汽车两级自动紧急制动系统控制研究
2020-07-22李刚,杨志,吴迪
李 刚,杨 志,吴 迪
(辽宁工业大学汽车与交通工程学院,辽宁 锦州 121001)
1 引言
近年来,随着社会和国民经济的飞速发展,人们对生活品质的要求逐渐提高,汽车作为重要交通工具对人们的需求越来越大。随之带来的就是汽车的保有量逐年升高,对道路交通的压力加大,交通事故的频发给人们和社会带来了巨大的经济和财产损失[1]。美国对高速公路的交通事故分析中,道路交通事故有91%的情况是由于驾驶员驾驶失误造成[2]。调查结果表明:如果驾驶员可以提前1s 了解到驾驶的危险并且实施了正确的操作,很大程度上会避免道路交通事故的发生[3]。自动紧急制动系统就是检测本车与前方车辆发生追尾碰撞的可能,通过声音、视觉或者触觉的方式提前向驾驶员发出警示。如果驾驶员收到预警信息后没有采取任何措施,则该系统便会自动启动自动紧急制动系统,将车辆进行制动,避免车辆发生碰撞[4]。文献[5]中考虑了环境和驾驶员性格多种因素,建立了汽车前方防碰撞安全距离模型。文献[6]对本车跟前方车辆的运动状态进行分析,建立了两车的运动学方程,对行驶状态碰撞可能的危险程度进行了划分,并建立了防碰撞预警控制策略。文献[7]在传统模型的基础上建立了安全距离模型,通过对前车的运动状态进行分析,考虑前车减速度和本车驾驶员反应时间来规划碰撞的安全行驶距离,该模型下的防碰撞系统有较高的精确性。文献[8]通过调查驾驶员对常规自动紧急制动系统对高减速轮胎-路面摩擦的评估,得出传统的AEB 系统只适用干燥条件的正常路面,对于冰雪天的工况则不适用;同时,设计了适用于道路摩擦的AEB 系统,通过模拟器试验,驾驶自适应主动紧急制动系统的驾驶员的主动安全性和可信度得到显著改善。文献[9]使用单眼相机开发了目标车辆的测量估算算法,精确测量目标车辆的输出,提高了基于视觉的主动紧急制动系统检测性能和低误报率上述方法都较好的实现了自动紧急制动,但自动紧急制动系统中对减速度的控制应与驾驶员制动时的减速度大小较为符合,即在某种工况下自动紧急制动系统采取的减速度与驾驶员想实施的制动减速度相近[10]。由于各种工况不同、实际决策的复杂性以及行为的不确定性,驾驶员对每种工况下的理想的制动减速度大小是不同的[11]。论文[12]对四轮独立驱动轮毂电机电动车再生制动的控制原理进行了分析,针对高速紧急制动工况,通过合理分配前后轴制动力、合理协调液压制动力与再生制动力,提出了一种新的协调制动控制策略。因此论文研究在保证制动效能前提下同时兼顾汽车制动时驾驶员的舒适性要求的两级自动紧急制动策略,即从低速和高速两种工况下对自动紧急制动系统进行建立,包括完全制动和部分制动,在部分制动中,做大量实验选取最舒适制动减速度值。
2 自动紧急制动系统安全距离模型的建立
研究的自动紧急制动系统安全距离模型要考虑前车运动状态,分别对前车匀速行驶、前车加速行驶、前车减速行驶三种工况进行分析,得到在各种不同工况下相对应的安全距离模型。
2.1 安全距离模型的建立
(1)前车减速行驶

(2)前车静止

(3)前车加速行驶

式中:v0—本车制动前的速度;v1—前车制动前的速度;t1—驾驶员反应时间;t2—制动器夹紧过程所需要的时间;t3—制动减速度线性增加过程时间,论文将制动器制动力减速度增长的过程中近似视为线性增长,并且本车与前车的制动减速度线性增长的过程时间相同;a0—本车制动时的制动减速度;a1—前车制动时的制动减速度;ΔS—车辆触发自动紧急制动后脱离碰撞危险后与前车的距离。
上述为自动紧急制动系统完全制动的安全距离公式,式中:af—车辆的最大制动力产生的纵向减速度,自动紧急制动系统部分制动的安全距离公式中将上述公式中af替换成舒适制动减速度ap。
2.2 模型参数选取
2.2.1t2,t3时间参数选取
自动紧急制动系统安全距离模型中有制动器夹紧时间t2和制动器制动压力线性增加到最大值所用的时间t3。制动器夹紧时间与车辆本身机械结构有关系,一般时间为(0.2~0.4)s,选取制动器夹紧时间t2为0.2s。车辆在制动过程中,制动器的制动压力不断升高,将它看作线性增加,这样更容易分析汽车的制动过程,更好的建立安全距离模型,选取制动器制动压力线性增加到最大值所用时间t3为0.2s。
2.2.2 ΔS的选取
在自动紧急制动安全距离模型中ΔS为车辆触发自动紧急制动后脱离碰撞危险后与前车的距离。在式中ΔS一般距离为(1~5)m,主要是考虑到路面附着情况、天气等影响制动距离的因素,故取ΔS为3m,将误差产生的影响尽可能避免。
3 驾驶员舒适制动减速度测定
自动紧急制动系统有两个等级的制动,一种为完全制动,另一种为部分制动。在某种紧急工况下为了避免碰撞必须全力制动,这种情况下进行完全制动。虽然完全制动能够避免碰撞或者降低碰撞损伤,但是有些工况是不需要进行完全制动,如果进行完全制动还会降低道路交通效率,还会影响乘坐舒适性。论文通过大量驾驶模拟器实验,采集驾驶员在制动时习惯采用的制动减速度值,分析并选取最舒适的制动减速度值。
试验选取了16 名有丰富驾驶经验的驾驶员,在开始测试之前,会对每位驾驶员简单讲解试验的目的,试验要采集的数据,驾驶员需要如何驾驶等。为了让驾驶员熟悉驾驶模拟器硬件在环设备,先做几组适应驾驶模拟器的驾驶,排除由于对驾驶模拟器的不熟悉影响试验测试结果。首先在驾驶模拟器硬件在环试验台车辆动力学仿真软件上设计试验工况:一条长直路面附着系数为0.75的路面,在本车起点前方300m 处有一辆时速为20km/h 的障碍车辆,驾驶员在起点正常开始驾驶,由于前面路程没有发现障碍车辆可以随意驾驶,当发现前方有车辆速度明显低于本车车速后开始制动减速,试验采集车辆纵向加速度,对每名驾驶员采集三组以上数据。驾驶员1 进行试验的三组试验数据,如图1 所示,由图可知驾驶员1 经仿真测定舒适制动减速度分别为:0.46g、0.63g、0.62g。
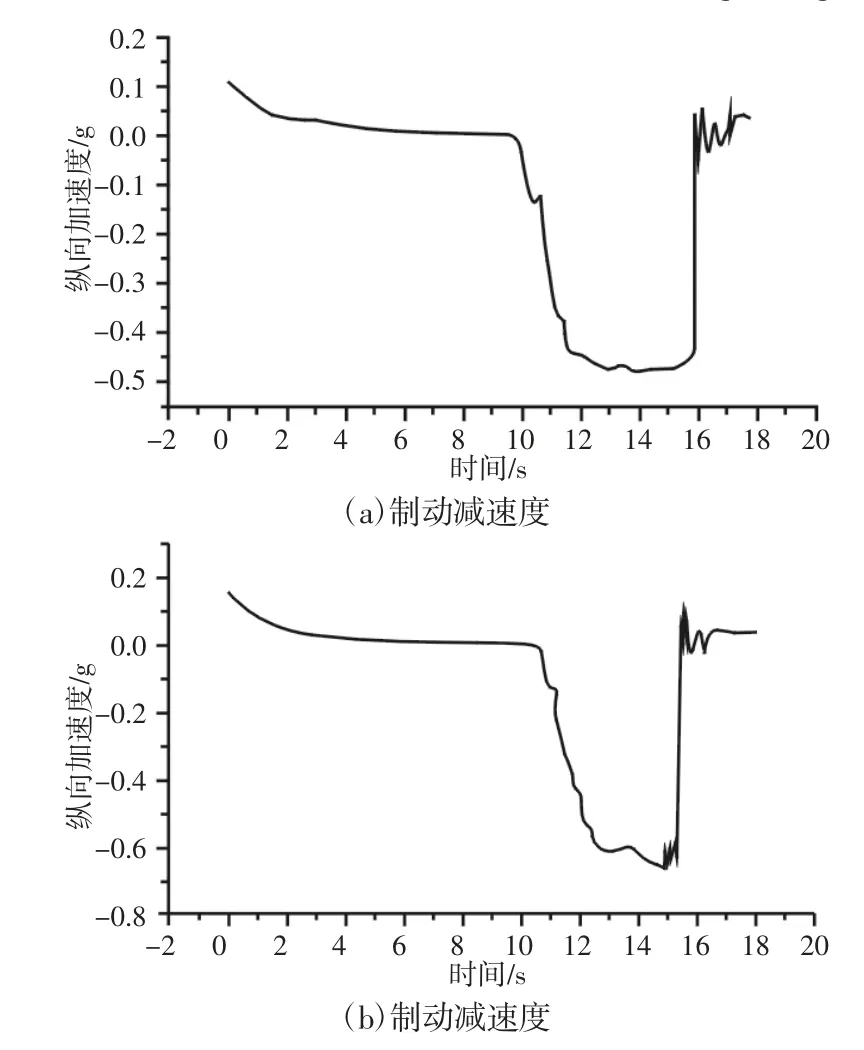

图1 驾驶员1 舒适制动减速度曲线Fig.1 Driver 1 Comfort Brake Deceleration Curve
驾驶员2 到驾驶员16 的舒适制动减速度曲线与图1 类似,16 名驾驶员舒适制动减速度试验的数据采集汇总,如表1 所示。
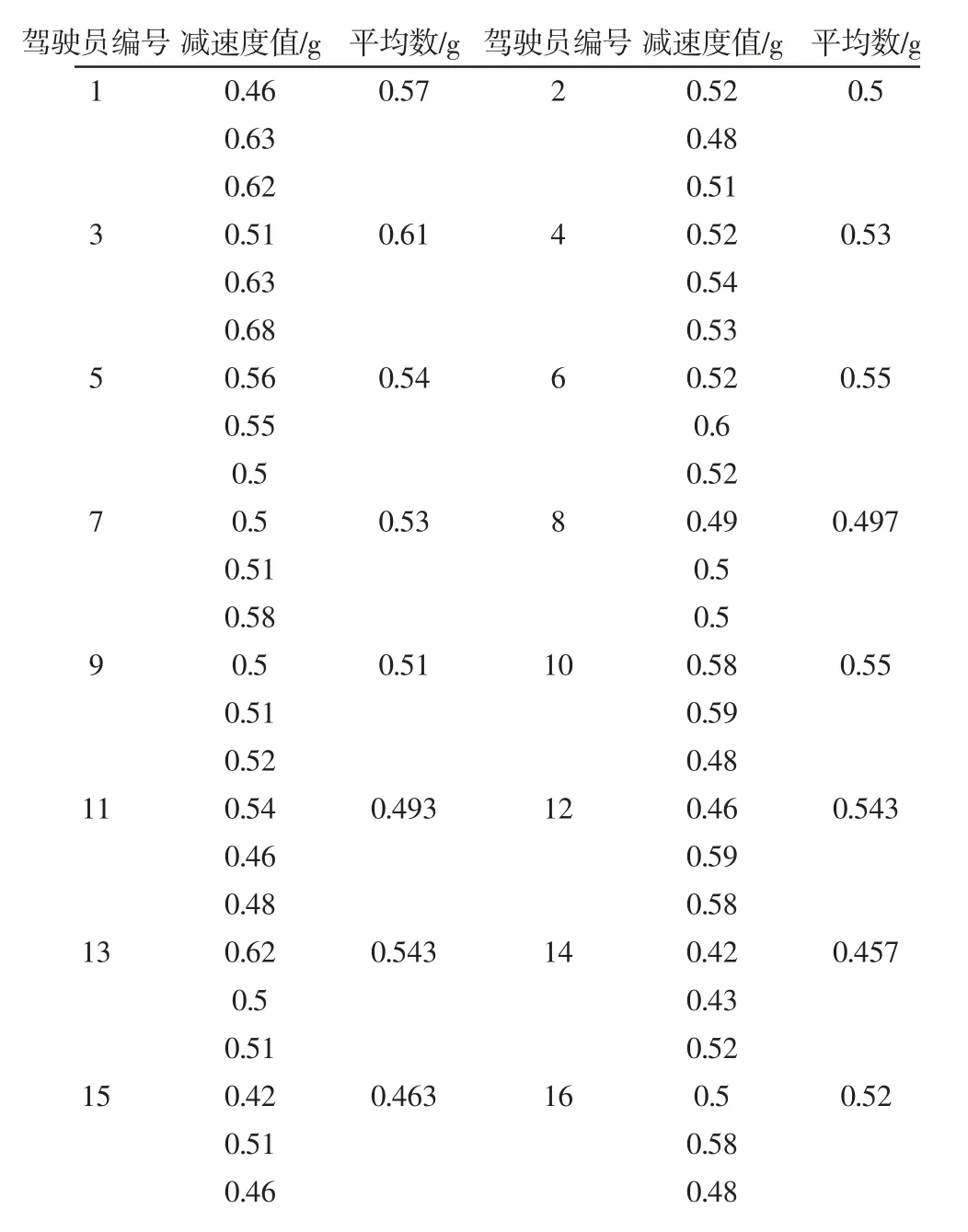
表1 驾驶员舒适制动减速度试验数据表Tab.1 Driver Comfort Brake Deceleration Test Data Sheet
对16 名驾驶员感觉最舒适的制动减速度的平均值进行对比,最后选择0.53g 为舒适制动减速度。
4 自动紧急制动控制策略及控制器设计
对自动紧急制动控制策略在高、低速两种工况下进行研究,车速以80km/h 为界。在高速工况下,立刻采取完全紧急制动,车辆可能造成侧滑等危险状况,因此论文自动紧急制动系统在车辆时速大于80km/h 时,如果触发则以部分制动的制动减速度进行制动;在低速的城市工况中,使用部分制动减速度,对应的安全距离就越大,道路交通效率就会降低,另外,经验丰富的激进型驾驶员与前车的距离在制动时比较小,如果自动紧急制动介入的比较频繁,会影响到驾驶员正常驾驶。故在车辆低速工况下进行完全制动控制时,不考虑驾驶员的乘坐舒适性,只考虑道路通过性与避免发生碰撞,即在较为危险的时刻才会触发自动紧急制动系统。当雷达探测到前方车辆在横向距离2m 之内,自动紧急制动系统则对前车进行距离判断,当相对距离大于一级安全距离Sp时,自动紧急制动系统不触发;当相对距离小于一级安全距离Sp,大于二级安全距离Sf时,自动紧急制动系统采取部分制动;当相对距离小于二级安全距离Sf时,自动紧急制动系统采取完全制动,两级自动紧急制动控制策略,如图2 所示。自动紧急制动系统是在汽车要发生碰撞危险时,自动采取制动措施,使车辆以一定的减速度进行制动来避免碰撞的一种辅助制动系统。该系统需要实时调整轮缸压力,使实际减速度接近理想减速度,设计PID 控制对轮缸压力进行控制。原理,如图3 所示。

图2 两级自动紧急制动控制策略图Fig.2 Two Automatic Emergency Brake Control Strategy Chart
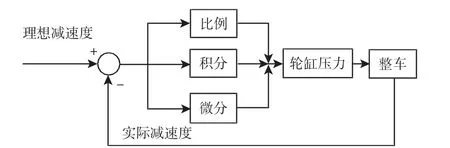
图3 PID 控制器原理图Fig.3 PID Controller Schematic
5 驾驶模拟器硬件在环试验验证
通过理论研究,建立了汽车前方防碰撞两级预警系统和自动紧急制动系统模型。自动紧急制动系统需要实现的功能是当将出现碰撞危险的紧急工况时,如果驾驶员没有进行制动,系统会自动采取制动控制,避免碰撞的发生。自动紧急制动系统有两种制动强度,一种是完全制动,一种是部分制动。为了充分验证模型的正确性和合理性,论文应用驾驶模拟硬件在环试验台对系统进行不同试验验证。工况分为三种:本车速度设为中等城市车速60上下,前方车辆设为静止、匀速、减速三种不同状态。
5.1 接近前方静止车辆
工况:本车初始速度65km/h 工况,接近前方静止车辆。仿真曲线,如图4 所示。本车以65km/h 匀速接近前方静止车辆,驾驶员不操作制动踏板,当本车与前方静止车辆的距离小于安全距离后,在第4s 车辆防碰撞系统自动进行紧急制动,在第6.5s 时车辆停止,与前方车辆还有接近2m 的距离避免了碰撞的发生。由试验结果可知,本车以一定速度接近前方静止车辆的工况时,汽车前方防碰撞系统根据汽车不同的行驶状态均实施了准确的自动紧急制动功能对车辆进行制动,避免了碰撞发生。
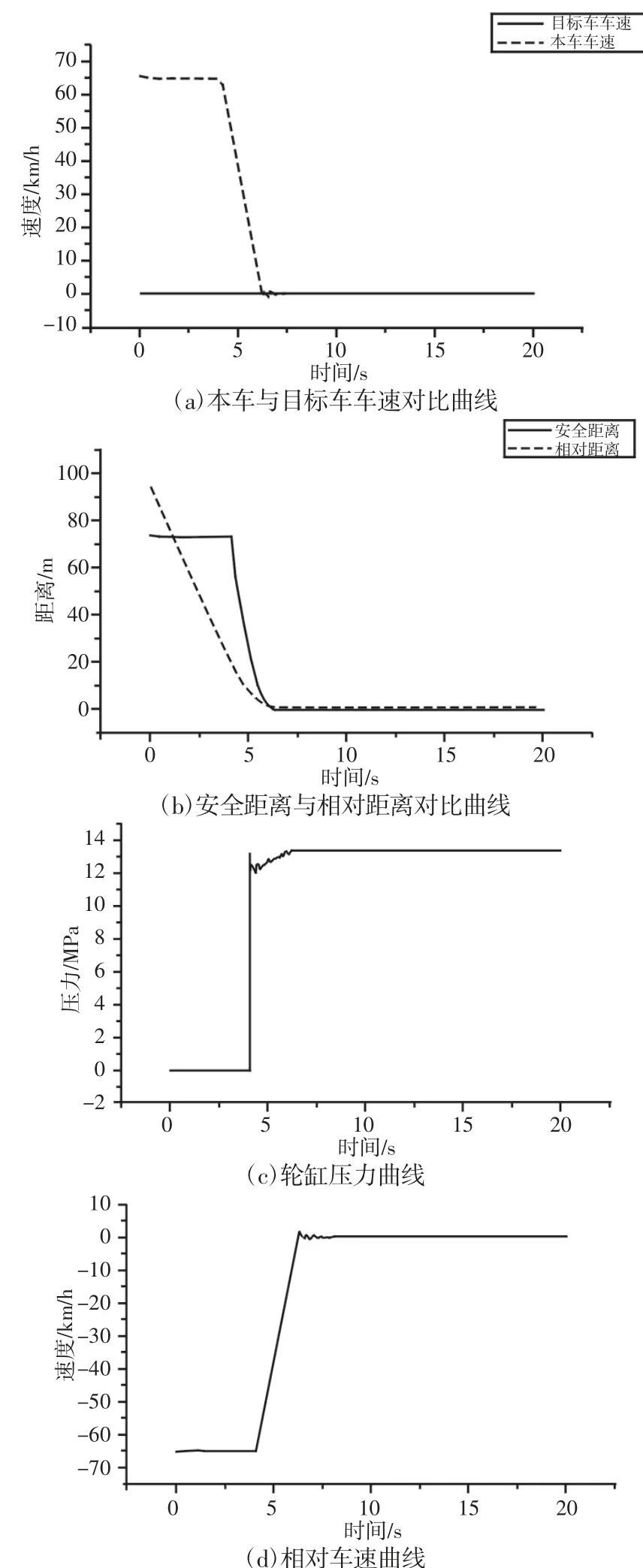
图4 本车中速接近前方静止车辆Fig.4 Vehicle Speed Close to Front Stationary Vehicle
5.2 接近前方低速车辆
工况:本车初始速度65km/h,前方车辆匀速10km/h。仿真曲线,如图5 所示。
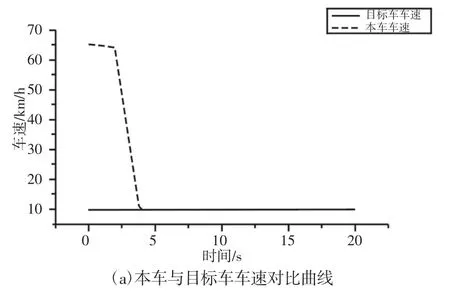
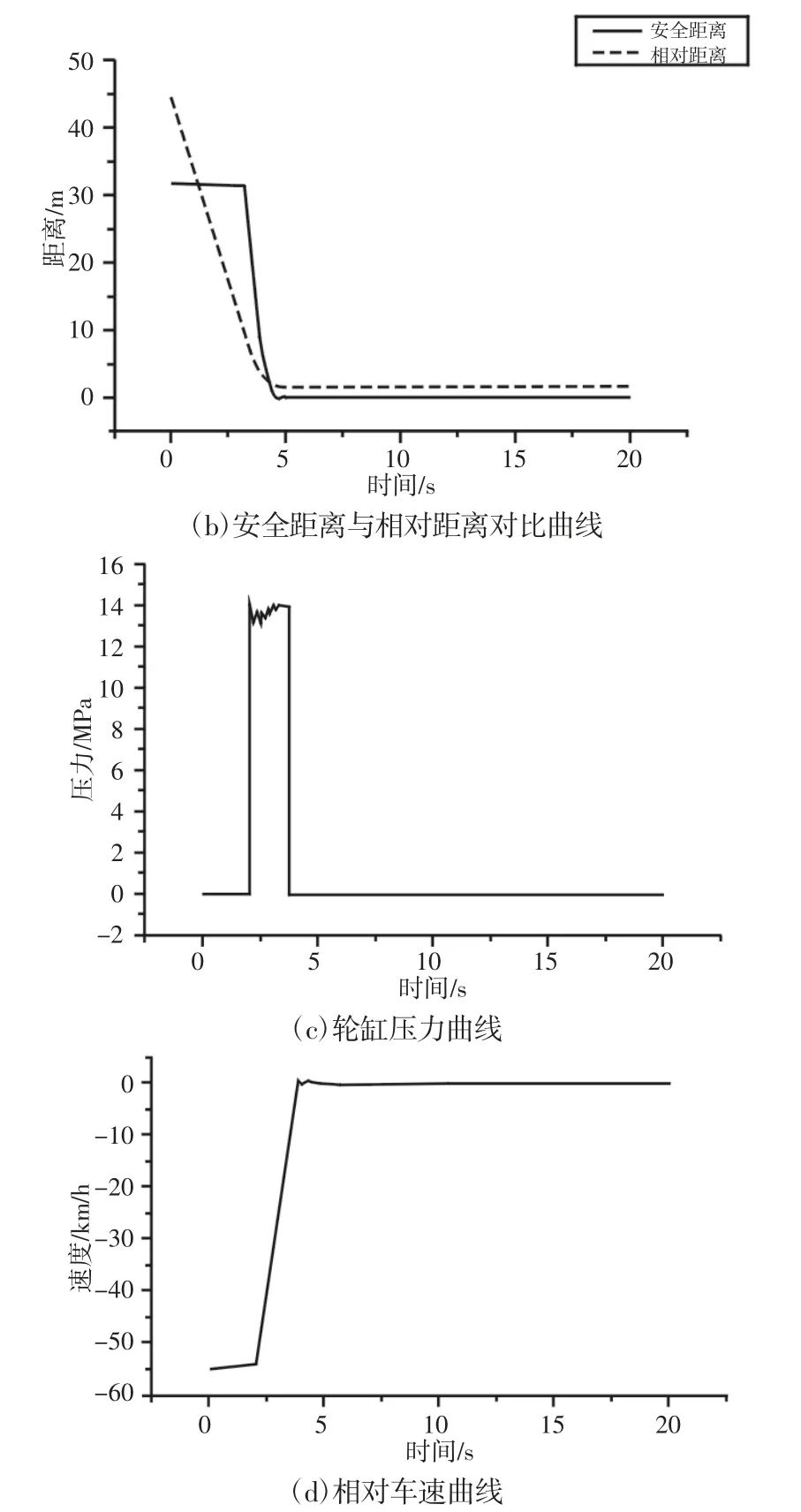
图5 本车中速接近前方低速车辆Fig.5 Vehicle Speed Close to Front Low-Speed Vehicle
本车以65km/h 匀速接近前方以10km/h 低速行驶车辆,驾驶员不操作制动踏板,当本车与前方目标车辆的距离小于安全距离后,在第2s 车辆防碰撞系统自动进行紧急制动,制动维持了2s左右,当车辆车速降为与前车速度相等,不发生碰撞时自动解除制动,与前方车辆保持一定距离继续行驶。由试验结果可知,本车以一定速度接近前方低速车辆的工况时,汽车前方防碰撞系统根据汽车不同的行驶状态均实施了准确的自动紧急制动功能对车辆进行制动,避免了碰撞发生。
5.3 接近前方减速车辆
工况:本车初始速度50km/h,前方车辆初始速度50km/h,减速度2m/s2。仿真曲线,如图6 所示。本车以50km/h 匀速接近前方以50km/h 行驶并以2m/s2的制动减速度减速的前方车辆,驾驶员不操作制动踏板,当本车与前方目标车辆的距离小于安全距离后,在第5s 时车辆防碰撞系统自动进行紧急制动,车辆在第7s时停止,与前方车辆保持一定距离,避免了碰撞的发生。由试验结果可知,本车分别以低速、中速接近前方减速车辆的两种工况时,汽车前方防碰撞系统根据汽车不同的行驶状态均实施了准确的自动紧急制动功能对车辆进行制动,避免了碰撞发生。
图6 本车中速接近前方减速车辆Fig.6 Vehicle Speed Close to Front Decelerating Vehicle
6 结论
(1)根据前车运动状态分别建立自动紧急制动系统安全距离模型,由试验数据选取驾驶员舒适制动减速度作为自动紧急制动的减速度,设计了两级自动紧急制动系统。
(2)通过试验验证,表明设计的两级自动紧急制动系统的控制策略可以很好地辅助驾驶员在碰撞发生前采取紧急制动措施,从而有效防止发生碰撞危险。
