助航灯具光强近场检测系统研究
2020-08-11尚美琪
尚美琪
(中国民航大学,天津300300)
机场目视助航系统是机场的重要设施,灯具光度学参数的合格性是影响飞行员在飞机着陆时判断其方位和姿态的重要因素[1-3]。光度分布的测量方法分为远场测量方法和近场测量方法。远场测量的方法要求光源与探测器之间的距离约等于光源最大尺寸的5 倍。
但当近场测量灯具光度时,其出光特性会与理想的点光源或均匀的面光源的测量结果产生大幅度偏离[4-5]。
本文设计的助航灯具光强近场检测系统,采用转台旋转被测灯具,水平方向-13°~13°、垂直方向0°~15°范围内采集照度数据,检测系统与光学系统相结合,改变光的传播方向,使探测器只检测得到光源发出的0.1°立体角的光。运用光度学、数值分析等理论通过计算机完成数据的处理工作,得到等光强曲线图。通过对等光强曲线图进行分析,进而判断灯具是否合格。
1 检测系统硬件组成
1.1检测系统结构
整个检测系统由光学系统、光电探测器、显示器、摇篮式两轴转台、步进电机、PC 机等组成。PC 机控制整个系统发出所有指令控制步进电机带动两轴转台的转动,以及照度信号的同步采集。最后将系统采集到的光源照度数据送至PC 机进行数据处理。系统利用双远心结构的透镜组组成光学系统,将测量范围内的光束投射到检测面上,照度传感器组网阵列同时采集到一组照度数据,通过步进电机的驱动控制转台以标准角度转动,从而实现光强的二维检测。该系统选用Z-10 型智能照度计,具有多照度传感器组网成多点测量的功能。该照度计由照度传感器和模拟信号调理器组成,模拟信号调理器可连接9 路配套照度传感器进行照度数据的采集和处理,通过USB通讯接口完成向上位机实时高速的传输照度数据,最后利用MATLAB 软件绘制被测灯具的等光强曲线。
1.2 光学系统结构
系统采用双远心结构的透镜组以满足近距离检测助航灯具光强的测量标准。通过在光学系统的中间位置放置孔径光阑,使主光线一定通过孔径中心点,使得物体侧和成像侧的主光线一定平行于光轴进入镜头[6]。为保证像面入射光线垂直于像面,设计整个光学系统的放大倍率为1:1,光源的发光角度为0.1°,工作距离为150mm,灯具发光面积为40×20mm,光学系统的初始结构如图1 所示。

图1 初始结构图
前两组正透镜采用冕牌玻璃PSK52 和N-PSK53,第三组透镜采用火石玻璃TIF6,通过阿贝数的不同有效补偿色差[7-9]。图2为优化后的点列图,可以看出艾利斑半径为11.95μm,各视场均方根弥散斑半径最大为0.798μm,小于艾利斑半径。从点列图上看全视场弥散斑小于或者接近艾利斑半径,成像质量良好。

图2 优化后点列图
2 光强值的计算
系统通过光学系统将发光角度为0.1°的光束经1:1 放大倍率平行入射探测面(光源的发光面积为20X40mm),在探测面按照3×3 阵列布置照度传感器以求得探测面的平均照度。则探测面光通量Φ'与采集到的照度值E 关系为

式中W 为光源的宽20mm,H 为光源的高40mm,Ei为各点的照度值,E0为测试背景照度值。则照度传感器采集到的照度值Ei(i=1,2,…,9)与灯具在发光角度为θ 时的光强值I 的关系式为

式中K 为光学仿真系统的透射率,ρ 为反射率。∑d 是各光学零件沿光轴的厚度之和,θ 为光源的发光角度0.1°。
3 数据处理
绘制等光强曲线采用的绘制方法主要有2 种,分别是三角网格法以及矩形网格法。矩形网格法更简单,但在拟合边界效果上存在较大的劣势,易出现等值线断续以及原始数据出现失真等现象。
因此采用三角网格法绘制等值线能够获得准确性更高的等光强曲线,同时更充分的还原原始数据。针对如何提高算法在处理大量数据时的效率问题,提出了一种改进的格网划分Delaunay 三角网生成算法。但用此算法绘制出来的曲线存在不平滑的问题,需采用三次B 样条进行曲线平滑处理[10]。
3.1 等值线的绘制算法
基于系统提出的改进的Delaunay 三角网格生成方法,首先判断三角形各边上是否有等值点,在有等值点的边通过线性内插求出等值点坐标,等值点跟踪、连接,最后生成等值线。设三角形三个顶点分别为A(x1,y1)、B(x2,y2)、C(x3,y3)。计算等值点坐标
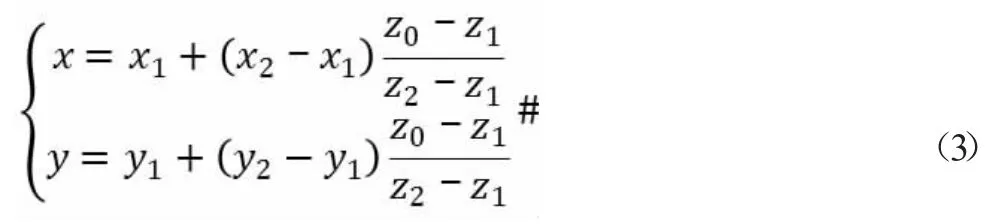
式中,z0为等值点的特征值,其中(x,y)即为所求等值点的坐标。
3.2B 样条曲线平滑数学模型
针对折线不够平滑的问题采用B 样条曲线处理方法,该方法通过对相邻k+1 个点建立k 次B 样条基函数,通过局部逼近处理,从而获取到若干条经平滑处理后的B 样条曲线。
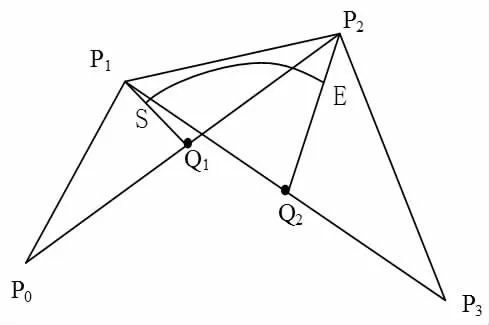
图3 三次B 样条曲线拟合示意图
本文采用三次B 样条曲线进行等值线平滑处理,即k=3,如图3 所示,对相邻的4 个点P0、P1、P2、P3构造一个三次B 样条曲线,设中点Q1=(P0+P2)/2、Q2=(P1+P3)/2。S 点位于△P0P1P2中线P1Q1上距离P1点P1Q1/3 处,切线平行于P0P2;E 点位于△P1P2P3的中线P2Q2上距离P2点P2Q2/3 处,切线平行于P1P2;拟合曲线以平均通过的方式经过控制点。
具体矩阵表达式为:
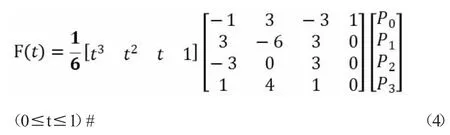
分量式为:

假定等值线追踪结果有n 个平面离散点,记为Pi(i=0,1,…,n-1)。以P0、P1、P2、P3绘制第一条拟合曲线;再通过P1、P2、P3、P4绘制第二条拟合曲线;以此类推,以Pn-4、Pn-3、Pn-2、Pn-1绘制第三条拟合曲线。用此方法绘制的曲线自然衔接,具有C2级连续性。
4 测试结果分析
国际民用航空公约附件14 中对助航灯具的中心光强、次光强、最弱光强范围均有明确的量化要求,并列出了各类助航灯具的等光强曲线,根据Delaunay 三角剖分算法绘制等光强曲线图,然后根据与实际等光强图作对比可以判断本文设计的助航灯具光强近场检测系统是否达到了现场检测要求。(试验以标准的跑道中线灯为例)参考标准的等光强图和基于Delaunay 三角剖分算法绘制的光源等光强曲线如图4 所示。
从光源的空间光强分布测试结果可以看出,检测系统的设计满足现场测量要求。
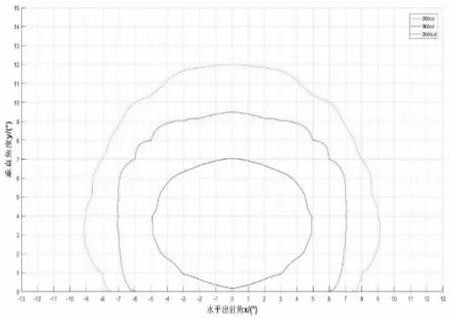
图4 空间光强分布测试结果
5 结论
通过对助航灯具光源发光特性的分析,提出了一种光强近场检测系统,改变光的传播方向实现近场检测的同时满足ICAO 的检测标准,同时利用Delaunay 三角剖分算法绘制助航灯具的等光强曲线,与实际等光强图作对比可以得出,检测系统的设计满足现场测量要求。
