一种基于激光三维成像雷达距离像的目标检测方法
2020-08-07黄明晶王雪梅孟伟杰马蒙蒙
黄明晶,蹇 渊,王雪梅,孟伟杰,马蒙蒙
(西南技术物理研究所,四川 成都 610047)
1 引 言
地面目标检测是空地探测、精确打击领域及自动目标识别技术中的重要研究内容。激光三维成像雷达的波束较窄、方向性好,其获取的三维距离像反映了目标最本质的尺寸信息,能够充分利用先验信息,是地面场景下检测目标的有效手段,也是其突出的优势[1-3]。
随着激光探测技术的不断发展,近年来激光三维成像雷达地面目标检测技术受到大量学者的关注。目前对激光三维成像雷达地面目标检测主要有两类:一类是直接估算激光三维雷达点云几何属性,根据不同目标点云特征差异来实现对点云目标的检测[4-5],这类方法通常计算量较大且几何属性估算的准确性直接影响了目标提取结果的准确性;一类是将三维点云映射到二维坐标中生成距离像,利用传统二维图像中的目标检测技术来提取目标[6-7],这类方法是根据距离像的伪灰度变化信息,利用边缘检测和图像分割算法提取目标的轮廓,但对表面曲率不连续的目标检测不到边缘点,无法得到有效轮廓信息且后续无法弥补。
本文根据激光三维成像雷达获取的地面目标距离像的特点,提出了一种基于激光三维成像雷达距离像的目标检测方法,实现了对地面坦克目标的准确提取,该方法对坦克目标的检测效果较好,且运算量较小可以满足实时性的要求。
2 距离像预处理
为了抑制激光三维成像雷达距离像出现的距离反常噪声现象,同时又较好地保护目标细节信息[8],本文采用基于邻域像素内检测距离反常来对距离像进行降噪处理。根据检测目标的大小设置一个距离判断阈值T,统计当前像素与其邻域内的其他像素距离差在T内的数量N,设置数量判断与之TN,通过这个数量来判断其是否为距离反常像素。具体算法步骤如下:
1)设置T和TN5=5,在5×5邻域内对当前像素进行检测,得到在距离判断阈值T范围内的数量N5。
(1)

2)比较当前像素数量,判断是否为距离反常像素。
(2)
3)若Pi,j是正常像素,则保持原值不变,处理下一个像素;若是距离反常像素,则在7×7邻域内对当前像素进行阈值检测,统计在阈值范围内的邻域像素数量,然后转至4)。
Pi,j=
(3)
4)设置TN7=7,对7×7邻域内像素的检测结果进行判断。
(4)
5)若Pi,j是正常像素,则保持原值不变;若是距离反常像素,则在9×9邻域内对当前像素进行阈值检测,统计在阈值范围内的邻域像素数量,然后转至6)。
Pi,j=
(5)
6)设置TN9=9,对9×9邻域内像素的检测结果进行判断。
(6)
7)若Pi,j为正常像素时,保持原值不变,处理下一个像素;当Pi,j为距离反常像素时,取其9×9邻域内的中值代替当前像素。
(7)
其中,median(·)为取中值运算。
3 距离像目标检测
3.1 基于形态学的地面估计和高程分割
形态学图像处理是图像处理技术中一项有力的工具,基本的二值形态学运算有以下四种:腐蚀、膨胀、开运算、闭运算。腐蚀和膨胀运算是在结构元素定义的邻域内选择图像像素值和结构元素作用后的最小或最大像素值。开运算和闭运算实际上是腐蚀和膨胀操作非常简单的组合,开运算一般使对象的轮廓变得光滑,断开狭窄的间断和消除细的突出物,开运算最明显的效果是消除大于邻域内点的孤立异常值;闭运算同样使轮廓线更为光滑,但与开运算相反的是,它通常消弥狭窄的间断和长细的鸿沟,消除小的空洞,并填补轮廓线中的断裂,闭运算最明显的效果是消除值小于邻域内的点的孤立异常值[9]。
下面以图1中的坦克目标为例,对基于形态学的DEM估计和高程分割的步骤进行分析,坦克目标的激光三维成像雷达距离像如图1所示。
1)根据坦克目标在距离像上的投影,选取合适的结构元素窗口大小,对图1的距离像I1做地面估计运算得到地面图像I2如图2所示。

图1 激光三维成像雷达距离像

图2 提取的地面图像
2)将原距离像I1和地面图I2进行差值运算并绝对值,得到差值图I3如图3所示。

图3 距离像与地面差值后的差值图
I3(i,j)=|I1(i,j)-I2(i,j)|
(8)
3)设置高程阈值T1和T2,对差值图I3进行分割得到分割后的高程图I4如图4所示,对比图3能够容易的发现图4中地面上的大量线状部分已被去除。为了进一步获得较为精确的坦克目标,我们在下一节中对图4中的坦克目标进行检测处理。
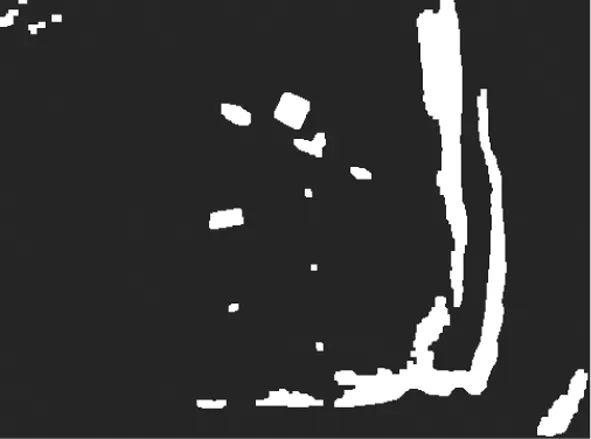
图4 分割后的高程图
(9)
3.2 基于最小外接矩形估计的目标检测
最小外接矩形估计方法其基本思想是先计算所有数据点的最小多边形凸包,然后根据其最小外接矩形必然有一条边与最小多边形凸包相重合的理论,计算最小多边形每条边情况下的外接矩形面积,取面积最小者对应的矩形即为这些数据点对应的最小外接矩形MABR[10-11]。图5给出了多边形凸包、外接矩形和最小外接矩形的空间分布关系图。
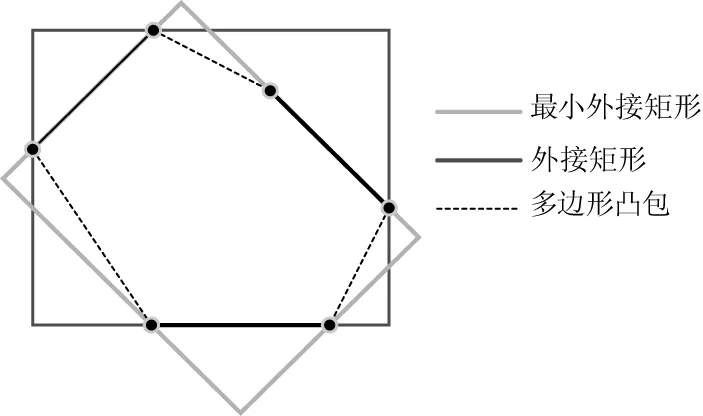
图5 多边形凸包、外接矩形和最小外接矩形的空间分布关系图
通过上几节处理后的激光三维成像雷达距离像,还需要通过其轮廓分析对坦克目标进行描述。具体实现步骤如下:
1)经图像分割后对二值图像进行轮廓追踪,先计算出目标轮廓对应的凸包,链接目标的凸包得到一系列的封闭区域。设目标凸包的坐标点集合为C={(x1,y1),(x2,y2),(x3,y3),…,(xn,yn)},以(x1,y1)为起点,按照顺时针方向环绕轮廓一圈得到的坐标点形式表示。计算全部四个多边形的端点,记为Dxmin,Dxmax,Dymin,Dymax。
2)通过四个点构造D的四条切线,如果一条或两条线与一条边重合,那么计算由四条线决定的外接矩形的长度、宽度、面积和姿态等信息,并保存为当前最小值,否则将当前最小值记为无穷大。
3)顺时针旋转线直到其中一条和多边形的一条边重合,计算新矩形的面积,并且和当前最小值比较。如果小于当前最小值则更新,并保存确定最小值的矩形信息。
4)重复步骤3,直到线旋转过的角度大于90°,输出外接矩形的最小面积及其长度、宽度和姿态等信息。
5)根据找到的每个区域的最小外接矩形,统计出每个区域的长宽、面积、质心等信息,另根据激光三维成像雷达的探测视角及探测距离和坦克的实际尺寸信息,计算出坦克目标在距离像上投影的高程和长宽信息等,据此以这些参数可以作为判别目标性质的依据,从而可以从众多目标中迅速检测出坦克目标。
对图4中分割出的目标进行处理,从图6的结果可以看出,可以准确的检测出距离像中满足尺寸要求的坦克目标。

图6 采用最小外接矩形估计检测的坦克目标
4 方法总结与仿真结果
通过上几节的介绍,我们将本文提出的方法总结为如下:
1)对激光三维成像雷达距离像I进行预处理得到去噪后的距离像I1;
2)选取合适的结构元素窗口大小,利用形态学的方法估算场景中的地平面获得地面图像I2;
3)设置高程阈值T1和T2,并根据式(6)构造差值图像矩阵I3,计算I3中的每个点的高程值,剔除小于T1和T2大于的点,剩下的点即为坦克目标及干扰目标。
4)计算每个目标的最小外接矩形获得每个目标的长宽、面积、质心等信息集合C,计算坦克目标在距离像上投影的高程和长宽信息等,以这些参数可以从众多目标中迅速检测出坦克目标。
使用上述方法对激光三维成像雷达距离像(1)~(4)进行处理,处理前后的结果如图7所示。(a)列为原始距离像,(b)列为高程图,(c)列为处理后的距离像,矩形框的部分为检测出的坦克目标。

图7 本文方法仿真结果
从上述实验结果上可以直观的看出,能够从建筑物、植物、山坡中有效地检测出坦克目标。图1(c)~2(c)中平地和山坡上的坦克目标都检测到,图3(c)中可以看出有小部分遮挡时的坦克目标也能被检测到,图4(c)中被大部分遮挡时的坦克目标无法检测到,矩形框标记的指挥车被误检。
5 结 论
通过对激光三维成像雷达获取的地面目标距离像分析,本文所提出的是一种基于激光三维成像雷达距离像的目标检测方法,不需要处理海量点云数据集,从而能够快速有效地检测出坦克目标,满足实时性需求。该方法对于垂直俯视或斜视探测下有明显距离差异的目标场景,易取得较好的效果,满足了激光三维成像雷达对地面目标检测的要求。但由于本文所采集的距离像数据集中坦克目标的炮筒成像效果较差,无法准确提取坦克炮筒特征,对于与坦克长宽高尺寸差异较小的相似目标(如运兵车、指挥车等)其检测效果可能会存在一定的误差,从而值得进一步研究。