行星轮系动态特性分析的重复超单元方法
2020-07-22胡嘉苗
姜 东,徐 宇,曹 鑫,胡嘉苗
(南京林业大学机械电子工程学院,江苏 南京 210037)
1 引言
针对行星轮系建模和分析,国内外学者开展了系统的研究工作。文献[1]以具有3 个行星轮的单级行星轮系为研究对象,针对不同边界条件的情况进行模态分析来计算系统固有频率。文献[2]建立双螺旋行星轮系的集中参数模型来研究其三维运动系统的振动模态特性,通过分析模态振型,总结了三种振动模式:行星模式、旋转轴模式和平面平移模式,体现了不同振动模式的特点。文献[3]针对小齿数差减速器的行星轮系进行动态特性分析。根据建立的动态分析有限元模型,计算了行星轮系的固有频率和模态振型,并综合考虑了内外激励和研究了其结构动态响应和加速度噪声。文献[4]提出建立考虑旋转和平移位移的两级闭式行星齿轮组的平移-旋转动力学模型,以研究动态响应和避免共振。通过分析行星轮数量和耦合刚度对结构模态的影响,将集总参数模型与有限元模型进行比较,总结出了五种模态振型。文献[5]针对行星轮系,分别建立其有限元模型和集中参数模型,采用试验的固有频率、模态振型和动态响应验证了集中参数模型和有限元模型仿真的准确性。文献[6]考虑行星轮系各齿轮副间的啮合刚度、齿侧间隙以及综合传递误差等因素,建立了行星轮系扭转振动模型。文献[7]提出了一种将有限元法和弹性接触理论相结合的齿轮啮合刚度计算方法,通过求解变形协调方程得到齿轮时变啮合刚度和齿面载荷分布。文献[8]采用集中参数法建立平移-扭转耦合动力学模型,分析裂纹扩展对时变啮合刚度的影响,研究时变啮合刚度及裂纹对系统固有频率的影响。文献[9]建立一种考虑摩擦力、时变啮合刚度及阻尼、综合啮合误差及内齿圈柔性的节点外啮合行星齿轮平移-扭转动力学模型。文献[10]研究NGW 型行星轮系中单级及两级行星轮系耦合模型的模态特性,总结出行星轮扭转振动模式、全振动模式等典型振型。文献[11]针对斜齿行星齿轮传动系统,建立了随动坐标系,推导了含陀螺效应的动力学方程,求解了系统的固有特性。文献[12]针对单级斜齿轮传动装置,建立了集中质量模型和动力学模型。文献[13]开展了子结构方法在某大型四机并联液体火箭发动机中的应用研究。研究表明,相比整体有限元分析方法及传统(单级)子结构法,其建模效率得到大幅度提高,验证了多级动态子结构法的有效性。文献[14]建立了齿轮箱传动系统和机匣结构子结构模型;根据传动子结构和箱体子结构系统变形协调条件,建立大功率风电齿轮箱系统耦合动力学模型,对系统振动响应进行计算分析。通过综述发现,行星轮系动态分析主要有理论方法、数值方法,理论方法往往需要进行较多的理想化假设来得到定性分析结果;数值方法可针对复杂的行星齿轮系统开展定量研究,但是计算量是面临的关键问题。
超单元是求解大型复杂问题的有效手段,通过把整体结构划分成较小的超单元来进行分析,将结构的特征矩阵,如质量、刚度、阻尼等在所选取的自由度上进行缩聚,然后再综合得到总体结构的动态特性。超单元不仅可单独运算,而且可与整体模型混合使用,能够在保留结构的动态特性信息上,显著提高分析效率。以行星轮系为研究对象,针对具有相同结构特点的行星轮,采用超单元方法研究简化建模方法,提高建模效率。
2 理论基础
2.1 模态综合法
从整体结构中选取一部分作为子结构,子结构的运动方程为:

式中:M和K—刚度矩阵和质量矩阵;x—位移向量;f—外力向量。
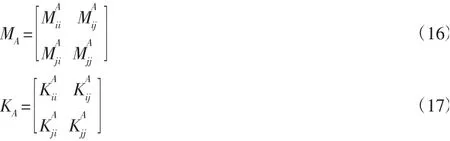
按照结合面自由度j和非结合面自由度i,将运动方程进行
矩阵分块:
我总认为自己一个人漂惯了,心肠挺硬,但是,当时我真的是眼泪在眼眶里打转,心里就一个声音——“这个世界上再没有任何一个人比妈妈好!”

式中:下标ii—子结构内部自由度的分块形式;下标jj—结合面自由度分块形式;下标ij和ji—结合面和子结构内部耦合自由度分块形式。对于求解特征值问题,在超单元子结构上除了在结合面作用约束力fj,其它部位不受力,即fi=0。假设子结构受简谐激振力fj=f0jeiωt,有位移响应x=Xeiωt;X—位移响应的幅值。式可改写为:

式中:ω—结构固有频率;f0—外力向量的幅值。
当结合面受固定约束时有Xj=0,代入式的第一个方程,给出约束界面特征值方程为:求解式广义特征值方程,将相应的子结构特征模态表示为则约束界面主模态为:


可将主模态分为保留主模态φbL和非保留主模态φbH,保留主模态的阶次远小于结构自由度。由约束界面保留主模态和全部界面自由度的约束模态Φc0组成假设模态集T0。

式中:T¯0—超单元进行第一次坐标变化的矩阵。
基于固定界面模态综合法,假设结合面为固定约束,由式忽略惯性力项可得:

解式的第一个方程,得:

其中,

静力位移X可写为:
式中:Φc0—超单元界面约束模态矩阵;I—单位矩阵。
因此,假设模态集T0可写为:

则子结构位移Xd0可表示为:

2.2 重复超单元方法
考虑到某些整体结构中具有部分相同几何结构,所以提出利用重复超单元来避免重复建模和计算规模过大的问题。多重超单元划分,如图1 所示。多重子结构法是考虑到某些结构存在部分相同几何结构,步骤可分为:(1)将整体结构划分为原始子结构A、重复子结构B、子结构C和残余结构;(2)采用固定界面综合法,对原始子结构A、重复子结构B和重复子结构C进行动力缩聚,重复子结构B、C与原始子结构A使用相同的物理矩阵进行动力缩聚,得到缩聚边界的物理矩阵(质量矩阵和刚度矩阵);(3)将缩聚边界的物理矩阵装配到残余结构,得到系统的物理矩阵,进行系统动态特性分析。对原始子结构A进行坐标变换,可得:
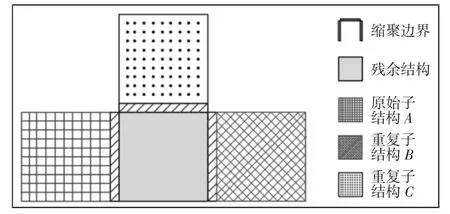
图1 重复超单元子结构划分Fig.1 Substructure Division of Repetitive Super-Element

其中,
由于子结构B、C在结构形式以及材料参数等与子结构A一致,子结构B和C的物理矩阵与子结构A相同。将子结构B、子结构C与残余结构进行装配时,仅需要考虑子结构和残余结构界面位移协调条件的坐标变换,而不需要重新建立子结构。
装配后系统的自由振动方程为:

其中,

基于重复子结构的质量矩阵和刚度矩阵可表示为:
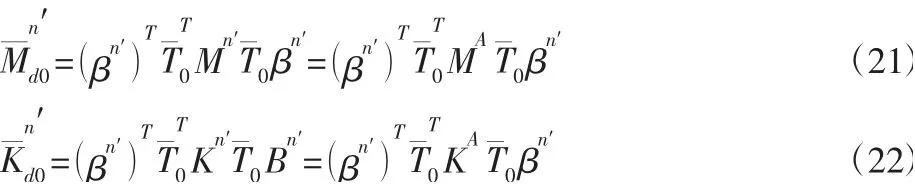
式中:n′—子结构B和子结构C;βn′—重复子结构的转换矩阵重复子结构n′的质量矩阵经过坐标变换后的质量矩阵—重复子结构n′的刚度矩阵经过坐标变换后的刚度矩阵。
3 行星轮系的动态特性分析
3.1 行星轮系建模
本算例研究对象为某行星轮系,由一个太阳轮、四个行星轮和一个内齿圈组成,行星轮系几何参数,如表1 所示。行星轮系的几何模型与有限元模型,如图2 所示。其整体结构为钢材料,弹性模量E=19000MPa,泊松比μ=0.3,密度ρ=7750kg/m3。采用商用有限元软件Hypermesh,采用四面体单元和六面体单元进行混合建模,共建立40248 个节点和28650 个单元,其中太阳轮有11496个节点和8555 个单元,行星轮有25472 个节点和20160 个单元,内齿圈有9648 个节点和5695 个单元。定义全模型为包含所有计算自由度的有限元模型。在行星轮系有限元模型的基础上,将行星轮系各齿轮的轮盘部分作为超单元,一共建立六个超单元,而行星轮系的齿轮通过弹簧单元连接,作为残余结构,完成传统超单元模型划分。
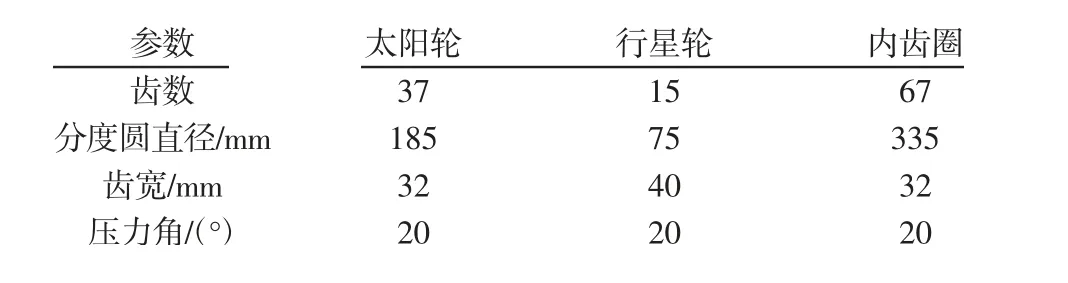
表1 行星轮系几何参数Tab.1 Geometrical Parameters of the Planetary Gear System
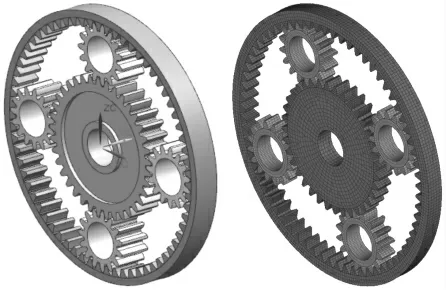
图2 行星轮系几何模型与有限元模型Fig.2 Geometrical Model and Finite Element Model of Planetary Gear System
3.2 传统超单元建模
对行星轮系进行传统超单元划分,按照实际结构几何形状等超单元划分原则进行超单元划分,将太阳轮轮盘、行星轮轮盘和内齿圈的轮盘划分为超单元,同时将所有齿轮的齿划分为残余结构,行星轮系传统超单元划分,如图3 所示。
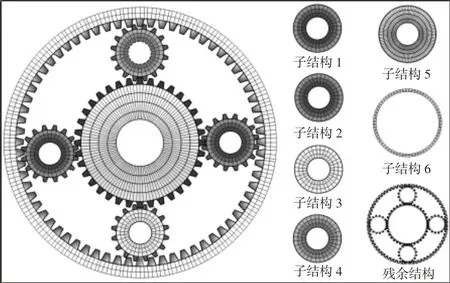
图3 行星轮系传统超单元划分Fig.3 Traditional Super-Element Division of Planetary Gear System
传统超单元法考虑的是将每个齿轮的轮盘作为一个超单元,然后分别对各个超单元进行分析,最后装配到残余结构上。重复超单元分析将每个行星轮都定义为超单元,但只划分一个行星轮的网格作为原始超单元,其余行星轮作为重复超单元,只定义外部节点,不需要划分网格,与原始超单元使用相同的刚度和刚度矩阵,避免了由网格重复划分与载荷多次施加造成的对工作量的增加与系统资源的浪费。利用重复超单元对行星轮系进行分析时,要求重复超单元与原始超单元间保证几何上的一致性。
3.3 重复超单元建模
在传统超单元建模的基础上,将齿圈和太阳轮的轮盘作为超单元,分别为超单元1 和超单元2。结合行星轮在行星轮系中的排布规律和位置关系,选择任一个行星轮轮盘作为原始超单元,其余三个行星轮轮盘作为重复超单元,如图4 所示。全模型残余结构模态振型,第1 阶到第5 阶模态振型,如表2 所示。对全模型、传统超单元模型和重复超单元模型进行自由模态分析,选取第1 阶到第5 阶的模态振型和固有频率进行比较,如表3 所示。分析表3 的频率误差可知,采用重复超单元计算依然具有较高的精度。计算时长统计,全模型平均一次固有特性分析耗时为186.18s,而采用传统超单元模型和重复超单元模型的计算耗时分别为167.85s 和154.90s,与全模型相比,计算效率分别节省了18.33s和31.28s,如表4 所示。
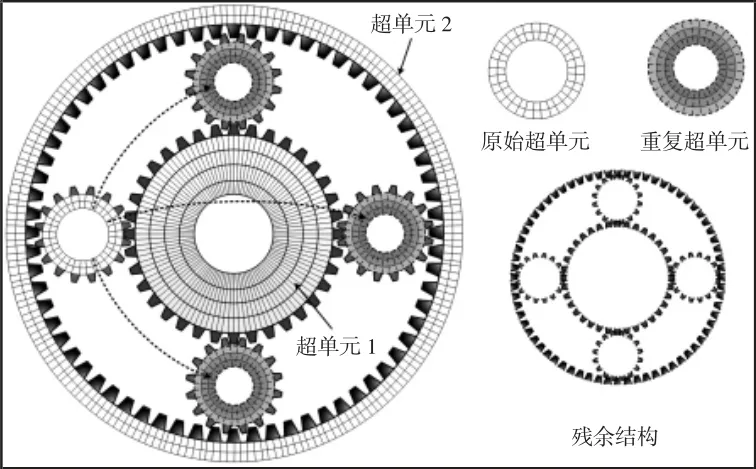
图4 行星轮系重复超单元划分Fig.4 Repetitive Super-Element Division of Planetary Gear System
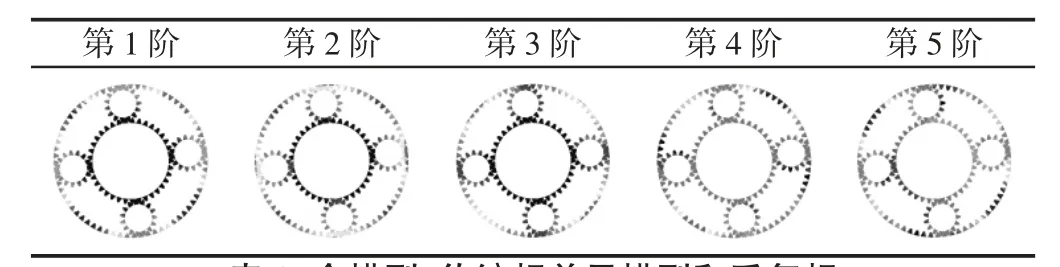
表2 全模型残余结构模态振型Tab.2 Mode Shapes of the Residual Model of the Full Model

表3 全模型、传统超单元模型和重复超单元模型固有频率误差分析Tab.3 Comparison of Modal Frequencies of the Full Model and the Super-Element Model

表4 全模型、传统超单元模型和重复超单元分析耗时比较Tab.4 Comparison of Time Consuming of Three Kind of Models
在重复超单元模型的基础上,分别均匀选取75%、50%和25%的外部节点,对全模型和选取不同数量外部节点的多重超单元模型进行自由模态分析,选取第七阶到第十一阶模态振型和其对应的固有频率,如表5、表6 所示。全模型与重复超单元模型MAC 值比较,如图5 所示。从表5 中看出,随着多重超单元模型外部节点选取的减少,多重超单元模型的模态振型与全模型的模态振型不再一致。从表6 可以看出,随着多重超单元模型外部节点选取的减少,固有频率误差逐渐变大。
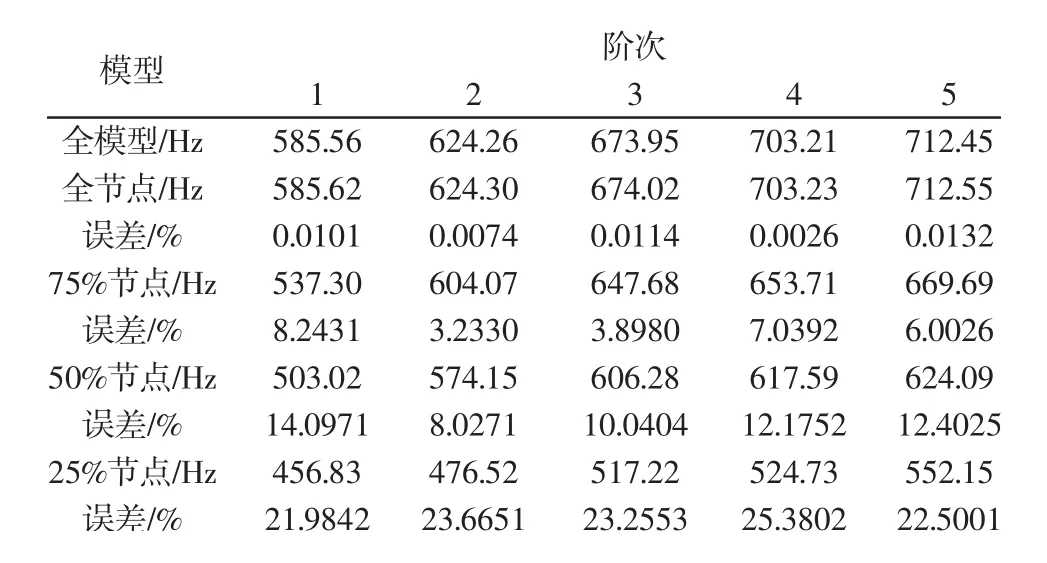
表5 全模型与不同数量外部节点的重复超单元模型固有频率误差分析Tab.5 Error Analysis of the Repetitive Super-Element Model with Different External Nodes

表6 全模型与不同数量外部的超单元模型分析耗时比较Tab.6 Comparison of Time Consuming Between Full Model and the Super-Element with Different External Node
4 结论
针对行星轮系高效率建模,提出一种行星轮系动力学建模的重复超单元方法。考虑到各行星轮具有相同的几何特征,将其中一个行星轮的有限元模型作为原始超单元,其余行星轮作为重复超单元不需要划分有限元网格,通过定义缩聚界面的外部节点可高效建立动力学模型。研究结果表明,重复超单元在保证精度的情况下分析效率更高。
