基于IAP15F2K61智能循迹灭火系统的设计
2020-08-07赵玲峰张俊翔许潮
赵玲峰 张俊翔 许潮

摘 要: 为了提高仓库、商场等固定场所的防火能力,智能循迹灭火车是消防系统不可缺少的助手,很大程度上减小了人力的投入。当其发现有地方着火时会对火源进行扑灭,文中设计分为硬件电路设计和软件设计,以IAP15F2K61芯片为核心,控制电路实现循迹、探测火源和灭火的功能,使用3路3线电路设计作为火源探测器,提高了探测面和抗干扰能力,具有结构简单、实用性强、设计成本低等特点。
关键词: 循迹; 智能灭火; IAP15F2K61; 火源探测; 路线探测; 抗干扰
中图分类号: TN02?34 文献标识码: A 文章编号: 1004?373X(2020)13?0147?03
Design of intelligent tracking fire fighting system based on IAP15F2K61
ZHAO Lingfeng, ZHANG Junxiang, XU Chao
(Guangxi University Xingjian College of Science and Liberal Arts, Nanning 530005, China)
Abstract: The intelligent tracking fire fighting vehicle is taken as an indispensable assistant of fire prevention system to improve the fire prevention of permanent places like warehouses and shopping malls, which greatly reduces the manpower input. The vehicle will extinguish the fire by finding out the fire source when it finds a place being on fire. The proposed system is achieved by hardware circuit design and software design. Taking IAP15F2K61 chip as the core, the control circuit realizes the functions of tracing, detecting fire source and extinguishing fire. The detection surface and anti?interference ability are improved by taking 3?way 3?wire circuit design as the fire source detector, which has the characteristics of simple structure, excellent practicability and low design cost.
Keywords: tracking; intelligent fire fighting; IAP15F2K61; fire source detection; route detection; anti?interference
0 引 言
火灾事故具有不可预知性,预防火灾是治理火灾的最有效前提。当火灾发生时,消防员冒着极大的风险近距离作战,迅速扑灭火源。随着科技的不断创新与发展,国内外对小型智能系统的应用越来越广泛,种类也越来越多,如智能扫地机器人、智能厨房机器人等运用逐渐普及[1]。消防安全的智能化也越来越受到人们的关注和重视,消防机器人可在高温、强热、浓烟等危险环境下作业,可以代替消防人员承担一部分危险工作,避免人员伤亡。
关于智能消防机器人的设计与应用,最早在美国和日本开展这方面的研究,目前已有多种不同功能的消防机器人用于救灾现场[2]。本文设计的是一款以单片机为主控芯片,易操作、成本低的智能循迹消防小车,能自动循迹的智能灭火机器人可以昼夜巡逻,具有探测火源、自动循迹、灭火等功能,多应用于储物仓库等固定场所,按路线巡逻定点搜寻火源,起到了预防火灾发生的作用,在灾情发生时能及时处理,提高消防安全的智能化。
1 系统总体设计
1.1 系统总体框图
本系统总体设计由道路探测模块、火源探测模块、车模、动力驱动模块及灭火模块五部分组成[3]。主控模块单片机会自动發出两个主要指令,分别控制小车驱动模块单元执行小车前行状态和控制风扇的转动进行灭火工作[4],主控模块会不断地对道路探测模块进行数据采集,当不同位置的探测器探测到黑线时,主控模块会按照设定的程序对L298驱动模块发送相应的信号来改变两个车轮的动作,从而改变行驶路线,使得小车可以以最快的速度过弯,如图1所示。
1.2 总体方案设计
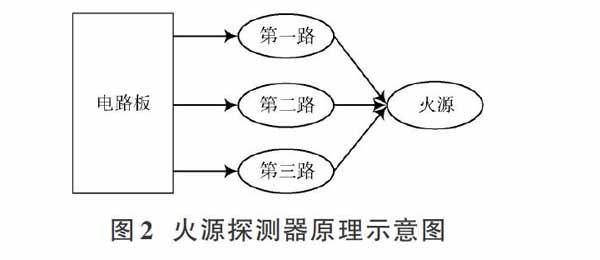
设计的总体思路是以IAP15F2K61为主控芯片,利用红外传感器进行火源探测,用L298控制车体左右两个直流电机并接收单片机的指令,控制模型车的前进、倒退、转弯,当红外传感器感应到火源时,单片机驱动灭火器对火源进行扑灭[5]。主控芯片IAP15F2K61会定时地对火源探测器和道路探测模块进行数据采集。火源探测器的设计有三路:第一路是探测右前方;第二路是探测正前方;第三路是探测左前方。每一路采用3个上下不同方向的红外接收二极管采集数据,第一个为下方,第二为水平方向,第三个为第一和第二个的中间位置。当三路探测器同时采集到火源信号时才会确认存在火源,提高了火源探测的抗干扰能力,火源探测原理示意图如图2所示。
路线探测模块采用红外线的收发来识别路线,采用黑色跑道能使路线探测模块有效识别路线[6]。设计中选用的IAP15F2K61单片机是一款低功率、性能强大、抗干扰能力强、实用性高的51单片机。采用L298电路作为驱动电路,稳定性能高,且可以为主控电路模块提供5 V电压。
2 硬件电路设计
2.1 火源探测器的设计
火可以发出很强的红外线,只要在一定的范围内可用红外线的强度来判断火源的位置。设计采用了多个红外线接收二级管,为了增强抗干扰能力和提高探测范围,采用三路红外线探测,每一路的红外探测又增加了三线,构成了“三路三线”的线路设计,大大提高了抗干扰能力和探测范围[7]。
2.2 电机驱动模块设计
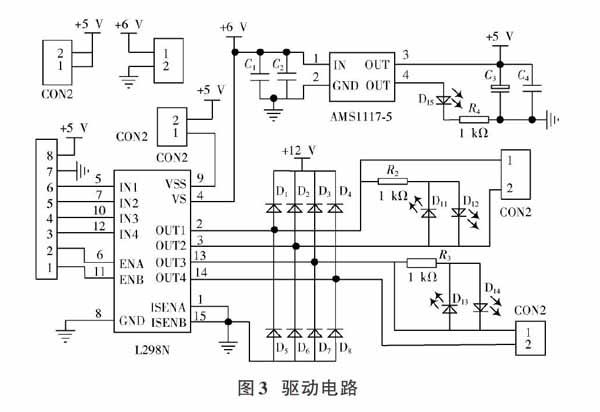
本设计采用L298芯片驱动左右两个直流电机,实现匀速前行、转向、停止等设定动作,完成巡逻的目的。L298芯片作为一种能够高效率驱动强大功率电机的单元电路。能够实现46 V电压峰值,3 A瞬时峰值电流,2 A持续工作电流。小车驱动电路是由L298芯片和AMS1117?5稳压芯片组成,L298的逻辑输入端IN1和IN2口分别接主控芯片的P2.0和P2.1;IN3口和IN4端口分别与P2.2与P2.3相连;ENABLE脚是使能端,当插上跳线帽,为使能驱动;电路电机控制端 OUT4口和OUT3口都是控制左电机状态;OUT2口和OUT1口控制右电机转动[8]。电机接收L298处理过的信号电流,电机相应转动,驱动电路如图3所示。
2.3 路线探测模块
本设计中小车按照给定的路线搜寻火源,采用红外线收发寻找路线,当红外线照射到黑色物体上面时,黑色物体会把红外线全部吸收,而颜色逐渐偏白色时,物体对红外线的吸收能力逐渐减弱[9],反射能力逐渐增强,为了加强探测能力,采用四路探测和LM339电压比较器。检测电路如图4所示。
3 软件设计
软件设计实现道路的探测、火源的探测和灭火动作这三个功能,程序设计包括主程序、延时子程序、驱动子程序、道路探测子程序、定时器中断子程序、火源探测子程序以及灭火程序[10]。主程序通过实现位地址、变量、溢出位等进行初始化、驱动条件执行以及部分子程序的调用;中断子程序提供PWM波形给驱动,使驱动电机可以按照不同的速度前进或倒退,当火源探测程序有溢出则立即停止前进,然后轉入灭火程序,灭火程序结束后再查看火源探测程序还有无溢出,当没有溢出,则进入道路探测程序继续前进,如果还有溢出则继续执行灭火程序。程序流程图如图5所示。
4 系统调试结果
系统调试包括硬件调试和软件调试两部分。根据实验证明,距离探测器有较好的抗干扰能力,探测范围可调,但探测精度有待提高。路线探测模块增加了一个电压比较器,实现了灵敏度可调,在不同的环境下可以使用不同的灵敏度。功能测试方面,小车可向左右两个方向转大弯和小弯,探测到火源可自行停下并实施灭火,基本实现了智能循迹灭火的功能。实物图如图6所示。
5 结 语
本文以IAP15F2K61单片机为核心部件,制作智能循迹灭火车。在循迹方面由红外线传感器进行数据的采集,红外线传感器与单片机之间的通信方式为4路并行传输方式,可以快速地传送离线数据,大大提高了系统的可行性、可靠性和稳定性。在设计过程中,设计硬件电路简单,实用性强、设计成本低,避免环境因素干扰,充分利用软件编程,避免测量引起的误差,但在探测范围和探测精度方面的设计上还有待进一步提高和完善。
注:本文通讯作者为张俊翔。
参考文献
[1] 戴镇原,冯齐全,王愉博.关于智能灭火机器人系统优化设计的探讨[J].数字通信世界,2017(8):130.
[2] 张铮,张江宁,薛竹村,等.循迹避障灭火功能智能小车设计[J].实验室研究与探索,2016,35(11):141?145.
[3] 朱贵宪.基于STC89C52单片机控制的智能灭火系统设计[J].电脑知识与技术(学术交流),2017,13(16):211?212.
[4] 张云亮,赵玫,杨洪勇,等.光电导航智能避障灭火系统的设计[J].自动化与信息工程,2017,38(4):21?25.
[5] 李焕宏,汤立清,凌文祥.智能管网式干粉灭火系统[J].消防科学与技术,2018,37(1):53?54.
[6] 陈志谦,王毅.全视场人工智能火灾探测系统分析[J].消防科学与技术,2017,36(10):1409?1411.
[7] 孙磊,邵高耸,张庆利.消防智能可穿戴系统设计及应用研究[J].消防科学与技术,2017,36(5):669?671.
[8] 高青峰.火灾自动报警系统设计探讨[J].智能建筑电气技术,2017,11(5):44?46.
[9] 万兵,汪地,史烨桦.基于STM32F103控制器的智能循迹小车系统设计[J].工业控制计算机,2018,31(6):137?139.
[10] 林勇,秦文静,戚国庆.基于机载视觉引导的无人机自主循迹研究[J].电子设计工程,2018,26(8):21?24.
