一种低照度图像目标识别方法
2020-07-25陈路路
张 玲,张 焱,陈路路
(中国电子科技集团公司第五十四研究所,河北 石家庄 050081)
0 引言
低照度图像[1]与普通可见光图像相比,具有信噪比低、亮度对比度小的特点,不利于目标检测识别,为实现目标的及时、准确识别,需发展高精度的目标识别方法[2]。方向梯度直方图(Histogram of Oriented Gradient,HOG)特征是用来进行目标识别的特征描述算法,通过计算和统计图像局部区域的梯度方向直方图来构成特征。在图像中,局部目标的表象和形状能够被梯度或边缘的方向密度分布很好地描述,计算一块区域内的所有像素处的梯度信息,即突变的方向和大小,然后对360°进行划分,得到多个bin,统计该区域内的所有像素所在的bin,就得到了一个特征向量,这就是HOG特征,目前,基于HOG特征可实现行人检测[3]和车目标的检测[4]。
基于图像特征的目标识别有多种模式识别方法,如统计模式识别方法,包括K最近邻分类算法[5]、决策树方法[6]、基于信息几何的方法[7],人工智能方法,包括BP神经网络方法[8]、深度学习方法[9]、稀疏表示识别算法[10]和遗传算法[11]等。然而,统计模式识别方法在样本数量有限的情况下难以估计特征样本的概率密度函数,导致分类精度较低。为了改善分类精度,引入人工智能方法,但人工神经网络方法在处理小样本和高维特征问题时,容易陷入局部最优,且计算复杂度明显增加[12]。而基于统计学习理论的支持向量机方法[13]建立在结构风险最小化准则基础之上,具有较强的泛化能力,适用于小样本训练的情况和高维特征的处理。
本文以HOG特征抽取和支持向量机技术[14]为基础,提出了一种传感器图像目标分类识别方法。该方法通过抽取图像特征、选择核函数以及相关参数,实现了低照度条件下基于图像HOG特征的目标分类识别。
1 目标分类识别
传感器目标分类识别系统由目标检测、特征提取和分类识别等模块组成。目标检测得到目标数据,进而从中提取目标特征,最后基于目标特征进行目标的分类识别。
针对已检测到的关键帧图像数据,经过图像的裁剪、缩放、灰度化以及Gamma归一化等预处理后,完成HOG特征提取,然后构建目标分类器,利用分类器完成目标的分类判别,目标分类识别框架如图1所示。

图1 目标分类识别框架Fig.1 The framework of target classification and recognition
2 HOG特征提取算法
本文选择提取图像的HOG特征,作为分类器的输入。首先将彩色图像转换为灰度图像,进而完成图像梯度分量的计算和梯度计算,通过cell划分和block划分生成图像特征向量,主要包括:梯度计算、cell直方图的计算和block特征的计算。
2.1 梯度计算
选择水平梯度算子为[-1 0 1],竖直梯度算子为[1 0 -1]T。首先用[-1 0 1]梯度算子对原图像做卷积运算,得到x方向(水平方向,以向右为正方向)的梯度分量Gx(x,y),然后用[1 0 -1]T梯度算子对原图像做卷积运算,得到y方向(竖直方向,以向上为正方向)的梯度分量Gy(x,y)。然后再用以下公式计算像素点(x,y)处的梯度大小G(x,y)和方向角度α:
α=tan-1(Gy(x,y)/Gx(x,y))。
2.2 cell直方图的计算
将图像划分为多个cell,每个cell是n像素×n像素,然后每2×2的cell构成一个block,对每个cell中的每个像素的梯度按照方向统计直方图,360°bin的划分如下,这里进行了9等分,分别得到落入[0,40),[40,80),[80,120),[120,160),[160,200),[200,240),[240,280),[280,320),[320,360)的梯度,然后把每个bin中梯度的范数相加,就得到了该bin的分量。这样就得到了一个cell的特征,即一个9维的向量。
2.3 block特征的计算
将block中cell的所有特征串联起来,构成该block的特征,然后归一化,即把每个特征除以该特征向量的范数,归一化是为了消除光照的影响。这样每个block是一个9×4=36维的向量。
最后,将所有的block的特征向量串联起来就是最终的特征向量,即HOG特征。
3 支持向量机分类器
目标特征提取后,本文选择SVM分类器进行目标的分类识别。SVM分类主要有3个步骤:核函数的选择、二次规划问题的求解和分类判别。
3.1 核函数的选择
常用的非线性核函数K(x,xi)有二次函数、多项式函数、径向基函数以及多层感知机函数等,其中径向基函数(RBF)表达式如下:
(1)
式中,σ是核参数。
3.2 二次规划问题的求解
采用Sequential Minimal Optimization(SMO)算法[15]求解以下二次规划问题,即求解拉格朗日乘子:
(2)
式中,αi,yi,i=1,2,…,n分别是拉格朗日乘子和数据分类标签;y∈{-1,1};n是样本的个数;C是惩罚因子。
3.3 分类判别
根据以下函数,做出分类判断:
(3)
当f(x)=1时,目标属于第一类;f(x)=-1时,目标属于第二类。
4 数值实验
实验中,抽取图像的HOG特征,并采用SVM作为目标分类器。训练样本数和测试样本数如表1所示。

表1 样本数Tab.1 Sample number
将预处理后的图像划分为多个16像素×16像素的cell,计算每个cell的特征,即一个9维的向量,然后每2×2的cell构成一个block,每个block是一个36维的向量,将所有的block的特征向量串联起来,形成图像的HOG特征,人、车目标特征的不同隐含在HOG特征向量中,如图2~图5所示,进而将通过对不同HOG特征向量的学习形成目标分类器。

图2 测试样本-车Fig.2 Test sample:car
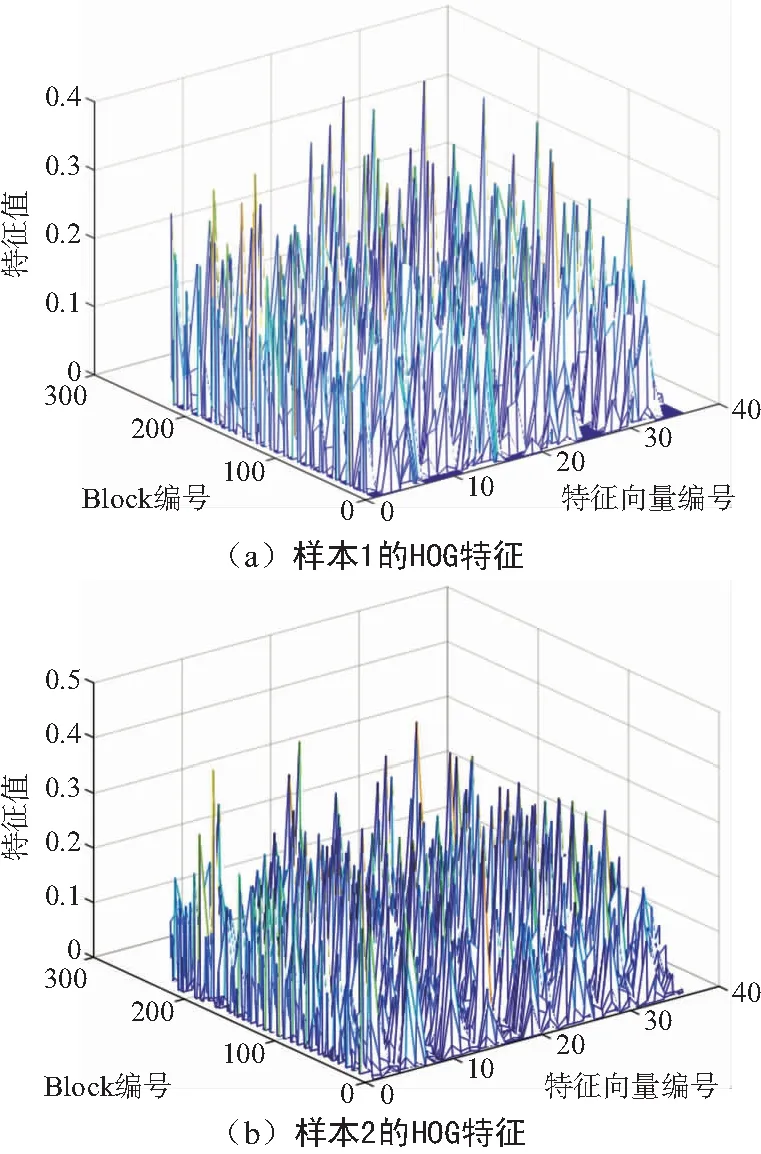
图3 车的HOG特征Fig.3 HOG features of car
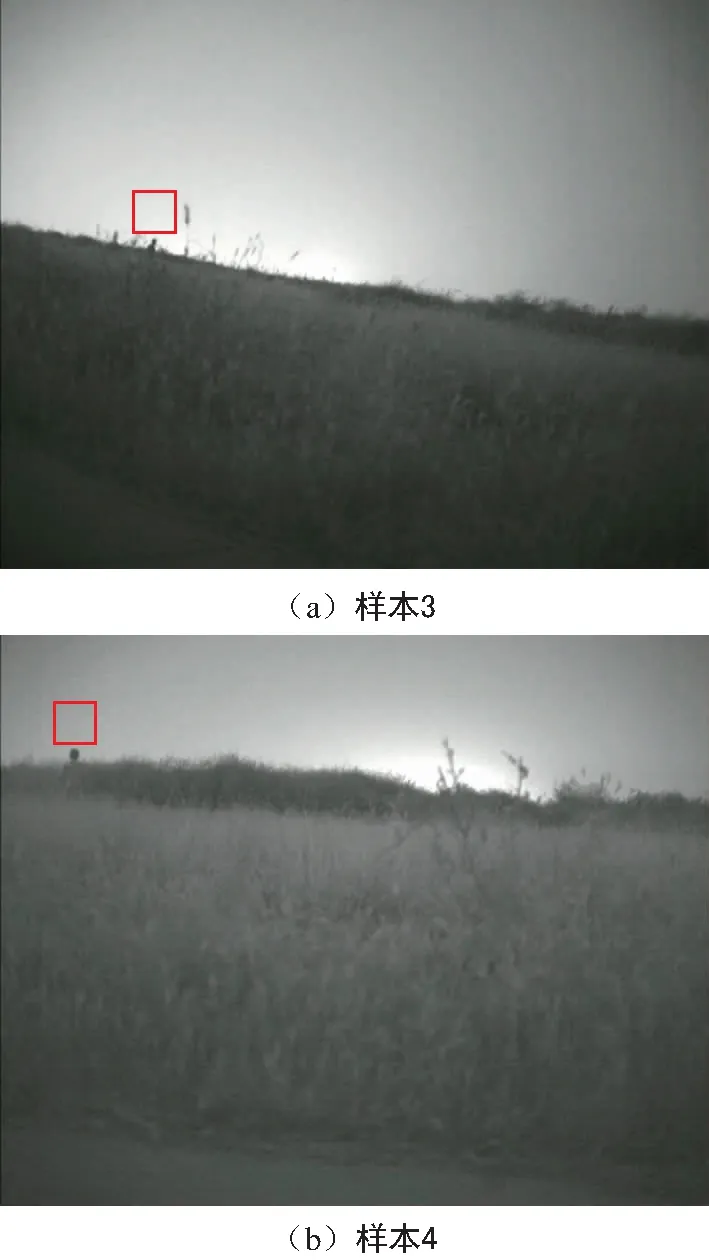
图4 测试样本-人Fig.4 Test sample:person
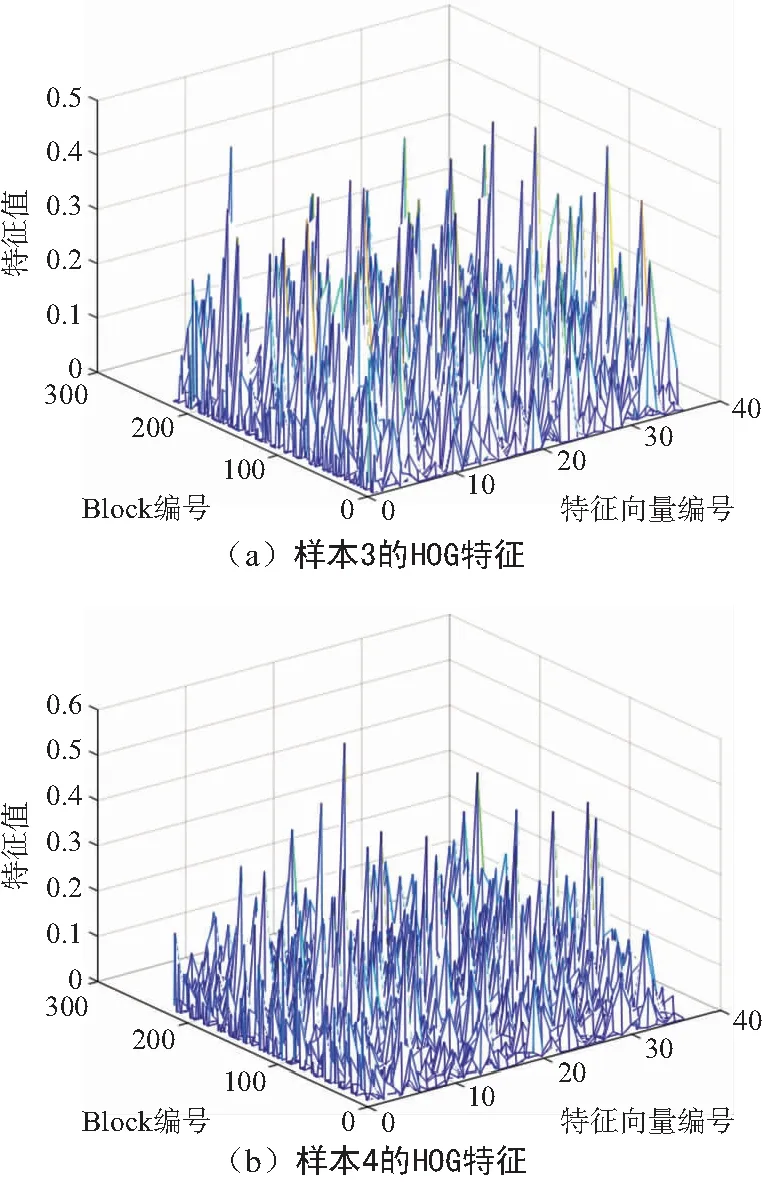
图5 人的HOG特征Fig.5 HOG features of person
对拉格朗日乘子αi和阈值b赋初值,选择惩罚因子和核参数,输入训练样本的HOG特征,求解二次规划问题(2),得到乘子αi和阈值b,通过不断的迭代实验及其结果,获取惩罚因子和核参数的最优组合,完成目标二分类器,然后将测试样本的HOG特征输入分类器,测试结果如表2所示。

表2 测试结果Tab.2 Test results
实验结果表明,不同目标的HOG特征分布不同,且HOG+SVM算法可实现低照度图像的精确分类,准确率优于95%,且惩罚因子值越高,分类精度越高。
由于HOG特征维度为8 100,当采用BP神经网络方法[16]进行测试时,训练速度缓慢,且神经网络参数占用内存极高,不利于实现目标分类识别实时性的要求,故采用SVM机器学习算法实现目标分类具备优越性。
5 结束语
传感器图像目标自动分类识别克服了低照度条件下目标分类精度低的问题,实现了对目标分类识别统一性、稳定性和实时性的要求。针对目标分类问题,设计了一种基于HOG+SVM的目标分类方法,其中,HOG算法通过对局部目标的表象和形状进行梯度或边缘方向密度分布的刻画,捕捉不同目标的特征点,对block特征向量的归一化处理,消除了光照的影响,进而HOG特征向量经过SVM训练,完成核函数的选择和拉格朗日乘子、阈值b、核参数、惩罚因子等相关参数的设定,实现了低照度图像目标的精确分类。
