水陆两栖飞机船体线型优化设计与试验验证
2020-07-31郑小龙唐彬彬王明振蒋荣
郑小龙,唐彬彬,王明振,蒋荣
(中国特种飞行器研究所 a.高速水动力航空科技重点实验室;b.水动力研究中心,湖北 荆门 448035)
对于水陆两栖飞机而言,船体的线型设计是整个水面飞行器设计过程中一个尤为重要的环节。与高航速的滑行艇相似,水陆两栖飞机的底部采用的是船体结构,而飞机在水面高速滑行的过程中,船体会逐渐上浮直至离水,因此,衡量水陆两栖飞机船体线型优良的标准在于水面滑行阶段的阻力及滑行稳定性。有部分学者对于水面飞行器的阻力性能开展了一部分研究[1],但其主要手段还是依靠理论经验和模型试验,在准确性和时效性方面有一定的缺陷。而在船舶领域,虽然有很多学者对高速滑行艇的阻力性能预报及优化进行了大量的研究[2-6],但考虑到水陆两栖飞机断阶船体的特殊性,相关的研究方法尽管在预报精度方面具有一定的参考价值,但对于水陆两栖飞机的复杂船体而言仍存在较大的局限性。传统的水陆两栖飞机船体线型设计与优化,主要依靠母型船改型,并通过反复的水动试验和模型修改才能得到较为满意的结果。然而试验成本高昂,且模型加工耗时较长,这种优化设计方法难以保证型号的研制周期。因此,提出一种基于CFD的优化设计方法,对水陆两栖飞机船体的水动性能进行快速预报,并根据预报结果对船体模型在三维设计软件中进行滚动式优化,最终仅将最优线型投入到工程试验来进行结果验证。这种方法不仅可以缩减试验次数,而且减少了实物模型的加工次数,对于缩短研制周期和提高经济性具有重要的意义。
1 数学模型
船体水动力性能预报在STAR-CCM+计算软件中进行,在计算机中建立单船身模型水面滑行的数值水池。其控制方程由基于流体不可压缩状态下的连续性方程和RANS方程组成。
(1)
(2)

2 计算模型
2.1 计算模型与网格划分
计算模型选用的是水陆两栖飞机的单船身结构(即不含机翼与尾翼),根据MVP水陆两栖飞机线型资料自行设计而得。原始设计模型总长2.73 m,初始纵倾角为3.15°,离水速度13.8 m/s,船体主断阶高度H为27 mm,前体斜升角为20°,后缘角为8.9°,浮筒高度h为67 mm(即浮筒根部距离舭线的高度),浮筒底部斜升角θ为5°,船体外型见图1。

图1 原始船体外型
导入模型后,建立水动性能计算域。由于船体为对称结构,数值计算中仅取船体的一半以节省网格数量。船体艏部距离来流入口为1L(L为船长),船艉距离尾流出口边界为5L,船体重心距上部边界和底部边界的距离分别为1L和2L,计算域的宽度设置选为4L。由于单船身模型在滑行过程中会出现较大的姿态变化,模型会出现较大的升沉和纵倾,因此,计算将采用重叠网格的方法进行网格划分,建立一个小型几何体将单船身模型包围作为重叠域,称其为小域,并建立相应的局部笛卡尔坐标系,见图2。
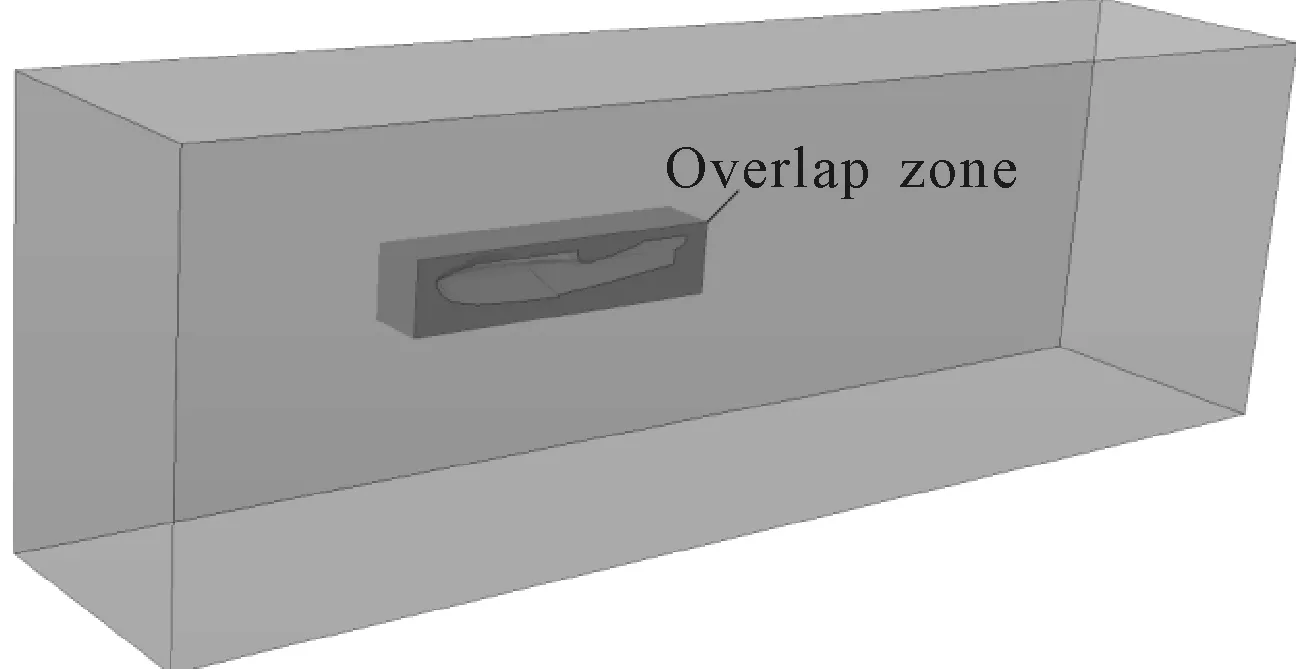
图2 数值计算域
对于运动与网格的处理,采用区域运动的方式进行。整体计算网格模型见图3。当船体模型受力发生六自由度运动时,船体与小域之间保持位移不变,而是二者作为一个整体发生运动,通过改变流场参数在网格中的分布,插值获得船体在发生位移之后的流场参数与网格的对应关系。
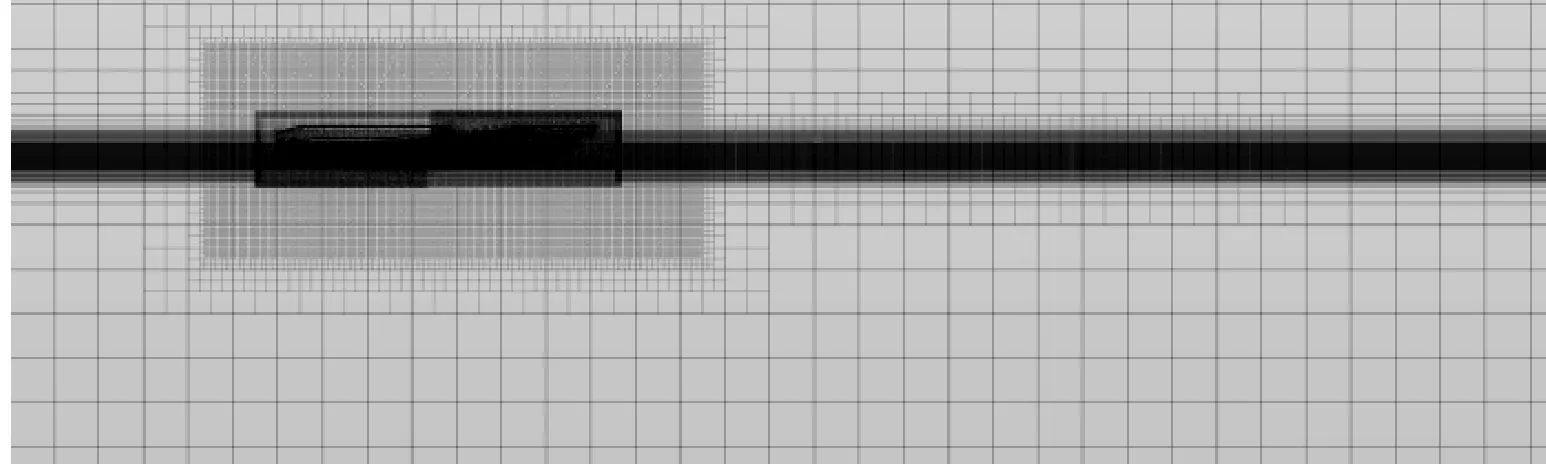
图3 计算网格
考虑到网格对计算结果的影响,所有计算模型均采用同一种网格布置形式,只需将模型实体进行几何替换即可获得对应的网格模型,且各个模型的网格数量基本相同。为了更精细准确地捕捉船体壁面附近的流动特性,将船体表面的y+值控制在50左右,计算域的总网格量为891.47万,其中船体所在的小域网格量为564.19万。
2.2 边界条件
动量方程的离散采用隐式有限体积法,自由液面的捕捉采用VOF方法进行,计及重力的影响且采用标准大气压作为参考压力对流场进行初始化,湍流模型选用Realizablek-ε,对流项选用二阶迎风模式,时间步长ΔT=LWL/200V,式中:LWL为水线长;V为航速。
3 计算结果与优化设计
3.1 原型CFD计算结果
CFD计算得到的原型阻力、升沉和纵倾角见表1。其中,阻力的表示采用无因次化的水阻力系数R/G,即模型水阻力R与重力G的比值。
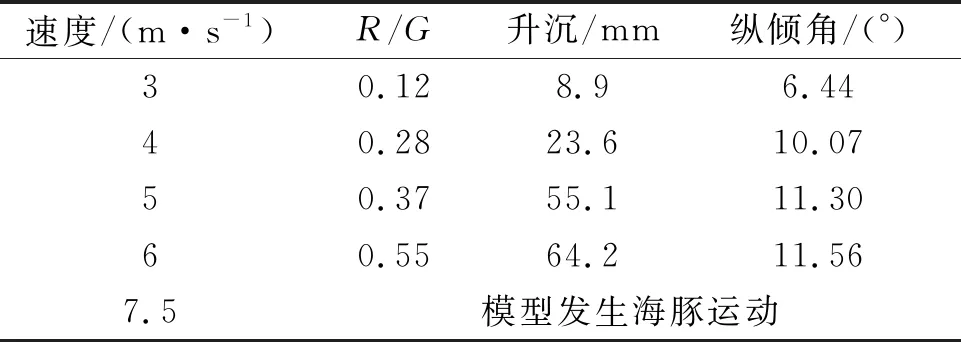
表1 原型CFD计算结果
由表1可见,单船身模型阻力及运动姿态过大,水阻力系数接近0.55,纵倾角度随着速度的增大而增大,这也是稳定性变差从而导致模型出现“海豚运动”的主要原因。
原始模型在6 m/s速度下的自由液面波高分布云图见图4。
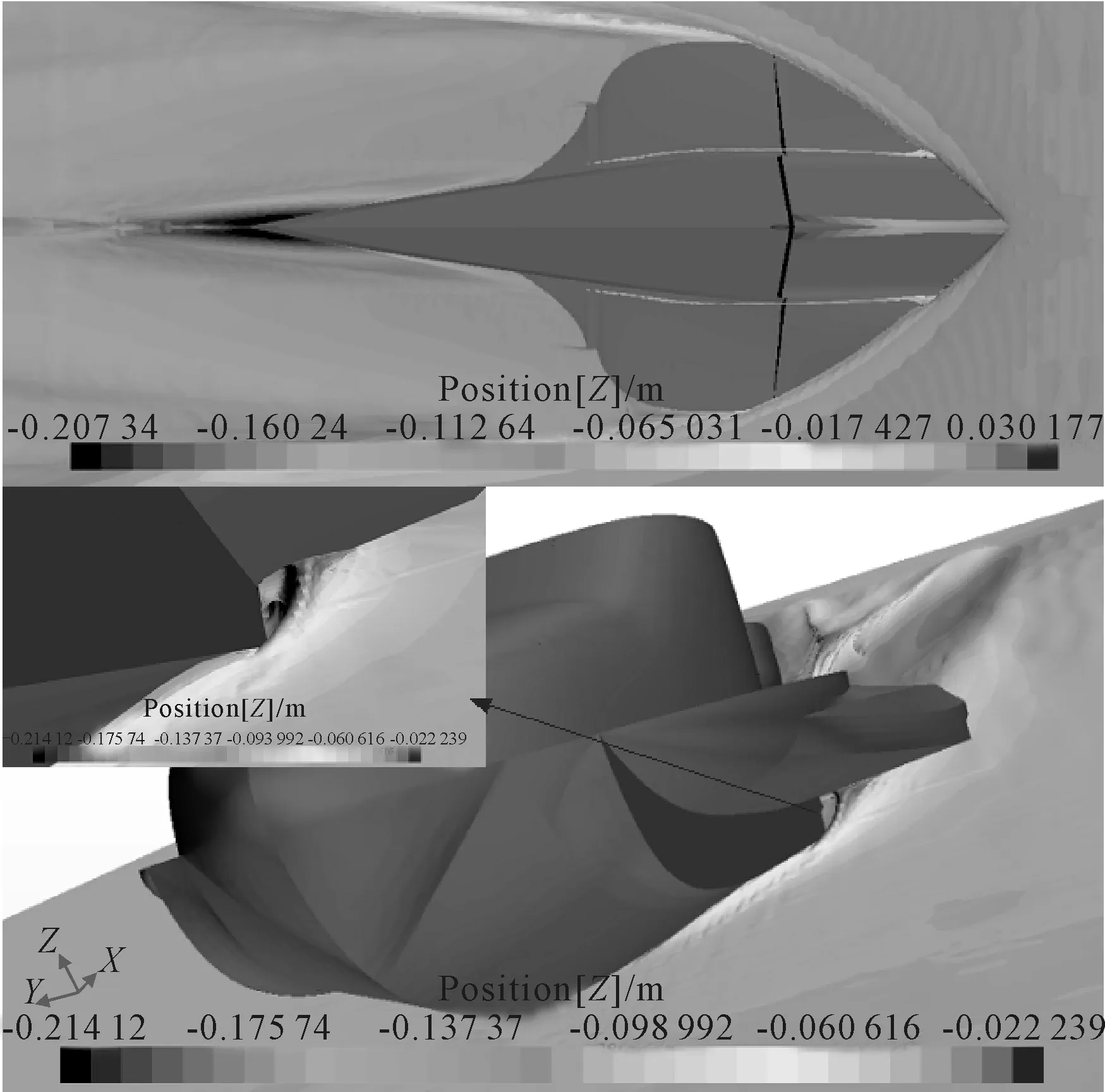
图4 6 m/s速度下自由液面波高分布云图
由图4可见,断阶后的船身后体并未与水发生分离,船体滑行面过大,断阶未起到水流分离的作用,因此,造成了船体水阻力偏大。同时还可以看出,船体前底的喷溅冲刷在浮筒底部,在船体滑行的过程中形成了一个施加于船底的脉动力矩,浮筒底部存在局部高压区,图5所示的船底压力分布云图也揭示此为造成模型阻力偏大及滑行稳定性变差的另一重要原因。

图5 6 m/s速度下船底压力分布云图
3.2 船体线型优化
对于水陆两栖飞机而言,水阻力系数的设计要求一般是不超过0.2,基于原型的阻力及运动姿态的计算结果,将从阻力性能和纵向稳定性两个方面对船体计算结果展开分析和优化。原型的CFD计算结果显示模型运动姿态较大,航速在50%离水速度时纵倾角已达11.56°,可能是由于后缘角偏大导致运动过程中后体无法及时提供足够的水动升力所致。从船体的喷溅可以看出,水流从舭线飞溅至两侧浮筒的底部形成局部高压,较大的浮筒高度导致水花喷溅在浮筒底部形成了一个不稳定力矩。因此,将主要从船体断阶高度、后缘角、浮筒下表面高度和斜升角度等因素对船体阻力性能和纵向稳定性进行优化。各船型方案关键参数见表2。

表2 各船型方案关键参数
在原方案的基础上,首先将后缘角由原方案的8.9°减小至6.6°,浮筒高度降低至10 mm,浮筒底部斜升角增大至10°,使得喷溅的水流在船底表面光滑过渡,形成A型方案。此外,在A型方案的基础上所有参数不变,仅将船体的主断阶高度增大1倍至54 mm,得到型线B见图6。
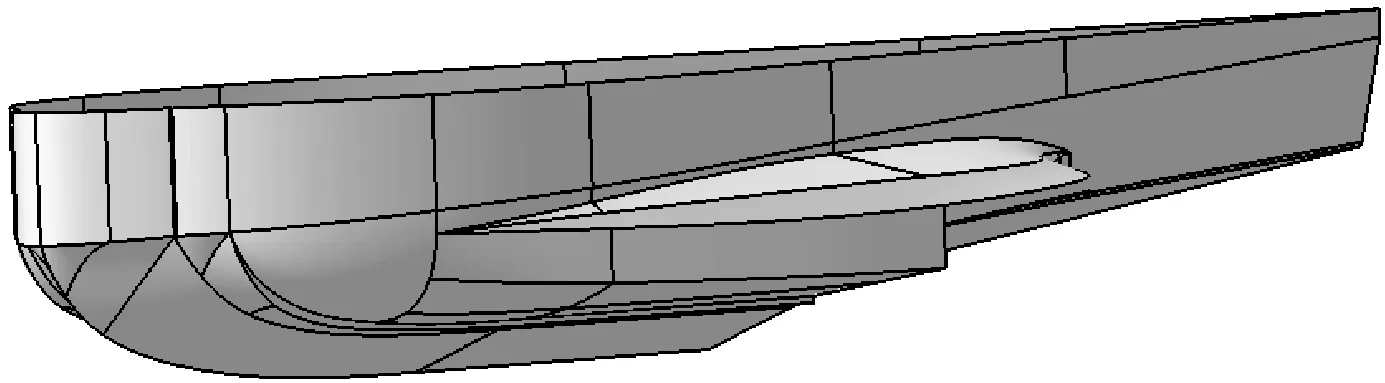
图6 B型方案船体型线
3.3 优化方案CFD计算与分析
将两型优化方案的三维模型替换原型实体后重新生成网格进行计算。3种方案的水动力性能计算结果对比见图7,计算所得的三要素分别为阻力系数、纵倾角和升沉。
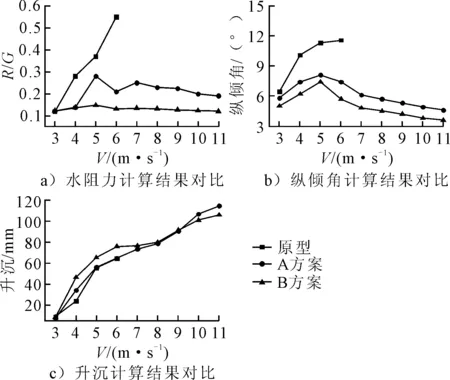
图7 3种线型方案CFD计算结果对比
从3种方案的计算结果对比可知,A型和B型方案都实现了船体在静水面的稳定滑行,说明降低后缘角和优化浮筒底部的型线起到了积极的作用。但A型的阻力与B型相比略大,最大水阻力系数比B型约高出1倍。
提取A、B 2个优化模型的自由液面波高分布云图,对船底的水流分离情况进行对比,见图8。

图8 6 m/s速度自由液面波高分布云图
由图8可见,A方案的船身后体并未完全分离水流,断阶高度不够导致船身后体的通气性不足,后体依然有部分被水流吸附,不能完全脱离水面,造成了阻力偏大的结果。而将断阶高度增加至8%的断阶宽度(即断阶高为54 mm)时,模型高速状态下的后体通气性明显增强,从图8b)反映的流动情况可以得知,后体部分已经完全离水,模型以前体作为滑行面在高速滑行,获得了良好的阻力性能,且最大水阻力系数仅为0.148。
4 试验验证
本次试验在中国特种飞行器研究所(605所)高速拖曳水池中完成,试验水池长为510 m、宽为6.5 m、水深为5 m,拖车的最大速度为25 m/s。水陆两栖飞机单船身模型水面拖曳试验的安装示意见图9。在船体艏、艉部各安装有1个导航片,将适航仪上的2根导航杆分别插入艏、艉的导航片中,既能限制模型在滑行过程中中避免发生左右偏航,又可以保证单船身模型能够自由地进行上下、前后和俯仰等运动。

图9 单船身模型试验安装示意
试验模型采用B型优化方案的船体线型,模型采用木制结构加工。静水面拖曳试验测量的水动性能参数主要是模型的阻力、升沉和纵倾角。将阻力仪固定于拖船的上方,拖线经过拖船将阻力仪与试验模型相连,待航速稳定后拖线便处于紧绷状态,此时测力仪所得的数据即为模型总阻力。安装在模型前侧的倾角传感器测量出模型的纵倾角,而重心位置处的拉线式位移传感器则测模型升沉。在模型中添加配重,使得单船身排水量达到机身总重量,在重心处用钢丝绳和滑轮将模型与卸载箱相连,卸载重量用以模拟飞机的气动升力。
B型方案试验结果(Exp)与相应CFD计算值的对比见图10。从计算曲线的整体规律来讲,CFD计算结果与试验值的吻合度较高,模型第一和第二阻力峰分别出现在5 m/s和7 m/s速度下。

图10 B型方案计算结果与试验值对比
试验得出模型的最大水阻力系数为0.153,较原始模型减小了0.4。从定量的角度进行比较,CFD计算阻力峰与试验误差仅为3.46%,最大误差为7.61%,平均误差控制在5.28%以内,二者吻合度较高。而纵倾角计算值最大误差也控制在8.8%以内,只是3 m/s速度下模型的升沉计算值低于试验值29.1%,这是由于该速度下的模型升沉为10.3 mm,数值处于较小的量级,造成了误差偏大的结果。
6 m/s速度下船体自由液面波高分布见图11。

图11 6 m/s速度下船体自由液面波高分布
由图11可见,该速度下船体断阶已经有效阻断了水流,船身后体未被水所吸附,后体已经完全离水,与图8所示的计算结果一致,进一步验证了计算结果的可靠性和优化方法的可行性。
5 结论
通过对带鳍式浮筒的水陆两栖飞机船体线型进行多参数优化,获得了最大水阻力系数仅为0.153且纵向稳定性优良的船体线型。同时,将CFD计算值与模型试验结果进行比较,水阻力的计算值与试验最大误差为7.61%,纵倾角计算值最大误差也控制在8.8%以内,从定性和定量的角度验证了计算结果的准确性。研究表明,采用基于CFD的水陆两栖飞机船体线型优化设计方法是可行有效的,与高昂的水动力试验成本相比,该方法在水陆两栖飞机船体线型的研制中具备更好的经济性。