电动叉车举升机构设计及有限元分析*
2020-08-05张义壮
张义壮,冯 川
(滨州学院 机电工程学院,山东 滨州 256600)
0 引 言
叉车作为港口作业、仓库车间及配送中心等场所主要的短距离运输工具,可实现货物的搬运、码放及装卸等功能,在城市工业生产中发挥着重要作用。电动叉车因操作简单灵活,工作噪声小及故障率低等特点而被广泛应用于各类工程领域,加之排放法规的日趋严格和市场监管的逐步规范,更刺激了电动叉车产业的迅猛发展[1]。据中国工程机械工业协会工业车辆分会发布的叉车销售数据显示,2019年我国叉车的总销量达608 341台,其中电动叉车销量298 637台,占比49%,较2018年增长6.24%,电动叉车的市场显著增加[2]。
由货叉、叉架和门架组成的举升机构是电动叉车最主要的工作装置,承载着运输货物的全部载荷,其结构性能对叉车工作时的安全稳定有着重要影响[3]。因此,应当对电动叉车举升机构的力学性能进行必要的计算分析,以满足日常的使用要求。
1 电动叉车举升机构选型
1.1 货 叉
笔者研究的电动叉车主要结构参数如表1所列。
表1 电动叉车主要结构参数
货叉是安装在叉架前端主要的取物装置,呈L形,由水平和垂直两段组成。当叉车叉取货物时,货叉的水平段插入货物底部,承载货重。垂直段则固定于叉架上,带动货叉上下移动,完成货物的搬移。为减小货物叉取时的阻碍和干涉,设计时要求货叉水平段表面需保持平整,且前端呈前窄后宽变化,叉尖两侧由圆弧连接,以避免由于应力集中造成货叉两段的开裂。
根据货叉与叉架连接方式的不同,货叉可分为挂钩式和铰接式两种,两类货叉结构如图1和图2所示。挂钩型货叉依靠凹孔中插入的定位销来实现货叉的固定,此种货叉间距的调整需人工手动完成,精度低且难度大。铰接型货叉的垂直段顶端设计有圆孔,松套固定在叉架的水平轴上且能绕轴旋转,货叉垂直段支靠在叉架的横梁上。该货叉结构设计简单,安装拆卸方便,又能实现角度的调节,因此在分析时选用铰接式货叉为研究对象。
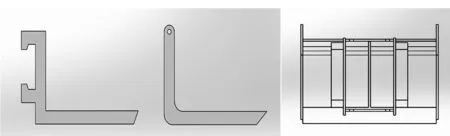
图1 挂钩式货叉 图2 铰接式货叉 图3 焊接式钢板叉架
1.2 叉 架
叉架是货叉与门架的连接部件,通过门架内侧的槽型导轨,带动货叉沿轨道上下运动,实现货物搬运的升降功能。叉架可分为铸造叉架和焊接叉架两种,铸造叉架采用热处理工艺,通过模型浇注,完成叉架的加工。此方法生产的叉架表面较为粗糙,自重较大,因此本研究选用由钢板焊接而成的框结构式叉架为研究对象,图3表示焊接式钢板叉架的结构图。
1.3 门 架
门架是叉车货物搬移中主要的运动机构,通常由内门架和外门架两部分组成,外门架顶端设计有导槽与滚轮,用于安装叉架和货叉,承受货物的主要载荷。内门架底端固定于叉车底盘处,通过车体支撑整个举升机构[4]。
常见电动叉车门架结构主要有二级门架和三级门架两种,结构形式如图4、5所示。三级门架较二级门架有较大的行程高度,并能实现举升机构的自由起升[5]。但三级门架结构较为复杂,由于多一级门架机构,使得自身重量有所增加,造成货物在升高后出现一定倾斜。且制造成本偏高,工作时易出现故障。因此,本文研究的举升机构选用二级门架设计。
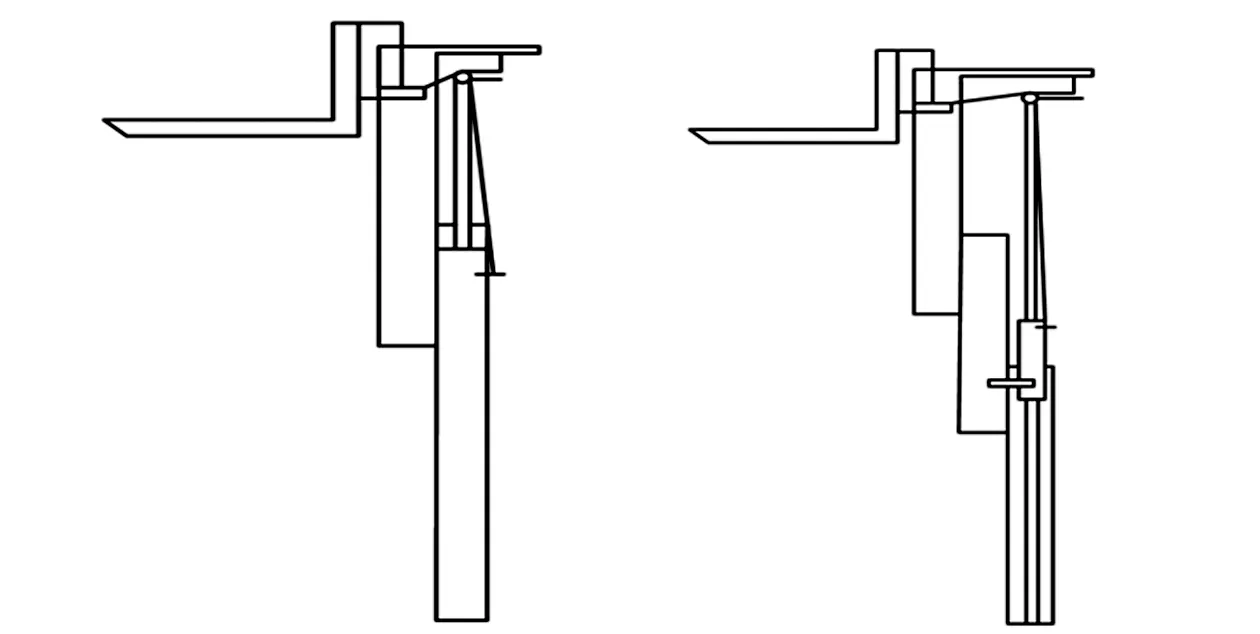
图4 二级门架 图5 三级门架
2 电动叉车举升机构模型建立
2.1 举升机构参数确定
设定电动叉车额定举升质量为Q=3 000 kg,举升机构的基本参数如表2所列。
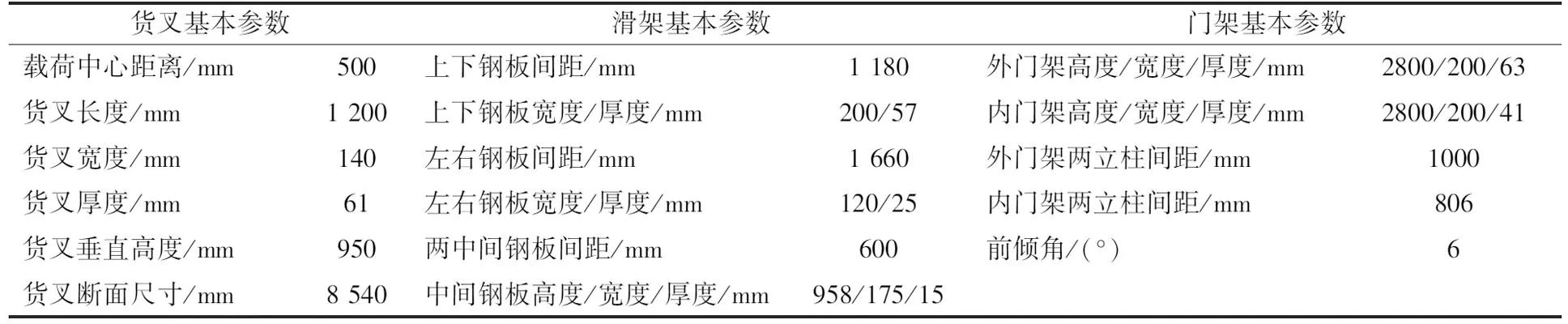
表2 电动叉车举升机构基本参数
2.2 举升机构三维模型建立
根据表1中主要的结构参数,在Solidworks中分别建立货叉、叉架和门架的三维模型,定义货叉厚度为61 mm,叉架上下钢板厚度为57 mm、左右钢板厚度为25 mm、中间两钢板厚度为15 mm,门架高度2 800 mm,宽度200 mm,三维模型如图6~8所示。由配合条件对举升机构各部分进行装配,图9表示整体装配图。
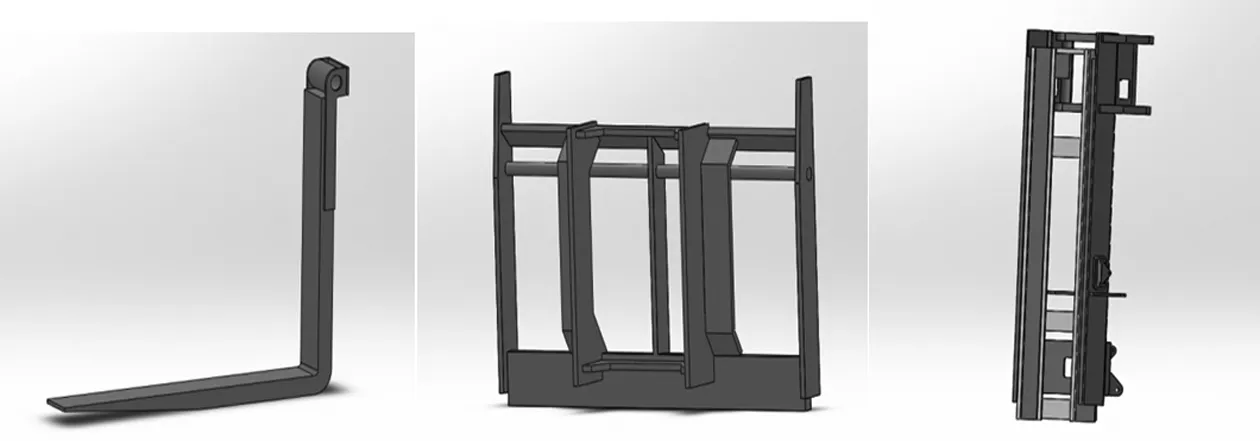
图6 叉车货叉三维模型 图7 叉车叉架三维模型 图8 叉车门架三维模型
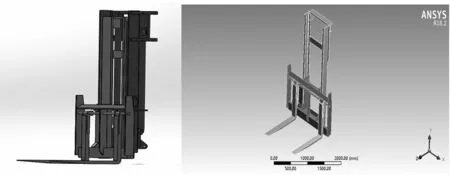
图9 举升机构装配 图10 举升机构有限元模型三维模型
2.3 举升机构有限元模型建立
将建立的举升机构三维模型导入ANSYS中进行有限元分析,有限元模型如图10所示,其中货叉材料选用40Cr,叉架和门架材料选用Q235钢,各材料性能参数如表3所列。
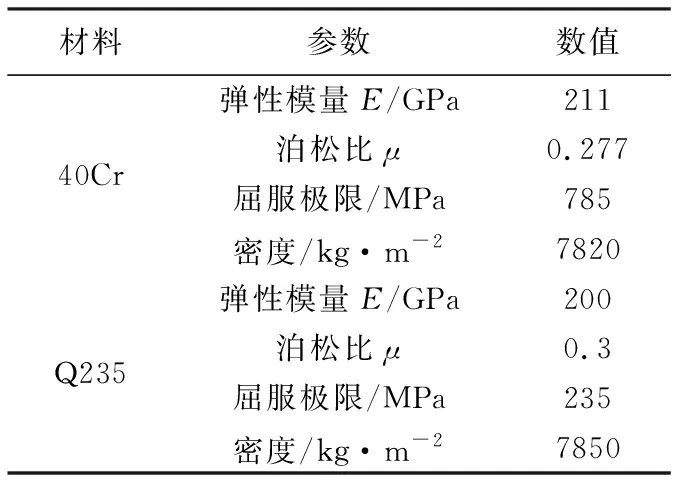
表3 电动叉车举升机构各材料性能参数
在进行有限元网格划分时,选用四面体网格形式,由于货叉的叉根部位应力相对集中,故对其进行了网格细化处理,从而获得更加精确的应力变化。最终得到的电动叉车举升机构网格划分如图11所示,其中网格总数共22 208个,节点总数共22 208个,平均网格质量为0.88。
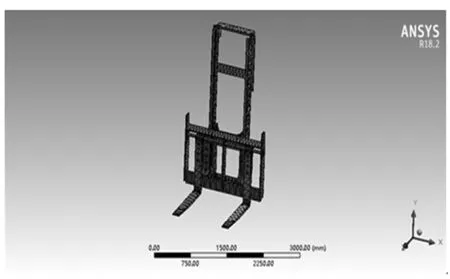
图11 举升机构有限元网格划分
3 静力学分析
3.1 货叉的受力分析
根据货叉与叉架的联接方式,选用的铰接式货叉可简化为支撑在两个铰接支座上的静定钢架[6],在水平段中间位置受一集中载荷P0的作用,图12表示货叉简化后的受力图。

图12 货叉简化受力分析图
3.2 货叉的强度校核
载荷P0由起重货物的重量决定,同时又受不同载荷系数的影响,根据公式(1)计算出货叉所受的载荷:
P0=K1K2(Q/2)
(1)
式中:Q为额定举升质量,Q=3 000 kg;K1为动载荷系数,K1=2.5;K2为偏载荷系数,K2=2.6。
带入参数计算得P0=9 750 N。在强度校核时,安全系数n应满足以下条件:
n=σs/σ≥3~3.5
选取安全系数n=3,计算得到许用应力为:
[σ]=σs/n=785/3=261.7 MPa
(2)
由图12受力分析可知,货叉水平段受弯矩和剪力作用,垂直段受弯矩和拉力,危险截面位于垂直段下部靠近两段连接处,其最大应力为[6]:

(3)
式中:P为货叉所受载荷,P=9 750 N;C为载荷中心距,500 mm;t为货叉的厚度,t=61 mm;b为货叉的宽度,b=140 mm。
带入参数计算可得:
故货叉强度满足要求。
3.3 货叉的刚度校核
在货叉刚度计算时不考虑偏载系数与动荷系数的影响,只取工作时的正常载荷进行分析。货叉叉尖处的许用挠度为[6]:
(4)
在货叉叉尖处挠度的计算公式为[6]:
(5)
式中:P0为工作载荷,P0=Q/2;I为货叉的截面惯性矩,I=t3b/12;E为货叉材料的弹性模量,E=211 GPa;d为两支座间距,d=400 mm;e为底部支座距两段连接处距离,e=160 mm。
带入参数计算可得:
w=14.13 mm<[w]
故货叉刚度满足要求。
中,苏楠先答应下来。要是真在上海当律师,我完全可以帮你找到。我有个同学,恰好在上海律师协会工作。她有太多的疑问,最当务之急的是,既是自己的女儿,为什么还要去找?她知道杨小水不会解答她的疑问,只好等着回去问李峤汝。
综上所述,通过对货叉强度和刚度的理论计算可知,货叉结构设计能够满足使用要求。
4 有限元分析
满载工况是叉车承载额定货重的特殊状态,反映了叉车所能达到的极限能力,因而对研究叉车的使用性能十分重要。利用ANSYS软件对网格划分后的举升机构模型进行有限元分析,得出满载工况下应力及位移的变化云图[7]。考虑到叉车在满载行驶过程中会发生上下的振动颠簸,因此在加载前需对载荷增加一定的动载系数,本研究取值为2.5。
约束的施加方案对有限元分析结果会产生直接影响,关系结论的真实性与合理性[7]。此次研究对举升机构施加约束的步骤为:
(1) 导入举升机构的有限元文件后定义材料属性。
(2) 对门架的上方和底部背板位置进行自由度的约束。
(3) 对叉车货叉加载相应的集中力,并对整体结构添加重力。
(4) 添加需要求解的应力和位移。
图13表示满载工况下电动叉车举升机构应力变化情况。由图可知,举升机构的最大应力为171.54 MPa,出现在货叉叉根(即水平钢板和垂直钢板连接)处。由公式(2)计算可得许用应力为261.7 MPa,最大应力小于许用应力,其强度满足使用要求。
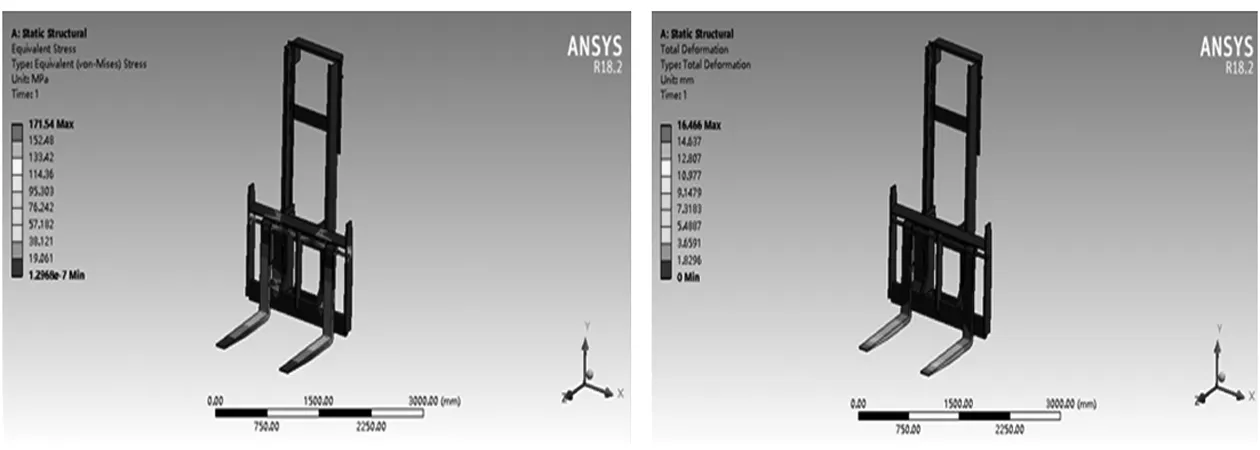
图13 满载工况下应力变化 图14 满载工况下位移变化
图14表示满载工况下电动叉车举升机构位移变化情况。由图可知,举升机构的最大位移变形为16.466 mm,主要集中在货叉的叉尖部位,由公式(4)计算可得最大允许的变形量为24 mm,最大变形量小于许用量,其刚度也满足使用要求。
5 总 结
对电动叉车举升机构的货叉、叉架及门架等主要结构进行了选型设计,在Solidworks中建立了三维仿真模型。通过受力分析计算出电动叉车举升机构的最大应力及变形,完成强度与刚度的理论校核。最后,将建立的模型导入ANSYS中进行了有限元分析。结果表明,电动叉车举升机构的结构参数能够满足正常的使用要求。分析结论对电动叉车举升机构的设计研究及机构优化提供了一定的理论依据。
