螺旋桨负荷轻重的逆向修正计算与实践
2020-07-31谭国辉
谭国辉
(珠海新概念船艇科技有限公司,广东 珠海 519000)
通过调研华南地区多家设计建造高速船的船厂在最近5年内的完工记录,发现修桨十分频繁,有些船型甚至返修达到5次以上,船厂每年为此导致的返工及交船延期损失巨大。这些高速船应用领域广泛、数量众多,在国民经济中占有重要地位,但这类船舶型线多变,功能各不相同,尺度、航速跨度很大,性能方面涉及低速排水型、中速过渡状态、高速滑行、超临界滑行等状态,材质涉及钢质、铝合金、玻璃钢及钢-玻、钢-铝、铝-玻等组合情形,而且出于成本和建造周期等原因,基本不做模型试验,缺乏阻力数据,客观上为螺旋桨的匹配带来了很大难度,已成为制约中小船厂发展的瓶颈之一。广大基层工程技术人员对于修桨存在认识盲区,因此,有必要对此情况下如何正确修桨和如何防范修桨失控、失败进行论述,为解决当下一些现实的困难提供通用思路和实用经验。基于上述需要,以一艘小船的修桨经过为线索,以实船试航数据为基础,运用螺旋桨设计原理[1]逆向辅助计算求出可匹配的准确参数,有针对性地实施修桨。该方法具有通用性,可为今后预防和解决修桨问题提供行之有效的参考。
1 研究对象
选择23.3 m观光艇作为目标:①由于该船问题中的“变量”较为明确,便于说明问题;②经过试航测试,数据比较真实;③方法相通,与船的大小无关。技术参数见表1。

表1 23.3 m观光艇技术参数
2 出现的问题
首制船的试航结果见表2。

表2 试航结果
1)该船是已经大量建造过的成熟船型,据此可以判断重量重心基本稳定。
2)该船船底型线为玻璃钢模具成型(型线未变),结合1)可以判定阻力规律稳定。
由表2可知,该船状态可控,航速基本达标,仅出现了螺旋桨偏重的单一问题。该船的阻力及船-桨关系已是“定量”,船-机-桨三者之间只有“机-桨”关系为“变量”。船东要求必须将主机的最高转速提高到1 850 r/min,同时不能降低航速。
3 修桨方式及结果
船厂决定按照经验进行修桨,历次修桨情况见表3。
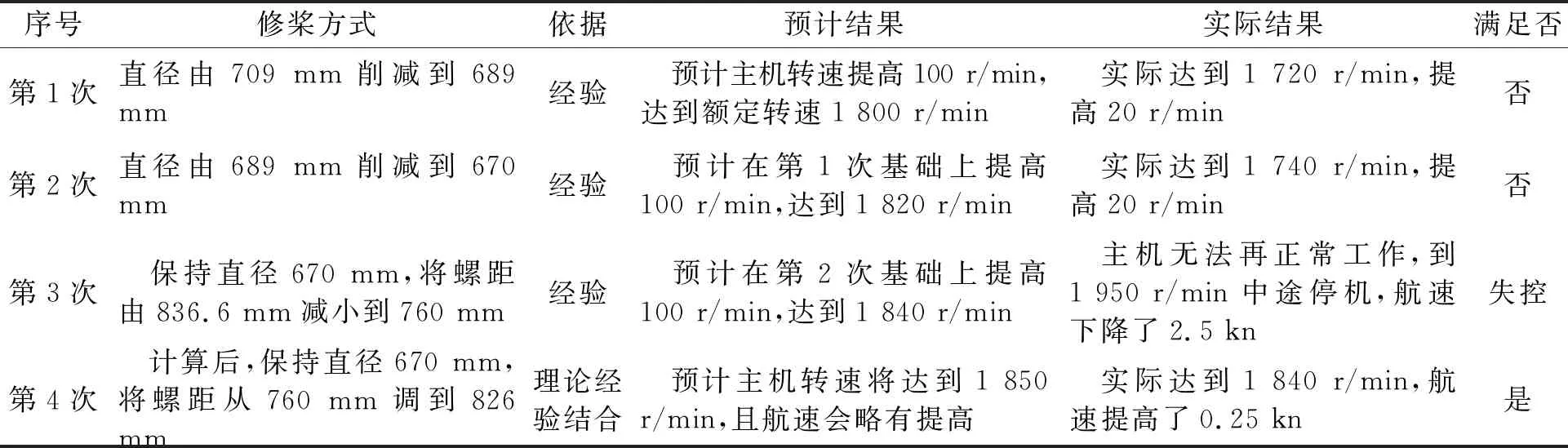
表3 历次修桨方式与效果
4 疑问及意外发现
4.1 结果不符
由桨的推力公式T=Kt(ρN2D4)可知,推力T与直径D4成反比,而推功率Pt=TV,偏重时减小直径D对改变推功率曲线Pt必然效果显著。然而,该船历次修正量与实际提高的幅度不仅与以往同船型的修桨结果相差甚远,而且与理论预测幅度[2-4]相差甚远。
针对表3中的结果,按照以往的实践,该桨直径削减近40 mm,主机转速提高100~150 r/min,实际提高的转速仅40 r/min;将直径从670 mm减小为650 mm,发现推功率曲线Pt与有效功率曲线EHP的交点难以靠近额定转速1 800 r/min。
4.2 寻找真相
该船虽然是批量建造过的成熟船型,但本次采用的主机与以往不仅功率不同,而且品牌不同。进一步将本机的万用特性曲线与其他品牌机型进行对比,发现本机的末端功率输出十分疲软(即后端的增长率很小,功率曲线过平)。该机从1 700~1 800 r/min速提高了100 r/min,功率仅增加12 kW,折算到螺旋桨上可吸收的功率不到7 kW,可见本机最后100 r/min的功率输出曲线是很“平”的,在此就把这一段“平缓”的区间定义为主机功率曲线的“末端”,见图1。可以肯定,几乎所有的螺旋桨匹配问题都是在“末端”发生的,因此,在螺旋桨设计和修桨中关注这个“末端”有重要现实意义。客观上,“末端”对于每一款机器都是存在的,但是不同机型的末端走势(即 “增长率”)不尽相同,显然这是由机器自身的性能所决定的。
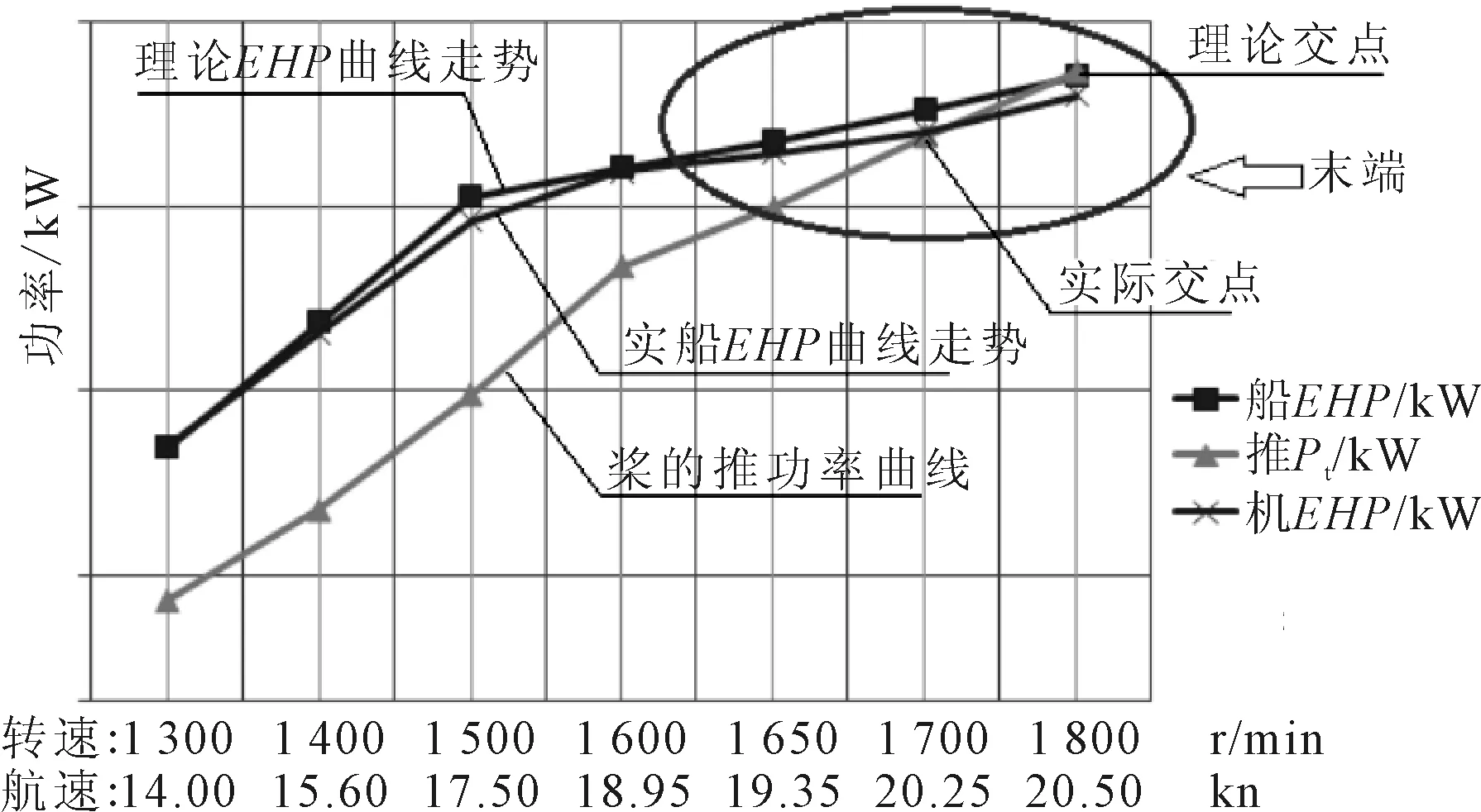
图1 EHP曲线的末端走势差异对比
经分析,发现问题不是出在桨的推功率曲线Pt,而是出在有效功率曲线EHP。当Pt曲线显著变化时,只有EHP曲线的走势过于平缓才会出现两者的交点移动量不明显的情况。见图2。
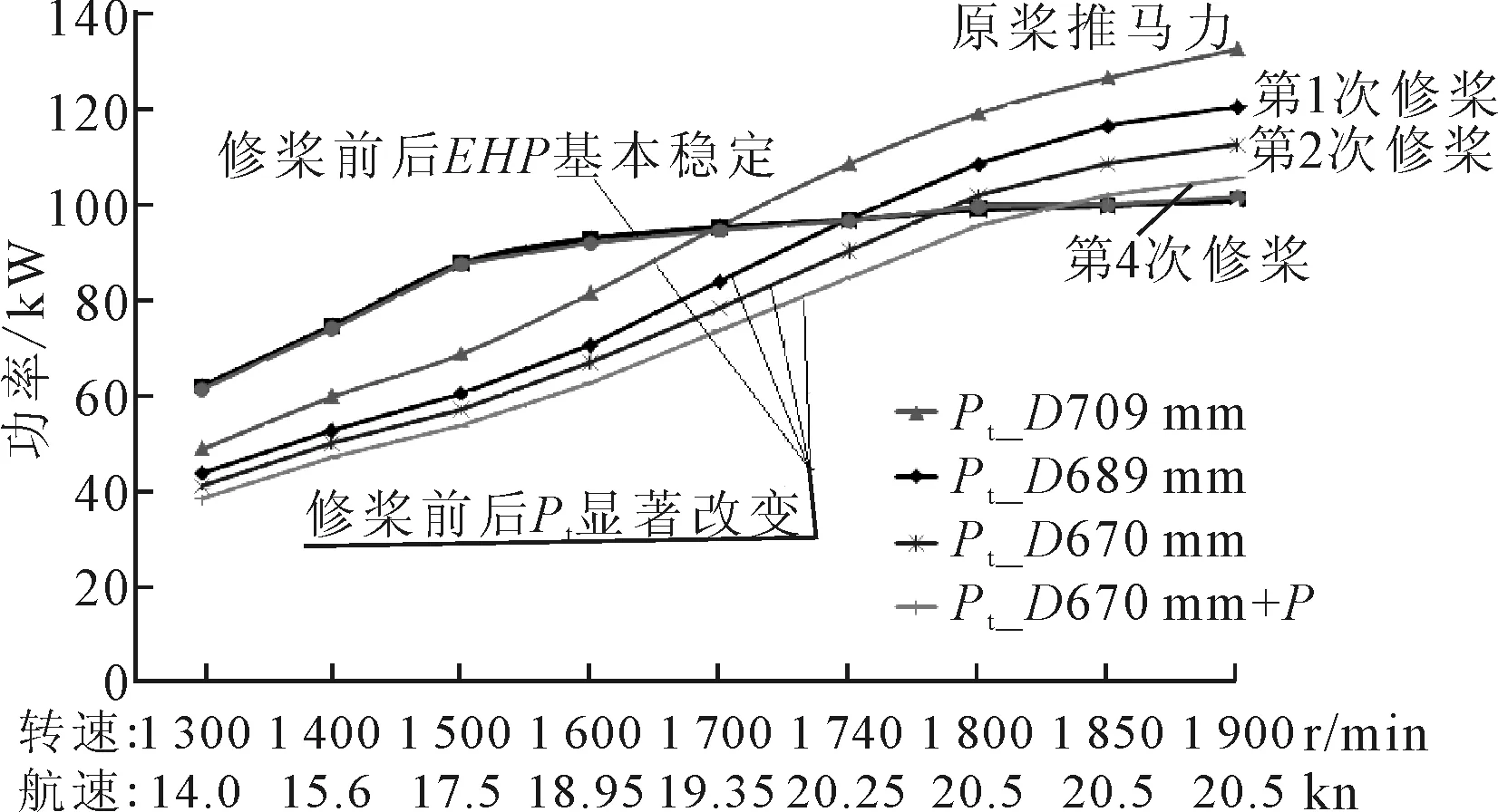
图2 原桨与历次修桨变化趋势叠加
5 逆向辅助计算
5.1 匹配的本质
依据文献[5],“机-桨”匹配的本质是同时实现“转矩同步”和“转速同步”。匹配不佳时就会出现“异步错位”的问题,可采取的改善措施可归纳如下。
1)偏重:①削减直径[6-7],优点是成本最低,操作简单,效果大多数都比较理想;②减小螺距[8],优点是效果好,缺点是极难掌控,容易失败。
2)偏轻:①适当增大螺旋桨的螺距,以增大负荷,降低转速;②从船的角度考虑(尤其当实际航速超过时),适当增大附体阻力,效果较好。
5.2 逆向推理过程
要实现精确修桨、一次到位,修桨之前的计算推理必不可少,正确的修桨方式建议按下列步骤进行。
步骤1。通过试航测出实船的主机轴功率BHP-主机转速N-船的航速V的对应关系。
步骤2。结合主机万有特性曲线,换算出对应各转速下主机实际输出功率与台架实验值的差额,进而掌握实际转速与实际输出功率之间“错位”关系。
步骤3。根据原桨的固定要素求出原桨在各个速度V下的实际推进因子TPC。
步骤4。依据主机外特性功率,按推力平衡换算出主机实际做功的有效功率EHP。
步骤5。校核原桨设计时采用的有效功率曲线是否与主机实际做功的有效功率曲线相符,如有差异,要修正到相符,同时对于“偏重”的情形(偏轻不用),还需要结合原桨计算时估算的有效功率曲线走势结合测量的走势假定一个EHP曲线的“末端点”(见图3),进而完整绘制出实船真实的V-EHP曲线。
步骤6。根据原桨参数求出各个速度V下的实际推功率Pt,并绘成V-Pt曲线;对于“偏重”的情形(偏轻不用),同样需要结合原桨计算时的推功率曲线走势及第5步中实船的EHP曲线“末端点”,换算出符合实船的Pt曲线的“末端点”,见图3、4。

图3 偏重时的“末端点”

图4 偏轻时的“末端点”
步骤7。将V-EHP与V-Pt曲线叠加,两者的交点即试航的最高转速、最高航速平衡点,由此便可看出桨的轻重情况。由于转速小范围内变化,EHP曲线完全稳定,由图2可知,偏重则需将Pt曲线略微上移,偏轻则需将Pt曲线略微下移;这个略微的移动幅度是修桨中重点要求的螺旋桨修正量。
步骤8。针对偏重的情形(偏轻不用),固定螺旋桨的其他要素,改变直径D,按照新的螺距比P/D和进速系数J求出桨的实际推功率曲线Pt,如此重复,试算几组让Pt曲线与EHP曲线相交于额定转速点,即可找到合适的直径D,实现匹配。
步骤9。如果步骤6尚未达到目标,可固定螺旋桨的其他要素,扭转桨叶,改变螺距P(改变螺距对于偏重、偏轻都适用), 按照新的螺距比P/D计算出桨的实际推功率曲线Pt,如此重复,试算几组让Pt曲线与EHP曲线相交于额定转速点,即可找到合适的螺距P,实现匹配。
步骤10。如果原桨计算严重不准时,单采用步骤8或步骤9都不能满足要求,则必须考虑同时改变直径D和螺距P(从头设计一个新桨),排列组合试算若干组,计算方法同理,同样可找到一组可行的组合,最终实现匹配。
上述10步理论上可以解决缺乏阻力数据的任意修桨问题,并可延伸到“修船”领域[9]。步骤1~8适用于一般情况,步骤9适用于那些末端功率输出疲软的机型,步骤10针对原设计严重失准的情况。当然,其中有一些是基于工程中对结果无明显影响的假设,数学逻辑不一定十分严谨,但实践的效果证明,只要趋势掌握好,足以满足工程需要。
6 4次修桨的推理验证
由于推理计算过程冗长且较为常规,限于篇幅,在此主要阐述解决方法、推理思路和实践结果。采用上述方法步骤对目标对象的准确性检验结果如下。
以原桨设计时采用的有效功率曲线(船EHP)为基础,以实船测量的结果为依据换算出主机实际做功的有效功率曲线(机EHP),发现实船的EHP曲线在末端明显下移,导致与推功率曲线Pt提前相交于1 700 r/min处,由此便推出了螺旋桨的实际工作现状,与实船试航结果相符。
1)第1次修桨。以最高转速1 700 r/min为基准,把直径从原来的709 mm减小为689 mm,由于直径D减小导致实际螺距比P/D及实际进速系数J=Va/(n·D)明显增大,从而引起推力系数Kt明显减小,而Kt=T/(ρn2D4),可知桨的实际推力T将减小,又有推功率Pt=T·V,可知修改直径后的实际推功率曲线Pt将略微下移,从而出现与实际有效功率曲线EHP的交点前移的情况,理论上可达到1 740 r/min,而实船试航为1 720 r/min,实际提高了20 r/min,基本相符。
2)第2次修桨。再从689 m减小到670 mm,Pt与EHP的交点理论上再次前移,理论上应达到1 770 r/min,而实船试航为1 740 r/min,实际提高了20 r/min,基本相符。
3)第3次修桨。固定直径670 mm,将螺距由836.6 mm减小到760 mm,桨推力T迅速下降,出现了Pt曲线与EHP不再有交点的情况,交点在各自的延长线,说明螺旋桨负荷下降过快,主机的转速将会大幅上升,这与实船第3次试航主机转速上升到1 950 r/min中途停止运转的实际结果相符。
4)第4次修桨。固定直径670 mm,将螺距由760 mm调到826 mm(试算后确定的),桨推力T回升,Pt曲线与EHP再次出现交点,理论上应达到1 825 r/min,实际试航结果为1 840 r/min,基本相符。
将末端区间放大,把历次修桨后螺旋桨的实际推功率曲线Pt重叠到推进特性曲线图上,发现理论预测结果与试航时实际提高的幅度几乎相同,证明前文的推测正确。
由此可知,历次修桨结果在原理上有其必然性,也证明为何该船直径削减40 mm主机转速仅提高40 r/min这一“反常”现象。
7 不确定的“末端点”
对于实船的有效功率曲线EHP和桨的推功率曲线Pt在偏重时的末端点都是“假定”出来的,但是这个“末端点”必不可少。没有这个点,就无法预测EHP与Pt的额定工况在何处相交,因此,需要进行一些近似处理。
对于EHP,需要依据修正后的阻力曲线走势来定,由于阻力估算的航速范围必然大于实船的设计航速点,意味着要找的这个“EHP末端点”必定是这条阻力曲线对应的有效功率曲线上的一个点(内插值),可靠性有保障。
对于Pt,还是分“偏重”和“偏轻”两种情形来说明。
1)对于偏重的情况,这个“末端点”必须处在额定工况点之外,即末端点的转速N>额定转速n(才能满足内插值的要求),由于机器的实际转速没有达到额定转速,可以肯定机器还有一部分功率没有发挥,据此推断必定有末端点的EHP≮额定转速时的EHP;在此给出一个参考值:末端点的转速取额定转速加50~100 r/min。末端点的功率,结合桨在该转速下的敞水效率取额定功率加2%~5%。
2)对于偏轻的情况,实船试航时的最高转速就是“末端点”,额定转速点属于内插值。由于主机达到额定转速以后,主机再超转速,功率也不可能再增加的基本事实,结合桨在该转速下的敞水效率,可以推断试航时最高转速下的EHP约等于或略大于额定功率。
上述参考值不是绝对的,不能独立使用,必须以实船阻力曲线的走势和螺旋桨推功率曲线的走势为基础运用上述的参考值,才能得到较为可靠的结果。
8 结论
1)修桨是小范围内的精度问题,在最后100 r/min范围内,主机自身的性能(功率曲线走势)是影响机-桨匹配不可忽视的因素,尤其是后段功率输出疲软的机型影响甚大。对于此类机型螺旋桨出现偏重的概率很高,仅靠额定功率/转速这一个孤立的“点”来匹配桨的要素不可靠。
2)在桨偏重时,一般认为削减直径是最合适的选择。本文发现对于那些后段功率输出疲软的机型,出现桨偏重时,削减螺旋桨直径效果不明显,调整螺距在任何时候对于矫正“轻重”都效果显著,但调螺距带来的影响幅度很大,极难掌控,需要准确的计算和丰富的操作经验。