生,即将后坡的下坡判断为上坡;当前后坡差达到2.5%以上时坡道错觉非常明显,并随着坡差的逐渐增大而加剧.
通过对比驾驶人察觉到后坡实际朝向的反应时间和距离变坡点的距离可以发现,坡度差小于1%时驾驶人对于后坡朝向的判断平均反应时间为1.53 s,距变坡点49.5 m,能够保证有充足的操作时间以做出正确的驾驶决策;在坡度差超过2%后驾驶员反应时间增长1.96 s,距变坡点前42.33 m处才能辨别后坡朝向,随着坡差的逐渐减小,驾驶人对后坡朝向的反应时间逐渐减小,距变坡点的距离逐渐缩短,当前后坡差达到4%时,驾驶员到距变坡点17.33 m处才能对后坡朝向做出准确判断,应变操作时间极其短暂,不能保证驾驶员在变坡点处做出正确的决策和操作,变坡点处行车安全存在极大隐患.
3 改善研究与实验验证
3.1 坡道错觉改善设计
由于城市道路限速比公路低,照明环境相对公路隧道更好,城市隧道管理者和使用者认为城市隧道危险性远低于公路隧道,基本不会对驾驶人产生影响.因此该路段管控措施几乎未见,严重缺乏对驾驶人的行车引导和安全提醒,且在驾驶人行车过程中逐渐变化的隧道壁高度、逐渐变窄的驾驶空间以及有限的视距等,这些环境因素在一定程度上将会加剧坡度对驾驶人的影响,导致驾驶人的行为和心理特性发生很大变化.同时,由于隧道内横向参照信息缺失,驾驶人坡度感知能力减弱,进一步增加事故发生的危险性.
结合变坡点处坡道错觉形成机理,可以在调节坡度感知的因素列表中加入横向参照信息.驾驶员在变坡点前坡行驶时,视点上移,视觉感知上延伸了视野范围内的后坡长度,从而对后坡坡度产生高估,横向信息的设置可以压缩坡长,使视觉向横向延展,降低坡度判断误差,缓解坡道错觉.改善方案见图4,深色沥青5 m,以50 m一道设置在变坡点前后,共设置八道.
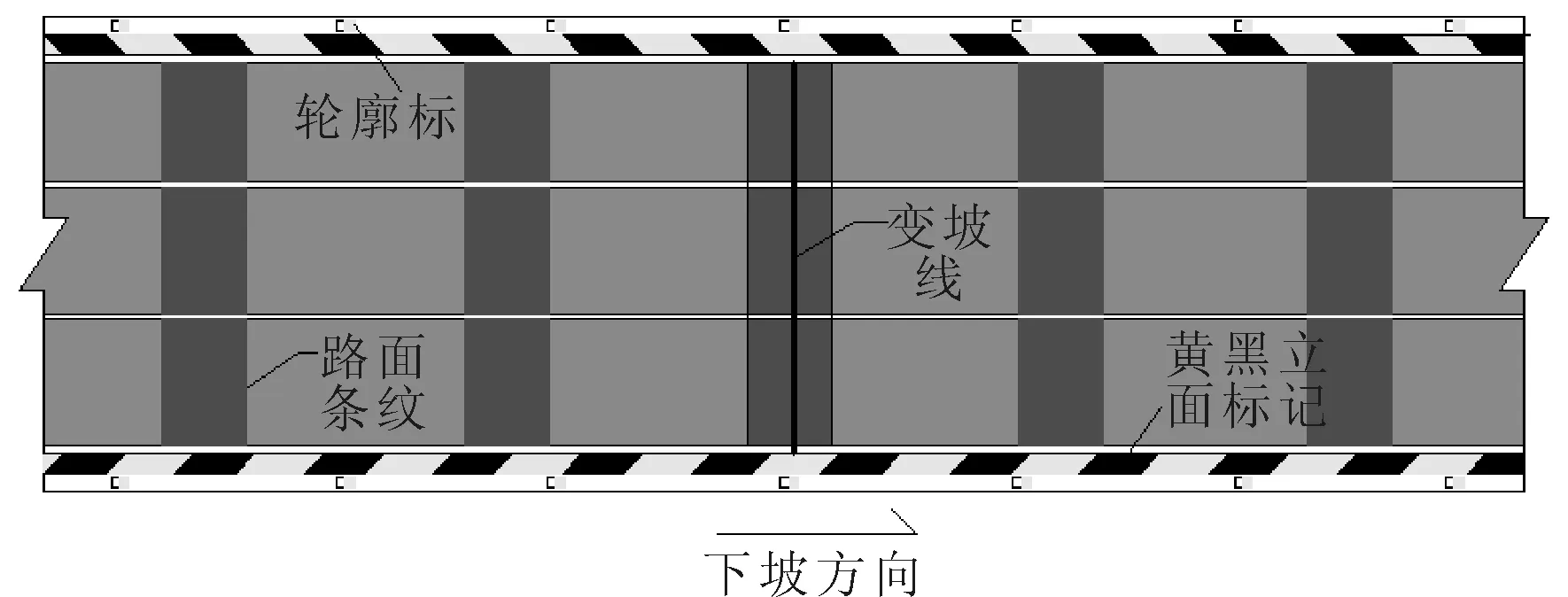
图4 路面条纹方案图
隧道内视觉环境单一,缺乏视觉参照系所需的空间参照信息,坡道上驾驶员视觉参照系发生旋转而造成坡度感知发生偏差.而隧道环境与开放式道路空间不同,可以利用隧道密闭环境,沿隧道侧壁设置LED灯带,通过隧道顶部逐渐向下延伸的空间感,强化变坡点处坡度感,矫正坡道错觉.改善方案见图5,LED灯带灯体半径为0.1 m,以50 m距离设置在变坡点前后的侧壁及顶部,共设置6道.
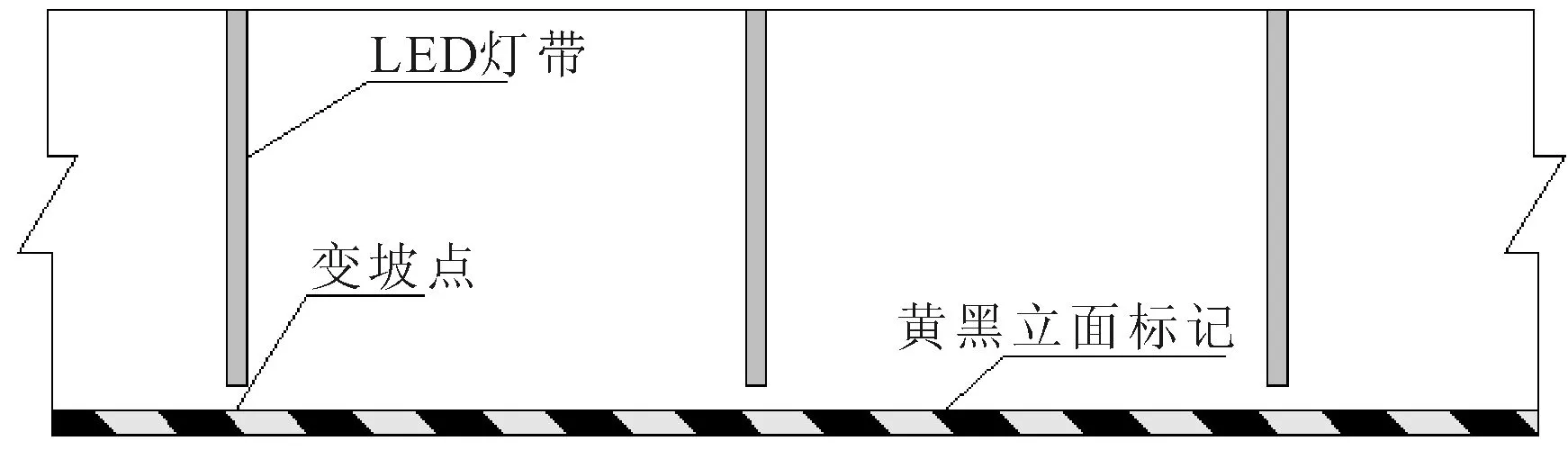
图5 LED灯带方案图
3.2 实验验证
3.2.1实验场景设计
实验设计应该以最不利条件进行方案有效性检验,以最大化检验改善方案的优化效果,故以坡道错觉最明显的连续下坡路段,即前坡5%、后坡1%的组合路段为例对改善方案进行实验验证.利用3DMAX仿真软件以1∶1的比例搭建仿真模型,见图6.实验方法同前,以后坡坡度朝向判断和反应时间为实验指标,评价改善方案对驾驶员在变坡点坡道错觉的改善效果.
3.2.2实验结果分析
实验结果见表2.
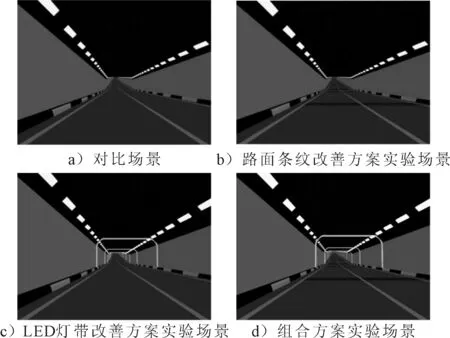
图6 城市水下特长隧道坡道错觉改善方案实验场景

表2 城市水下特长隧道坡道错觉改善方案实验结果
对3组坡道错觉改善方案及原始状态结果进行对比分析发现,在前后坡差为4%的连续下坡路段:①实验场景b)中驾驶员的后坡朝向判断准确性为0,但坡度感知矫正程度达到16.67%,反应时间无明显变化,说明在变坡点前后设置路面条纹横向信息对于坡道错觉具有一定改善效果,但效果不明显;②实验场景c)中驾驶员对于后坡朝向判断准确性提升6.67%,同时坡度感知矫正60%,仍有40%驾驶人对于后坡朝向判断存在错觉,同时反应时间减少0.56 s,表明在后坡设置LED灯带可一定程度上改善变坡点处坡道错觉效应,说明LED灯带的视觉诱导性及空间感可以强化变坡点处的坡度感;③组合方案对于变坡点坡道错觉改善效果最佳,后坡朝向准确性达到26.67%,坡度矫正93.33%,反应时间减少1.42 s,表明空间信息加上横向参考信息的组合方式能够最大程度上加强驾驶员的坡度感知能力,建议对存在坡道错觉的城市水下特长隧道变坡点可采取路面条纹与LED灯带的组合方案进行改善设计.
4 结 论
1) 城市水下特长隧道坡道错觉的产生与隧道内部环境有关,由于长时间在同一坡度的坡道上行驶,驾驶员视觉参照系发生旋转而导致对后坡朝向产生误判.
2) 城市水下特长隧道变坡点处坡道错觉同时也与道路线形有关,主要因素为前后破的坡度差,以连续下坡路段为例,前后坡差达到2%时坡道错觉开始产生,前后坡差2.5%以上坡道错觉明显.
3) 推荐在城市水下特长隧道变坡点处设置地面条纹和LED灯带的组合方案,被试对于后坡朝向判断准确性和坡道错觉矫正程度均得到较大幅度的提高,同时反应时间减小,说明空间信息与横向参考的组合信息对于坡道错觉具有较好的改善效果.
本文对城市水下特长隧道变坡点处坡道错觉的改善研究中的交通设施的设置间距仅选用常规的间距值,未对不同的设置间距进行研究,这也是之后研究的重点.
