基于自适应模糊PID的电动车手套控温保暖系统
2020-08-18张声岚甘礼福张烈平
张声岚,甘礼福,汪 雕,张烈平
(桂林理工大学 机械与控制工程学院,广西 桂林 541006)
保暖手套是人们在冬天驾驶电动车的重要辅助工具,能够有效地提高驾驶舒适性和避免驾驶过程中因手部过冷反应灵敏度下降导致的交通事故[1]。而传统电动车保暖手套臃肿、厚重,不利于驾驶,因此研究电加热恒温保暖手套,对提高驾驶电动车的安全性和舒适性具有重要意义[2]。
关于温度控制的方法较多,位式调节控制方法较为简单,但控制精度较差,温度控制波动幅值较大[3],无法对电动车手套的温度准确调节;神经网络控制方法较为复杂,对硬件运算能力要求较高,且成本较高,无法大规模普遍应用[4];传统PID控制方法的控制参数表现为静态,无法根据外界环境变化设置不同的控制参数,且容易超调,控制精度低,无法满足电动车行驶过程中手套温度自适应调节的需求[5]。
针对上述问题,本文提出了一种基于自适应模糊PID的电动车手套控温方法,对系统的误差、误差变化率和系统控制参数建立模糊关系,运用模糊推理动态调整系统的控制参数,以满足不同环境下系统精确调节温度对控制参数的要求,克服行驶速度、气温、风速等因素影响[6],设计并实现电动车手套的硬件与软件,通过实物验证本文设计的电动车手套温控系统。
1 系统硬件设计
硬件设计总体结构框图如图1所示。
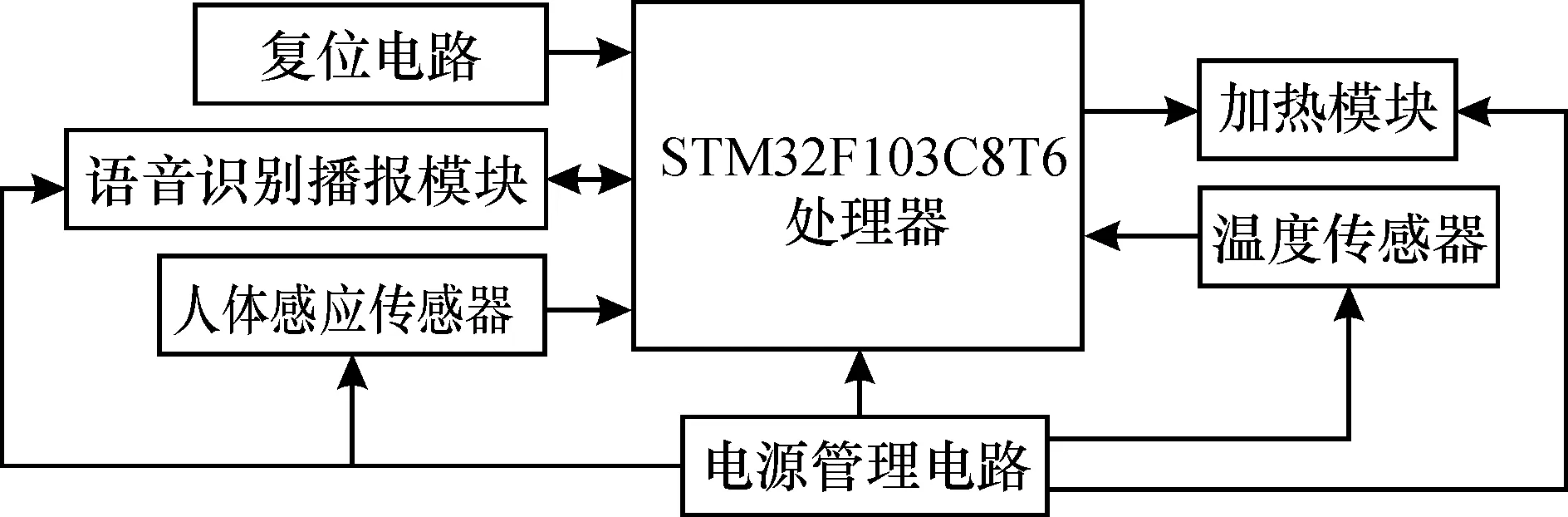
图1 系统整体硬件结构框图Fig.1 System diagram of overall hardware structure
本文设计的电动车手套控温系统具备自动感应穿戴、语音交互、循环充电使用以及自适应调节温度等基本功能。系统硬件电路通过保护壳体固定于手套表面,STM32F103C8T6处理器作为控制核心, 接收人体感应传感器发送的穿戴信息, 自动启动和关闭系统, 并通过语音识别播报模块与用户进行语音交互获取操作命令,完成调温、加热等操作。该设计主要是通过温度传感器检测的温度数据,对每个节点进行模糊PID计算和分析,调节PWM脉冲输出量,控制电加热碳纤维发热,实现自适应调节手套内部温度。系统中电源管理电路为系统的处理器、传感器模块以及加热碳纤维模块等提供额定工作电源,保证系统正常工作。
1.1 手套温度检测与加热电路设计
手套温度检测与加热电路如图2所示。
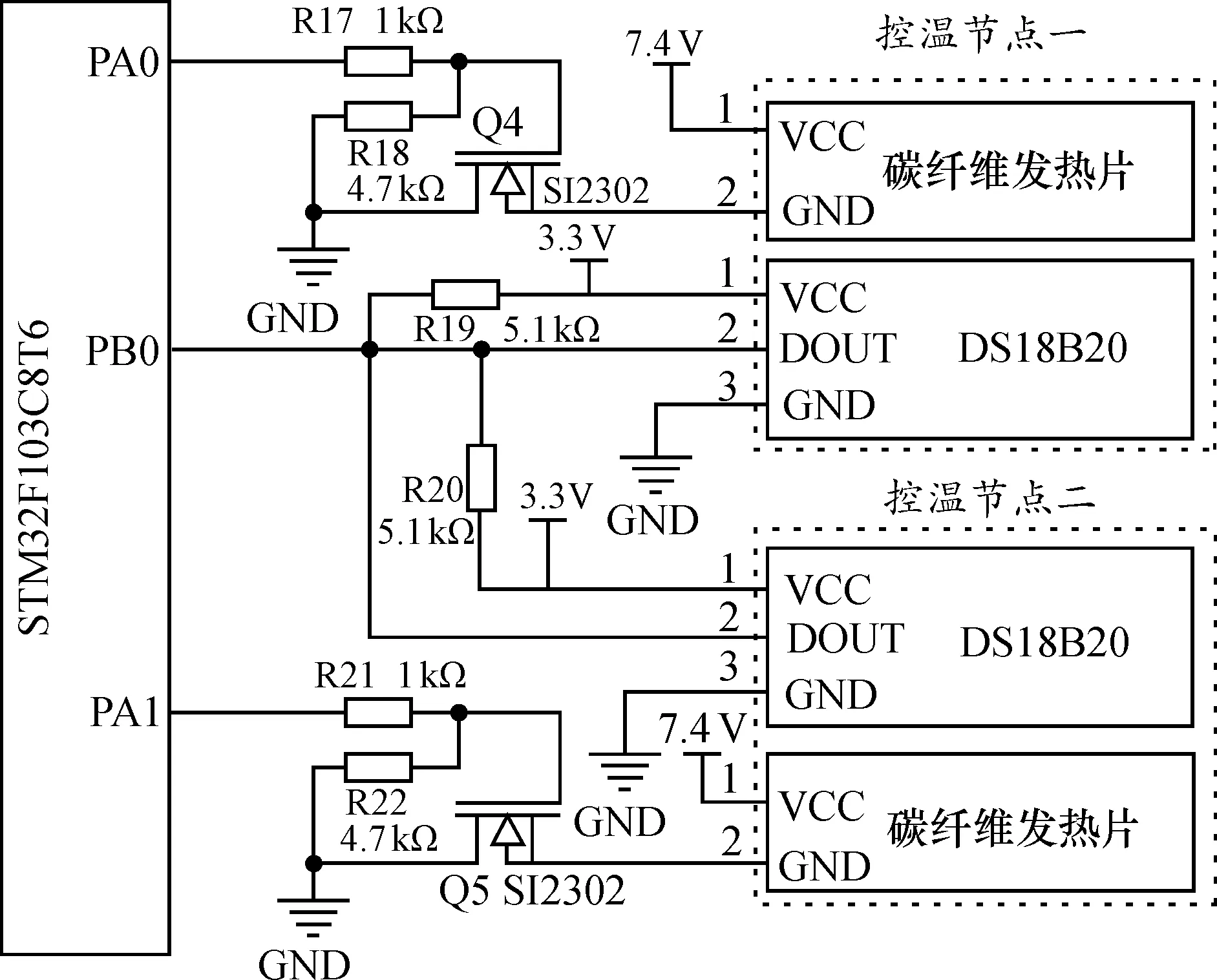
图2 手套温度检测与加热电路原理图Fig.2 Schematic diagram of temperature measurement and heating
手套固定于电动车把手, 通过手套上分别靠近手心和手背的面料夹层中的两个独立控温节点对手套内部均匀加热, 控温节点均包括DS18B20温度传感器和电加热碳纤维, 通过导线和外部电路连接。 DS18B20是单总线输出数字量的数字温度传感器, 具有多点组网功能,测量范围-55~125 ℃, 精度可达0.062 5 ℃[7]。 电加热碳纤维是一种导电发热材料, 具有升温迅速、 热转化效率高、 发热时产生远红外、 材质柔软、 对人体危害小等优点[8]。 将两个节点的DS18B20数据输出端口并联后与处理器PB0端口连接, 同时并联5.1 kΩ上拉电阻, 实现两个DS18B20并联组网测温, 稳定数据传送时序电平。 每个控温节点的电加热碳纤维和增强型MOS管漏极连接, 两个MOS管的控制端门极分别和处理器中定时器2的通道1和通道2端口连接, 实现通过PWM脉冲控制MOS管通断间接控制电加热碳纤维工作状态, 进而控制加热量,准确调温。
1.2 人体感应检测电路设计
人体感应检测电路采用HC-SR505人体检测传感器。HC-SR505是基于红外线计算的自动控制传感器,具有灵敏度高、体积小、低电压工作模式等优点。将HC-SR505安装于电动车手套内部,当穿戴手套时,HC-SR505的红外探头检测到人体辐射的红外信号,数据输出端口输出高电平;反之,当脱下手套时,输出低电平,将数据输出端口与处理器PB1端口连接,处理器通过检测PB1端口高低电平状态感应穿戴情况,进而根据穿戴情况自动控制系统的启动和关闭,使系统更加方便和节能,人体感应检测电路原理如图3所示。
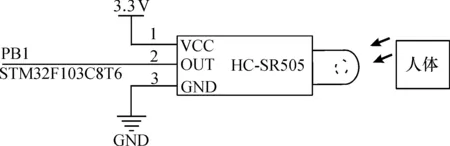
图3 穿戴感应电路原理图Fig.3 Schematic diagram of wearable induction circuit
1.3 语音交互电路设计
语音交互电路采用LD3320一体化语音识别播报模块进行语音交互电路设计。LD3320是ICRoute公司设计的一款集语音识别和播报功能于一体的语音交互芯片,该芯片采用了ICRoute公司特有识别优化算法,不用预先进行录音和训练就可识别语音,并且集成了模、数信号相互转换接口,具有独立的550 mW语音播报接口,轻松驱动喇叭播报,实现语音交互,便于单片机开发控制。将该模块与处理器SPI总线端口连接,处理器通过SPI总线发送控制指令进行语音文件的播报及接收语音识别信息,便于驾驶过程中语音交互快速设定和查询手套加热温度,提高手套的舒适性和行车安全性,语音交互电路如图4所示。
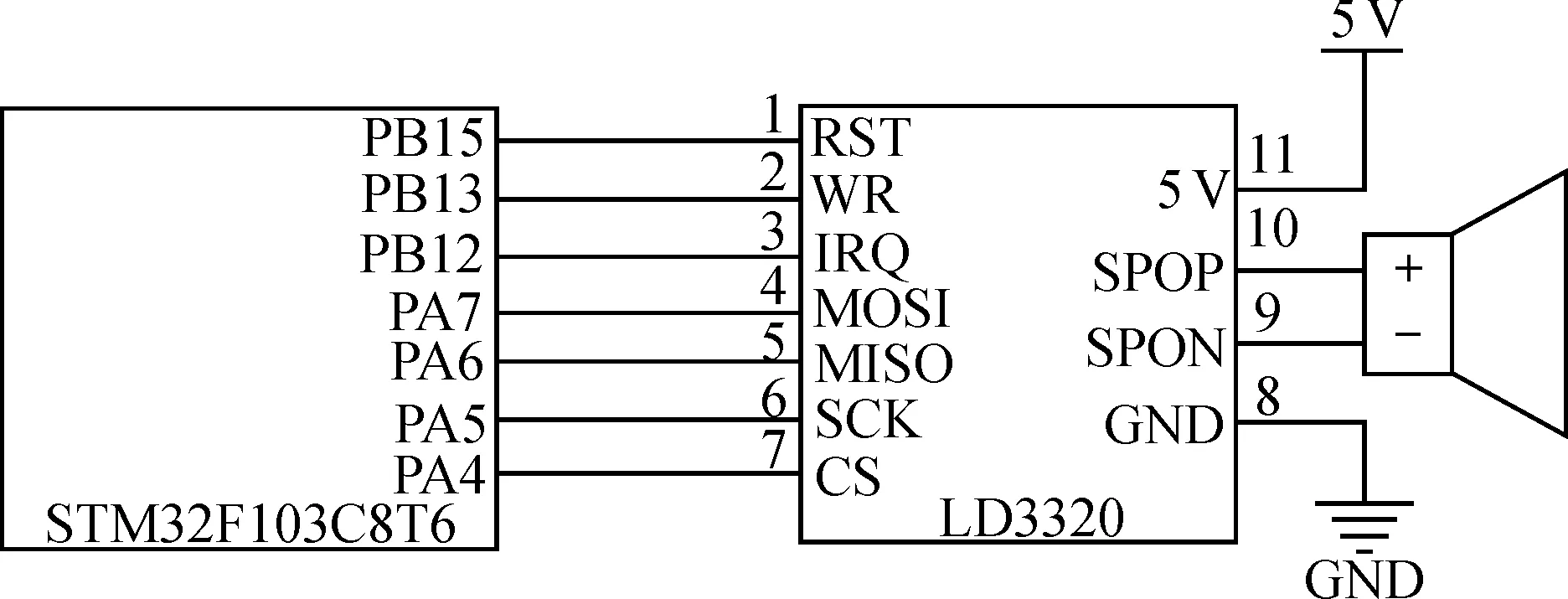
图4 语音交互电路原理图Fig.4 Schematic diagram of voice interaction circuit
1.4 电源管理电路设计
以串联的两颗3.7 V锂电池作为电源, 则电源的额定电压为7.4 V, 额定电流为1 A, 输出功率为7.4 W。电源管理电路包括充电电路和7.4 、5 及3.3 V供电电路,其中充电电路主要是通过SY6982C升压充电芯片得到充电电压,再经HY2213均衡充电芯片对每颗电池均衡充电,电池采用USB充电接口,实现可充电循环使用。手套正常工作电源由电池提供,经PL7022锂电池输出保护芯片后得到7.4 V供电电压,再由开关电源芯片和线性稳压芯片降压依次得到5和3.3 V供电电压,为手套的加热碳纤维以及各模块提供工作电压,维持正常运行,电路如图5所示。

图5 电源管理电路原理图Fig.5 Schematic diagrams of power management circuit
2 温度自适应模糊控制算法
手套在不同行驶速度、 外界温度、 风速等外界环境影响下, 系统的误差和误差变化率不同, 误差较大时应提高系统响应和反应速度, 误差和误差变化率都较小时应减少静态误差和提高系统稳定性[9]。 本系统引入基于自适模糊PID的智能控温保暖系统, 对不同环境下系统误差及误差变化率模糊推理动态调整系统控制参数, 以满足不同非线性因素影响下系统精确调节温度对控制参数的要求, 从而减少系统的调节时间和超调量, 达到最优控制效果,实现多环境下自适应地调节手套温度。
2.1 控制原理
手套温度自适应控制原理是将自适应模糊控制器和PID控制器相结合, 控制原理如图6所示。 系统开启后,PID控制器输出一定值, 手套温度上升, 手套上的温度传感器不断采集节点温度数据, 得到各节点设定温度和实际温度的误差和误差变化率, 模糊控制器根据得到的误差和误差变化率及时调整PID控制器中Kp、Ki、Kd的值,使得PID控制器能够自适应调节加热量,自动调节手套温度[10]。

图6 自适应模糊控制原理图Fig.6 Schematic diagram of adaptive fuzzy control
手套设定温度值r(k)与实际温度值y(k)之间的误差e(k)为
e(k)=r(k)-y(k)。
(1)
误差变化率ec(k)为当前时刻误差值与上一时刻误差之差:
ec(k)=e(k)-e(k-1)。
(2)
通过式(3)的比例、 积分、 微分控制规律对手套温度进行连续性调节, 使手套温度快速到达设定温度:
(3)
式中,u(t)为PID控制器输出量;e(t)为当前误差量;Kp为比例系数;Ti为积分时间常数;Td为微分时间常数。对式(3)进行离散化得到式(4), 便于单片机程序编程, 以及更好地消除稳态误差:
(4)
式中,u(k)为k时刻系统输出控制量;Ki为积分系数;Kd是微分系数。由式(4)递推得k-1时刻系统输出控制量为
Kd[e(k-1)-e(k-2)]。
(5)
式(4)和式(5)相减得到输出控制增量为
Δu(k)=Kp[e(k)-e(k-1)]+Kie(k)+
Kd[e(k)-2e(k-1)+e(k-2)]。
(6)
2.2 模糊控制器设计
本文设计的模糊控制器先通过隶属函数对手套温度设定值和实际值之间的误差以及误差变化率进行模糊化得到输入量,然后依据制定的模糊规则库对输入量推理出增量系数模糊值,反模糊化得到增量系数的确定值,最后通过增量系数调整系统控制参数。
2.2.1 模糊论域 手套温度系统中输入量为温度误差e及其变化率ec, 输出量为比例增量系数ΔKp、 积分增量系数ΔKi以及微分增量系数ΔKd。 根据误差e和误差变化率ec的实际变化范围, 并对系统温度控制进行综合分析后, 将输入量和输出量量化在[-6, 6], 得到模糊控制的论域均为{-6, -5, -4, -3, -2, -1, 0, 1, 2, 3, 4, 5, 6},以及模糊量子集{NB、 NM、 NS、 ZO、 PS、 PM、 PB}。
2.2.2 模糊化 将输入量通过隶属函数从基本量转化模糊量,隶属函数的类型关系到手套控温系统温度响应的稳定性和快速性。为保证系统稳定性和模糊推理准确性,同时又不影响系统控制的灵敏度,对输入变量采用较为集中和尖锐的三角函数,输出变量采用较为稀疏和平坦的高斯函数[11]。输入和输出变量隶属函数曲线如图7所示。
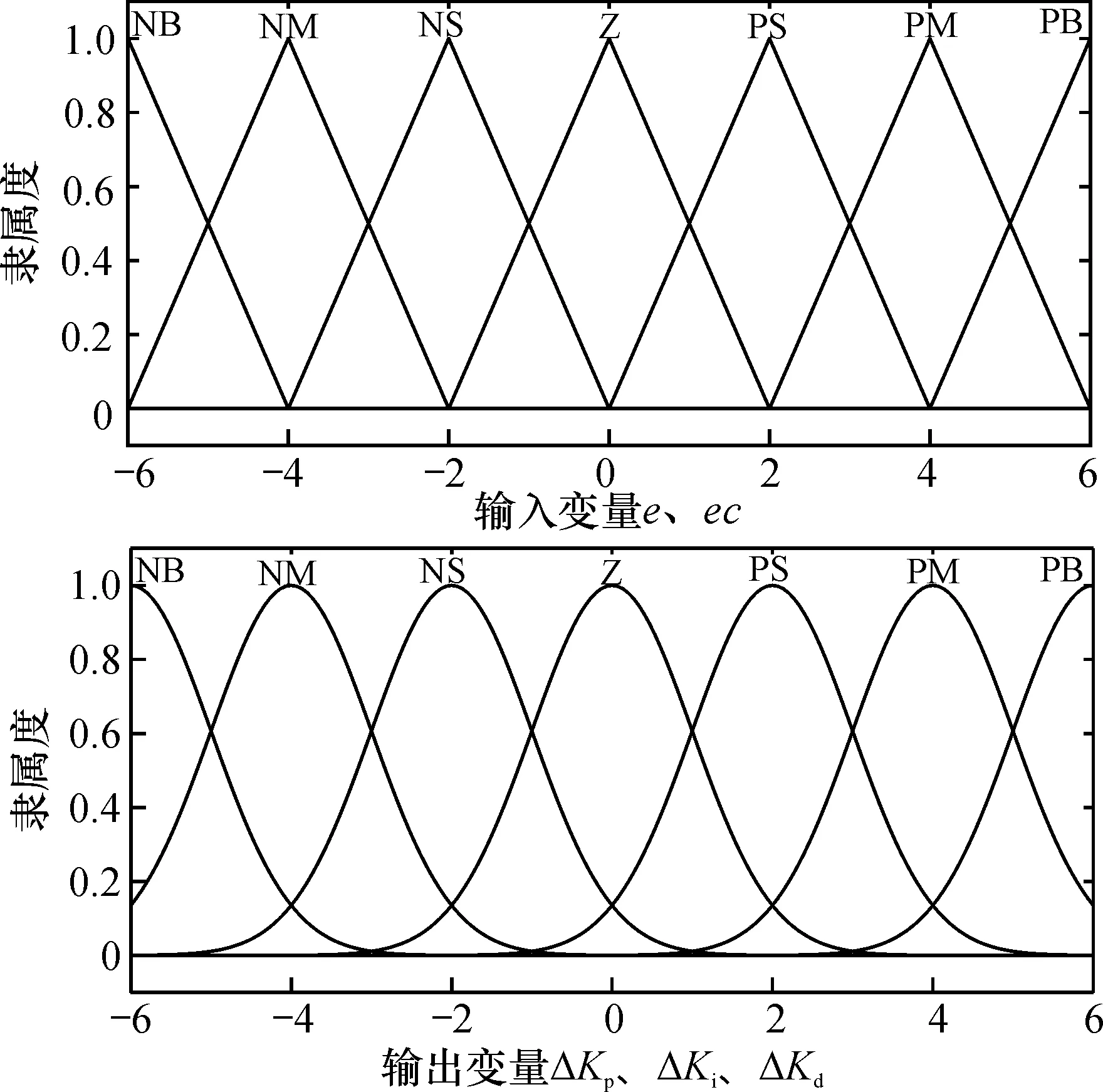
图7 隶属函数曲线Fig.7 Membership function curve
2.2.3 模糊规则与推理 本文设计系统的控制器参数规则见表1。 在系统运行中控制参数Kp、Ki、Kd的作用各不相同, 分别能够提高系统响应速度, 调节系统的稳态偏差, 改善系统的动态性能[12]。 基于PID控制参数的控制特性以及多次模拟电动车手套实际使用环境实验测试后发现:启动时,设定温度和实际温度的误差e较大,Kp应取较大的值使得手套能够快速升温,满足实际使用中的需求,同时Ki和Kd应取小些, 防止超调; 当手套温度趋近于设定温度时, 为消除稳态误差,Kp和Ki应取大些; 当外界环境变化较为明显时, 手套温度误差变化率ec较大,Kp和Kd宜取大些,Ki取小些, 以提高系统的动态响应, 抑制环境变化引起的干扰; 同理,当外界环境引起的误差e及其误差变化率ec为中等大小时, 为减少超调, 防止手套温度过高,Kp和Ki要取小些,Kd应取中等大小值。
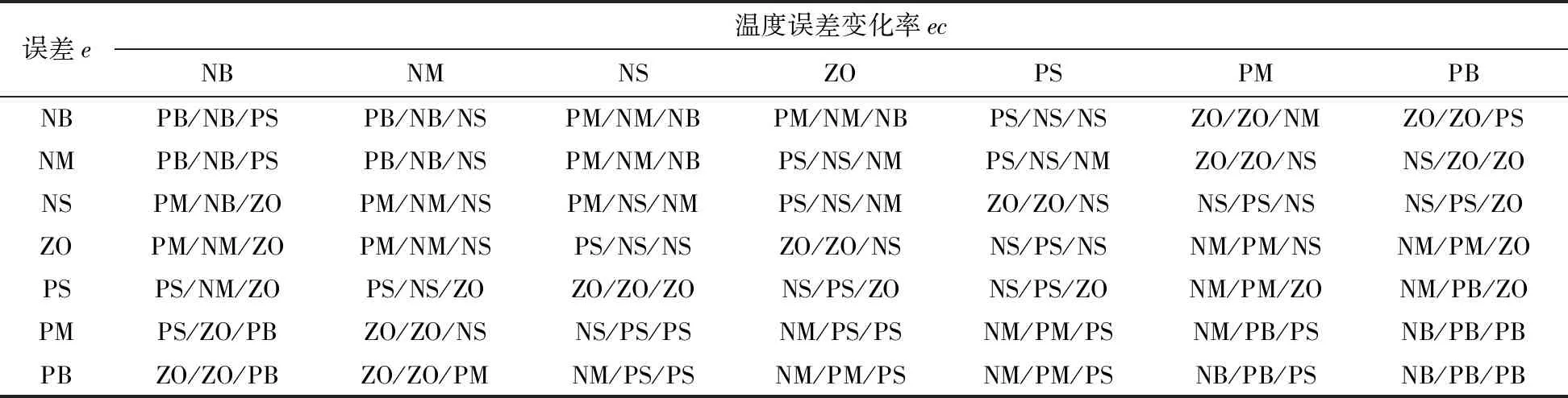
表1 模糊控制规则Table 1 Fuzzy control rules
2.2.4 解模糊 模糊控制器输出为模糊量,不能直接输出PID的控制参数,本设计采用重心法(加权平均法)对输出变量解模糊,得到PID控制参数增量系数ΔKp、 ΔKi、 ΔKd的确定值,再通过式(7)得到PID控制参数Kp、Ki、Kd的值,完成对PID控制器参数自适应调整,实现有效自适应控制手套温度,防止超调。
(7)
式中:Kp0、Ki0、Kd0是PID控制器初始值;Kp、Ki、Kd是调整后的控制参数。
3 系统软件设计
3.1 单片机主程序设计
系统控制程序由主程序、6个单片机初始化子程序、3个传感器初始化子程序以及6个功能子程序组成。其中6个单片机初始化子程序分别是单片机时钟初始化子程序、单片机I/O端口初始化子程序、单片机中断初始化子程序、单片机定时器初始化程序、单片机串口初始化子程序、PWM脉冲初始化子程序;3个传感器初始化子程序分别是DS18B20初始化子程序、HC-SR505初始化子程序、LD3320初始化子程序;6个功能子程序分别是人体感应检测子程序、语音识别子程序、语音播报子程序、中断服务子程序、延时子程序、模糊PID计算子程序。编程语言为C语言,通过Keil uVision5完成程序编写和编译,并使用J-Link进行程序下载和仿真调试,完成对电动车手套智能控温保暖系统的总体软件设计和开发,主程序流程如图8所示。

图8 主程序流程图Fig.8 Flow chart of master program
3.2 自适应模糊PID程序设计
自适应模糊PID程序流程如图9所示。通过定时器中断服务函数对每个控温节点周期性计算自适应模糊PID,调整与更新每个节点的控制参数以及PWM输出值。程序采用指针结构体对各部分的模糊PID运算结果进行保存、 传递以及更新, 拟指针访问传递的是地址,可以减少运算时间,加快运行速度与效率。

图9 自适应模糊PID程序流程图Fig.9 Flow chart of adaptive fuzzy PID program
4 实验与分析
4.1 实验过程
自适应模糊PID电动车手套控温保暖系统的实物如图10所示。通过空调调节风速以及温度模电动车手套在冬天的使用情况,测试在不同温度、风速环境下手套的控温保暖效果,验证系统的有效性。测试由4人(A、 B、 C、 D)进行, 其中,A(实验员A)负责穿戴传统PID控温系统手套, B(实验员B)负责穿戴自适应模糊PID控温系统手套,C负责调节空调送风速及温度, D负责记录手套温度以及模糊PID控制参数Kp、Ki、Kd数据的变化情况。 两只手套除控制算法不同外,其余部分全部相同,穿戴手套的两名实验员将手套伸向空调送风口位置进行测试。

图10 自适应模糊PID电动车手套控温保暖系统实物Fig.10 Electric vehicle gloves of temperature control and warming system based on adaptive fuzzy PID
对手套温控保暖系统的响应性能进行测试, 当前手套内部温度为12 ℃, 实验员通过语音设置手套温度为19 ℃, 设置完成后启动系统, 测试并对比传统PID控制系统和本文设计的控制系统的阶跃响应情况。 保持手套设定温度19 ℃不变, 通过调节空调送风速度和温度, 改变外界干扰环境, 测试不同环境下手套控温效果并记录数据。
4.2 实验结果分析
传统PID控制系统和本文设计的控制系统的阶跃响应曲线如图11所示。 传统PID控制调节时间和超调量较大, 分别为173 s和21.4%,而自适应模糊PID控制的调节时间为82 s,超调量为4.2%。由此可得,模糊自适应PID控制优于传统PID控制,表明了该系统能够有效避免超调对手套佩戴舒适度的影响。
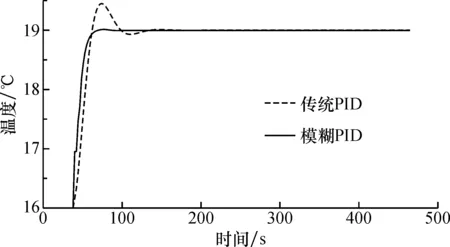
图11 不同算法下系统响应曲线Fig.11 System response curves of different algorithms
在不同测试环境下手套温度变化具体数据如表2所示。 对比两种手套的测试数据可以发现, 自适应模糊PID的控制响应速度快、 调节精度高、 超调量少、 系统调节效果优于传统的PID控制。 且在穿戴体验上, 在长达1 h的测试过程中, 实验员B反映在整个测试过程手套温度舒适, 没有出现过冷过热的情况, 手部也未曾出现出汗情况, 而实验员A反映在空调调节变化较为明显时, 手套温度跳变剧烈, 容易过热,测试过程中手部出汗。

表2 不同算法和测试条件下温度测试数据Table 2 Temperature test data of different algorithm and condition
综上所述, 本文设计的电动车智能控温保暖能够抑制外界变化对控温系统的干扰, 使电动车手套具有更好的穿戴舒适感。
5 结 论
本文设计的基于自适应模糊PID电动车手套控温保暖系统,感应到外界环境变化时,根据误差和误差变化率的变化,能够及时自动调整PID参数,使系统迅速达到设定值并维持稳定,给穿戴用户提供良好的舒适感;硬件上采用了人体检测传感器作为系统感应开关,能够根据人们的穿戴情况自动切换系统工作状态,降低系统的功耗,并且采用语音交互模块进行人机交互,极大地方便在驾驶过程中快速设定手套参数。综上所述,基于自适应模糊PID电动车手套智能控温保暖系统使用效果好,为电动车手套温度的准确控制提供了可行的解决方案。
