一种三参数统一化动量方法及其最优收敛速率
2020-08-25丁成诚
丁成诚 陶 蔚 陶 卿
1(中国人民解放军陆军炮兵防空兵学院信息工程系 合肥 230031)2(中国人民解放军陆军工程大学指挥控制工程学院 南京 210007)(dcc18851507462@163.com)
无论是经典的正则化损失函数框架,如稀疏学习和支持向量机,还是当前的研究热点深度学习,如卷积和递归神经网络,都可以视为给定模型空间的参数寻优问题,随机梯度下降法(stochastic gradient descent, SGD)是解决这类参数寻优问题简单而又有效的方法.为了获得更好的收敛性能,人们开始在SGD的基础上使用动量方法.
动量实际上是物理学中的一个概念,动量原理告诉我们运动的物体会因为惯性继续保持运动,除非受到外力作用而停下来.在优化算法中,动量方法可以在梯度很小的情形下仍然保持更新,从而可以加速SGD在求解凸优化问题时的收敛速率[1-3],帮助SGD在求解非凸优化问题时摆脱局部最优点[4-5].对于随机优化问题,由于动量可以分解成过往梯度加权平均的方式,因此比SGD具有更小的方差,据此使算法获得了更好的收敛性和稳定性[6].
我们通常讨论的动量方法有2种标准形式:一种是由Polyak于1964年提出HB(heavy ball)方法[7];另一种是Nesterov于1983年提出的NAG(Nesterov’s accelerated gradient)方法[8].HB的加速性主要体现在目标函数强凸且二次可微时,尽管与梯度下降法、NAG具有相同的线性收敛速率,但HB具有最小的收敛因子.NAG的加速性主要体现在求解凸光滑目标函数时,可以将梯度下降法的收敛速率加速至最优O(1t2),其中t是迭代步数.对于非光滑凸优化问题,SGD,HB和NAG具有相同的最优平均收敛速率,但对于个体收敛性,HB和NAG也具有加速效果,可将SGD的个体收敛速率从O(log加速至最优的[1-2].
在深度神经网络训练中,使用动量优化方法替代无法选取合适步长的SGD,已经在计算机视觉等方面取得了很好的效果[9].Ochs等人通过实验验证了批处理形式的HB方法能够逃离局部最小值点[4].2019年Sun等人从理论上证明了HB方法比GD方法有更大的步长从而可以逃避鞍点[5].而NAG也表现不凡,可以提高RNN在许多任务中的性能[10].
目前,人们已经将典型的动量优化方法写进了深度学习的优化器中.随着优化方法进一步发展,出现了众多形式的动量方法.典型的有2016年Lessard等人提出的SNV(synthesized Nesterov variants)[11]、2018年Kidambi等人的AccSGD(accelerated SGD)[12]、Bryan等人的Triple动量方法[13]以及Cyrus等人提出的Robust动量方法[14]等等.
综上,无论是从理论分析还是从理解动量在优化算法中作用的角度来看,建立一个统一的动量方法的一般框架都是十分必要的.实际上,早在2013年,Sutskever等人就发现HB方法和NAG方法的区别仅仅在于计算梯度的点选取不同[15];通过引入中间变量,Yang等人于2016年提出了一种随机统一化动量方法(stochastic unified momentum, SUM),统一了SGD,HB和NAG[16];2019年Ma等人提出了QHM(quasi-hyperbolic momentum)方法,其迭代步骤可以表示成SGD与动量缓冲项的一种加权平均方式.QHM通过使用动量缓冲和加权SGD的2个折中参数将AccSGD,Triple,Robust等形式的动量方法进行统一[6].显然,SUM和QHM在统一化动量方法上的思路是不同的.
动量方法在有效提高SGD收敛性能的同时,也存在一些令人质疑的地方,即由于动量改变了SGD中梯度下降的操作,是否还能保持SGD原有的收敛性能?具体来说,对于非光滑凸问题,我们首先应该证明动量方法具有和SGD一样的最优平均收敛速率.但遗憾的是目前的研究还存在一些欠缺.特别地,对于非光滑凸目标函数,尽管SUM得到了最优的O(1t)平均收敛速率[16],但其使用的步长严重依赖预先设定的迭代步数,这种固定总迭代步数的方法在处理大规模数据时由于不能增量地执行算法而缺少实用性.另一方面,QHM虽然在实验中的性能超越了HB和NAG,但只讨论了光滑情况下的收敛性,也没有给出具体的收敛速率[6,17].除此以外,这些方法均只适用于无约束情况,不能用于解决机器学习中如稀疏学习导致的有约束问题.据我们所知,目前还没有文献涉及详细分析动量方法在有约束非光滑情况下的平均收敛性问题.
本文的贡献主要体现在3个方面:
1) 提出了一种含三参数的统一化动量方法TPUM(triple-parameters unified momentum),通过取不同的参数,能够同时包含SUM和QHM,是目前最一般的动量算法的统一框架.
2) 即使是对特例QHM,本文也给出约束非光滑情形的最优平均速率,而QHM目前只有光滑情形下的收敛性结论.即使是对特例SUM,本文也去掉了SUM原有收敛性中需要固定迭代步数和无约束等不合理限制.
3) 证明了所提出的TPUM方法在求解有约束非光滑凸优化问题时具有最优的平均收敛速率,并将其推广到随机情况,从而保证了添加动量不会影响标准梯度下降法的收敛性能以及动量方法对机器学习问题的可应用性.
1 TPUM方法
考虑优化问题:
minf(x), s.t.x∈Q,
(1)

批处理形式的投影次梯度方法的迭代步骤为

(2)
f(xt)-f(x*),
其中,t是总迭代次数,x*是最优解.平均输出收敛速率的数学表达式为
HB更新为
(3)
其中,αk≥0为步长,β∈[0,1)为动量xk-xk-1的系数.
NAG更新为

NAG等价于:
(5)

其中,s≥0为一常数,不同的s对应不同动量方法.
QHM更新如下:

其中,dk称为动量缓冲器.显然,QHM也是使用当前梯度与过去梯度的凸组合,但由于折中参数vk,βk的存在,破坏了更容易理解的动量项形式β(xk-xk-1),与SUM统一动量的出发点是不同的.
然而,通过对文献[17]的研究发现,动量缓冲器与动量项β(xk-xk-1)具有密切联系,可以推出-αβkdk-1=β(xk-xk-1).正是基于这种联系,受SUM统一思路的启发,本文增加2个折中参数δ1,δ2,将QHM和SUM进行统一,提出TPUM方法:

其中,步长αk>0,β∈[0,1)为动量系数,δ1,δ2∈[0,1]为折中参数.显然:
当δ1=0,s=0,δ2=1时,TPUM为HB;
当δ1=0,s=1,δ2=1时,TPUM为NAG;
当δ1=0,δ2=0时,TPUM为梯度下降法;
当δ1=1,s=0,δ2≠0,δ2≠1时,TPUM为QHM.
由此可见,TPUM是目前最一般的动量算法的统一框架.
2 TPUM方法平均收敛性分析
对于有约束问题(1),TPUM更新式(8)可以等价写成:

其中,P是Q上的投影算子.式(9)等价于:
(10)
在无约束情况下,文献[16]中定义:

一个直接的优势就是利用式(11)得到:

(12)
与已知的梯度优化方法十分相像[18],由式(12)出发很容易得到收敛性结论,也这正是SUM的主要证明思路.然而,这种方法仅对无约束有效,且使用的是固定步长,对于有约束情况的证明将十分困难.
为此,区别于式(11),修改动量项,得到:
pk=b(xk-xk-1),
其中,b为一个正常数,则
xk+pk=xk+b(xk-xk-1),
xk+1+pk+1=xk+1+b(xk+1-xk),
x-(xk+1+pk+1)=x-(b+1)xk+1+bxk,
x-(xk+pk)=x-(b+1)xk+bxk-1.
引理2[19].对于任意x∈RN,x0∈Q:
x-x0,y-x0≤0
当且仅当x0=P(x)时,对所有的y∈Q恒成立.
实际上,利用约束与投影的关系,与文献[18]类似,式(10)中的投影运算可以重新定义为一个优化问题:
引理3.式(10)等价于:

(13)
基于上述3条引理及假设1,可以得到:

对任意的x∈Q,s≥0,δ1≥0,则
具体证明见附录A.
通过重新定义的动量项和上述引理,利用凸函数的性质,Fenchel-Young不等式,可以得到:
且对任意t>0,

从定理1中可以看出:
1) TPUM是更为一般的统一化动量方法,在非光滑约束情况下可以得到最优的平均收敛速率,相比特殊情形的SUM与QHM,TPUM克服了固定步长及无约束的缺陷.
2) 如果使用固定的步长,TPUM将与SUM的证明一样简洁,并且同样可以得到最优收敛速率.
3) 文献[1]证明了在非光滑情形下HB型动量对SGD的个体收敛性具有加速作用,但其证明主要是针对无约束情形,且要求动量系数是时变的.本文虽然只是得到较弱的平均收敛性,但针对的是有约束问题且考虑的是更一般的统一化动量方法.
优化目标函数为
(16)
其中i为迭代到第t步时随机抽取的样本序号.
对于式(10),TPUM的随机形式迭代步骤为
(18)

算法1.随机TPUM算法.
输入:循环次数t;
输出:xt.
① 初始化x1=0,设定α1,δ1,δ2,s,b;
② Fork=1 tot;
④ 随机选取i∈{1,2,…,m};
⑥ 由式(17)计算xk+1;
⑦ End For
s≥0,δ1≥0,则存在一个正数M,使得
且对任意t>0,
3 实 验
3.1 实验目的
本节通过求解优化问题式(16),对随机TPUM式(17)平均收敛速率的理论分析结果进行实验验证.
主要实验目的有2方面:

2) 为了验证所提出的TPUM具有最优平均收敛速率,引入DA(dual averaging)算法[22]与TPUM框架下的SHB,SNAG和QHM进行对比,同时在6个数据集中各任取了一组超参数作为TPUM.DA是一种求解非光滑约束问题的经典一阶优化方法[22],具有最优的平均收敛速率,因此实验选取DA作为基准方法,其参数选择参照文献[22]的定理3.
3.2 实验数据集与方法
实验采用的是6个常用的标准数据集,这些数据集可以在LIBSVM(1)http://www.csie.ntu.edu.tw/~cjlin/libsvm/网站中找到,详细描述如表1所示:

Table 1 Description of Standard Datasets表1 标准数据库描述
为了进行公平地比较,所有的实验都在随机示例序列上重复计算了10次,取平均值作为最后结果,最大迭代次数均设定为10 000次.在实验中固定β=0.9,取δ1=0,δ2=1,s=0,s=1分别表示TPUM框架下的SHB与SNAG;δ1=1,δ2=0.5,s=0时为QHM.6个数据库中的TPUM参数选取如表1所示,分别标记为TPUM1至TPUM6,可以粗略地帮助我们看出3个参数的敏感性.
3.3 实验结论
图1为时变步长与固定步长对于收敛性影响的比较图,其中带有time-varying的曲线表示使用的是时变步长.实验验证,尽管固定步长在计算上为常数更为简单,但时变步长可以达到和固定步长几乎一致的最优收敛速率.而在实际的机器学习问题中,如果数据集样本发生变化,或者处理大规模数据时,使用时变步长的方法无疑更具有实用性.
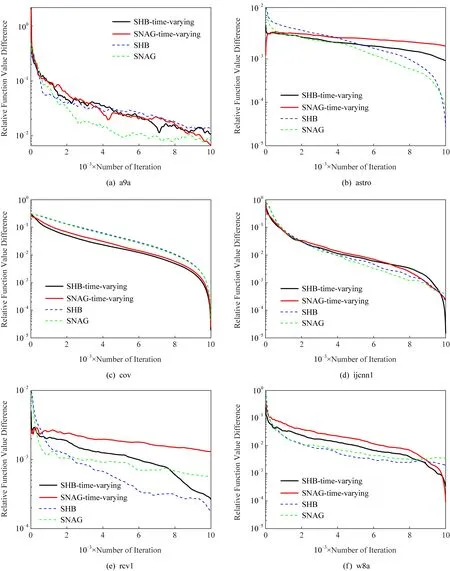
Fig. 1 Comparison of convergence rates with time-varying and constant step sizes图1 时变步长与固定步长收敛速率比较图
图2为所提TPUM收敛性比较图.如图所示,在有约束情况下,从添加不同超参数的TPUM曲线可以看出,整体的收敛趋势没有改变.与现有的DA方法相比,TPUM方法的几种变体,即SHB,SNAG和QHM与TPUM均有一致的收敛趋势,在迭代8 000步后,5种算法基本都能达到10-2的精度,这与本文的理论分析结果是吻合的,说明了TPUM具有最优平均收敛速率.
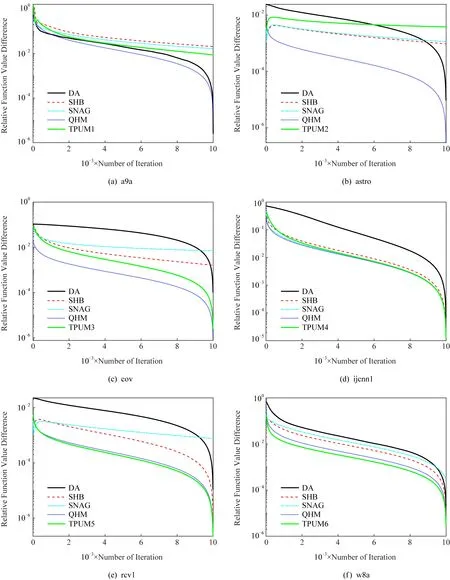
Fig. 2 Comparison of convergence rates图2 收敛速率比较图
4 结 论
本文提出了一种更一般的统一化动量方法TPUM,包括了目前典型的统一框架SUM和QHM.其次,证明了所提出的TPUM方法在约束情况下具有最优的平均收敛速率,从而保证了添加动量不会影响标准梯度下降法的收敛性能以及动量方法对机器学习问题的可应用性.
众所周知,相比于平均输出,个体输出具有更好的稀疏性,但个体收敛性较难获得.目前对于HB,NAG的个体收敛性已经有所突破[1-3].能否得到TPUM的个体收敛性结论显然值得考虑.另一方面,2015年Kingma等人提出一种Adam(adaptive moment estimation)方法,实际上是在HB基础上对步长的设置加以改进,以得到更好的收敛性能,目前在深度学习中被广泛使用[24],而QHM与Adam的结合也已经有所研究[6].将本文提出的TPUM与Adam结合,进一步提升动量方法在深度学习中的性能将是我们下一步的研究方向.
