某型空管雷达信号分析及其参数优化
2020-07-22赵志国房子成金颖涛
赵志国, 丁 原, 王 雨, 房子成, 金颖涛
(1. 93534部队, 天津301700; 2. 中部战区空军参谋部, 北京 100010)
0 引言
随着民用航空的高速发展,采用全自动录取模式的空中交通管制一次雷达(以下简称“空管雷达”)受到广泛关注,国内也取得了明显进展[1-3]。近期我国引进的某型是针对空中“非合作”目标设计的新一代S波段近程空管一次雷达,能够在飞机起降时段提供出众的空中监视信息,适用于机场和航路区域的空中交通管制。该型雷达按照无人值守的要求进行设计,可以全天候、全天时完成空中监视任务。实现其优越探测性能的技术基础是其适合多种复杂应用背景的自适应信号与信息处理技术。该信号处理技术是基于开放的“软件化”理念进行设计,在商用单板计算机平台上运行。在控制终端,通过本地(或者远程)控制面板软件,可快速完成参数优化调整,有助于迅速应对工作环境和探测目标类型的变化。本文对该型雷达的信号时序及其处理技术进行分析,并给出参数优化的一般方法,以期在实际使用过程中充分发挥其探测性能,并为相关雷达的设计和论证提供参考。
1 雷达信号时序分析
该型空管雷达根据雷达天线的转动速度,将360°的方位探测范围分为若干个波束驻留时间(Time on Target,TOT)。例如,如果选择天线转速为10 r/min,则一般设置的TOT个数为182个。一个TOT被分成5个时间段(如图1所示),分别为:①自动增益控制(Automatic Gain Control,AGC),②性能监视(Performance Monitoring,PM),③偶数相参处理间隔(Coherent Processing Interval,CPI),④奇数CPI,⑤填充时段(FILL)。各个时段完成的功能如下:

图1 1个TOT时间段内的信号时序关系
AGC用于保持系统至A/D变换输入端的噪声功率水平稳定,避免系统噪声与A/D采样噪声差异过大,从而降低系统灵敏度损失或者动态范围损失。
PM用于实现系统自检,监视系统各部分的工作状态。
在相参积累处理时间段,该雷达设计采用3种不同信号,其时间长度分别是:1 μs+90 μs,10 μs+100 μs和10 μs+150 μs。其中1 μs和10 μs信号为短脉冲(Shortpulse,SP),用于近距离探测,缩小雷达近距离探测盲区。90 μs,100 μs和150 μs信号为长脉冲(Longpulse,LP),用于远距离探测。1 μs信号的波形是没有频率调制的简单矩形脉冲,10 μs,90 μs,100 μs和150 μs信号的波形是非线性调频(Non-Linear Frequency Modulation,NLFM)矩形脉冲。另外,通过在奇偶CPI内频率分集和改变调频方式,可以有效应对目标雷达截面积(Radar Cross Section,RCS)的起伏变化,降低雷达截面积(RCS)起伏对目标检测的影响[3]。
FILL用于校正天线转动速度变化,降低CPI内各相参积累脉冲幅度的起伏变化,保持天线转动对信号幅度调制模式稳定。其优点是:第一,有利于降低相参积累损失,提高目标的检测性能;第二,有助于基于幅度信息准确估计目标坐标信息,提高探测精度。
由上述分析可见,该型空管雷达的信号时序特点主要有:第一,基于CPI和TOT把方位覆盖范围分成固定的处理单元,对雷达探测的时间资源进行严格有序的管理;第二,基于频率分集和调频方式变化,保持目标RCS稳定,改善检测性;第三,基于AGC和PM精确管理接收信道,保持接收信道状态稳定,便于后续设计和调整目标检测算法。
2 信号处理分析
该型空管雷达的信号处理流程如图2所示。总体上,其信号处理流程分为两部分:一是前端快时间处理,包括AD变换(Analogue to digital conversion,ADC)、数字下变频(Digital Down-Conversion,DDC)、AGC、数字脉冲压缩(Digital Pulse Compression,DPC)和波束选择。二是气象或者目标通道的慢时间处理,对于目标通道,主要包括动目标检测(Moving Target Detection,MTD)、过门限检测(Detection,DET)和多普勒频率计算(Doppler,DOP)。

图2 信号处理流程
该型空管雷达的信号处理的主要特点如下:
第一,在一次混频的基础上,采用高采样率完成信号的数字化处理。在一次混频之后,通过对载频为255 MHz的中频信号进行300 MHz采样,结合数字下变频,获取零中频数字信号。与常规信号接收与处理流程相比,其优点主要有两个方面,一是减少了1次(或者2次)模拟信号混频处理环节,有助于降低接收机噪声系数,提高接收机的灵敏度,同时这也提高了接收链路的可靠性;二是采样频率高,基于“过采样”技术有效降低采样噪声。根据AD变换理论,对于该型雷达带宽为1.25 MHz的信号,与2.5 MHz的采样频率相比,采用300 MHz的采样频率进行采样,在理论上可获得的信噪比改善值为20.8 dB[4]。
第二,在常规模拟波束选择方法的基础上,增加了数字波束选择(如图2所示波束选择)功能,实现高低波束选择。在目标处理通道和气象处理通道,为在不同距离段选择高波束信号或者低波束信号,从而达到降低杂波和提高目标探测性能的目的,该型雷达设置了两种波束选择方式,即模拟波束选择和数字波束选择,其主要优点和缺点如下:
模拟波束选择的优点是:在线极化和圆极化的情况下气象处理通道均可用,可实时输出气象信息。其缺点是:(1)在只有一个主处理控制通道(Processing & Control Channel,PCC)的情况下,不能实现高/低波束选择;(2)在波束选择的过程中,接收系统在灵敏度和虚警概率等方面的性能下降。数字波束选择的优点是在波束选择的过程中,接收系统在灵敏度和虚警概率等方面的性能受到的影响很小,有利于提高对小型目标探测性能。其缺点是在圆极化方式和只有一个主PCC的情况下,气象处理通道不可用。因此,如果雷达的主要任务是探测空中飞行目标,则选择使用数字波束选择;如果在一些特殊的情况下(如遇到极端恶劣天气),则选择使用模拟波束选择,以获取实时气象信息。
第三,采用基于正切型NLFM信号的数字脉冲压缩和与之相匹配的距离旁瓣信号检测技术。
该型雷达采用的是正切类型的NLFM信号。根据其技术手册,数字脉冲压缩后的主副瓣比应大于45 dB。实际测试值大于50 dB。这能够较好地控制强回波距离副瓣对弱小目标的遮蔽。因为以民用航空器为主要探测对象,飞行速度一般在1马赫以内,该类型的NLFM信号能够较好地满足多普勒容限要求。
从实际使用的角度出发,利用雷达的测试信号和雷达维护监视终端(Radar Maintenance Monitor,RMM)输出视频选择功能,本文测试了该正切型NLFM信号的副瓣分布特征。基本参数设置为:雷达产生150 μs NLFM测试信号,距离位于60 nmile,方位为0°~360°,信号幅度由本地控制软件的测试信号衰减值决定;选择RMM输出MTD的输入视频信号,以避开检测门限的影响。所得测试结果如图3~图5所示。当测试信号的衰减值为96 dB时,其结果如图3所示,此时显示的是测试信号脉冲压缩之后的主瓣位置,即60 nmile,对应的检测概率约为80%。将测试信号的衰减值降低至39 dB,在原有主瓣实线圆环的内外两侧各出现1个虚线圆环,在RMM显示3个圆环,对应的检测概率约为40%,局部图如图4所示。两个虚线圆环为NLFM信号经过DPC后出现的距离副瓣。其中,较近的距离副瓣产生的内部虚线圆环距离为47.7 nmile,与主瓣的距离为12.3 nmile;较远的距离副瓣产生的外部虚线圆环距离为71.8 nmile,与主瓣的距离为11.8 nmile。两个距离副瓣之间的距离为24.1 nmile(理论值为24.2 nmile)。将测试信号的衰减值降低至27.5 dB,结果如图5所示。两个幅度最大的副瓣圆环的宽度变化很小,主瓣附近的副瓣明显增多,其占据距离宽度约为4 nmile。

图3 RMM显示结果-局部图(测试信号衰减值为96 dB)

图4 RMM显示结果-局部图(测试信号衰减值为39 dB)
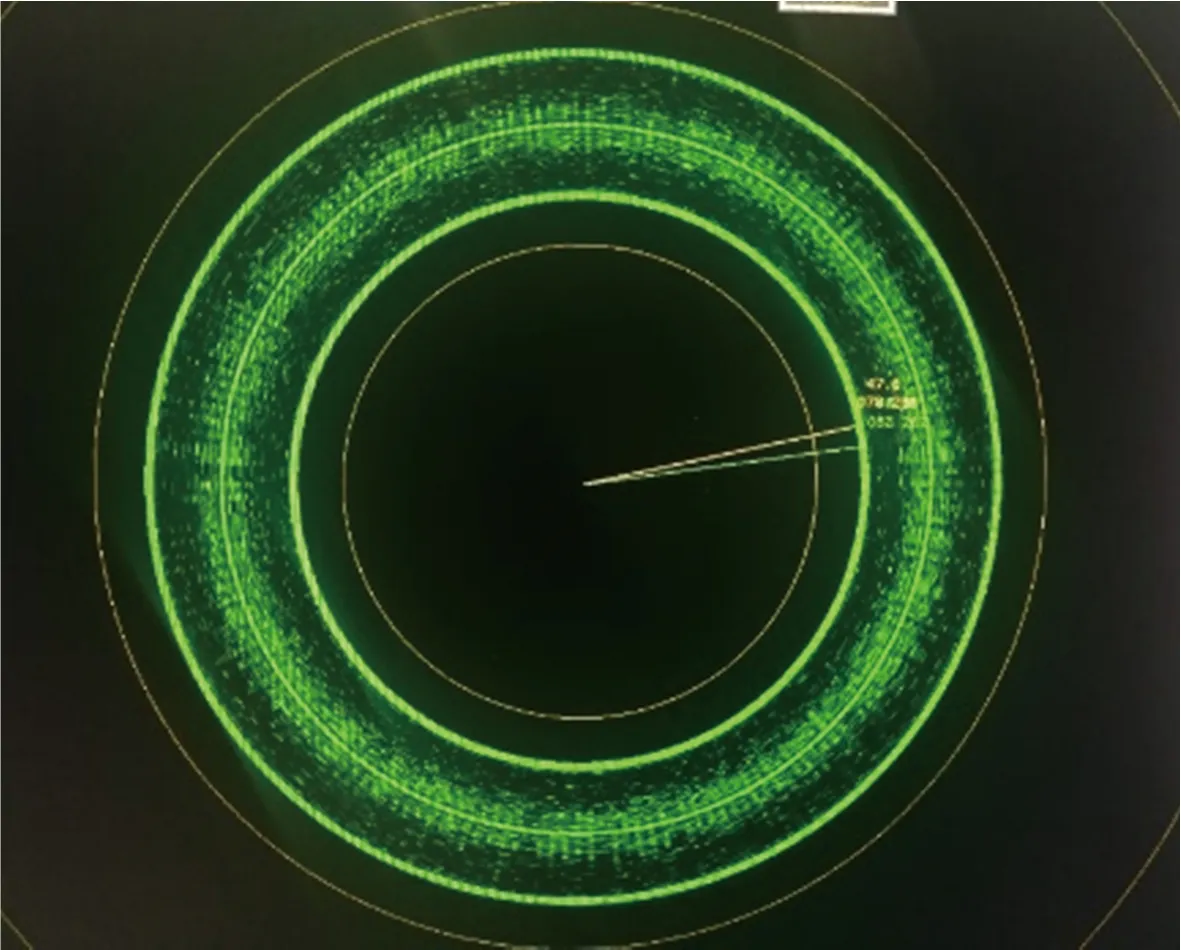
图5 RMM显示结果(测试信号衰减值为27.5 dB)
上述测试结果表明,正切型NLFM信号在其特殊的DPC算法之下,在距离旁瓣区域的两端,即与主瓣最远的位置,出现最大距离旁瓣。常规雷达脉冲压缩处理后的旁瓣都是随着与主瓣距离的增大而逐渐降低。这是与常规脉冲压缩信号及其脉冲压缩方法的主要差异。
考虑到实际的主副瓣比大于50 dB,所以一些幅度非常大的回波信号在最大副瓣位置易产生虚警,或者遮蔽其他运动目标。针对这一问题,基于杂波和干扰的检测与分类理念,该型空管雷达设置了强目标回波检测算法,若检测到强回波信号,由此控制选择使用恒虚警检测方法,消除由距离旁瓣产生的虚警[5]。
第四,采用软件化设计,实时监测并显示系统参数,并开放参数调整权限。基于单板计算机,雷达信号处理和时序控制分别用LINUX系统下的软件实现。信号处理、时序处理、数据处理、本地/远程控制终端、本地/远程维护与监视终端等子系统之间用网络连接。在本地控制终端,通过控制面板软件可实时监测系统运行参数、视频管理参数、状态监视参数、时序控制图、信号处理图、维护类参数和自检状态等。同时,系统运行参数、视频管理参数、时序控制图、信号处理图和维护类参数等各类可调参数,共计659个,可通过控制面板软件进行快速调整。这有助于雷达在各类地理环境和电磁环境下,完成多种探测任务。
3 参数优化
为充分发挥该型引进空管雷达的探测效能,用户需要根据其主要探测任务和雷达周边的地理环境与电磁环境,对雷达参数进行优化调整。根据该型空管雷达信号及其处理方法的特点,本文给出以下参数优化基本方法。
第一,根据干扰分布情况和周边S波段频率使用情况选择工作频率F1和F2,根据雷达系统理论,对于Swerling Ⅰ型目标,如果目标的物理长度为L(m),则F1和F2之间的最小频率间隔为150/LMHz[6]。对于长度大于6 m的飞机,25 MHz的频率间隔将完全保持双频工作的得益。
第二,根据仰角波束覆盖范围和杂波强度设置天线波束指向角和高/低波束选择图,并根据主要探测任务和气象信息的需求确定选择模拟波束选择或者数字波束选择方法。
第三,根据监控终端显示的接收系统饱和分布情况,并兼顾后续检测概率和虚警概率状态,针对长脉冲和短脉冲分别在各个方位扇区内设置STC。
第四,优化调整检测门限。雷达可供选择的门限主要有固定低/高门限、精细多普勒低/高门限和恒虚警低/高门限。雷达主要是根据各待检测方位-距离单元的MTD权值选择图状态、杂波监测图状态、强目标监测图状态在各类检测门限之间作出选择,同时根据虚警概率监测控制图的状态在各类低/高门限之间自适应作出选择。若个别区域的检测概率或者虚警概率不符合探测需求,通过检测准则控制图,并结合STC控制图,在个别区域设定具体检测门限,使得区域内的检测性能满足探测需求。
第五,根据杂波、干扰和异常传播等监测功能,进行杂波和干扰分类,自适应选择MTD滤波器组、反异步干扰功能和反异常传播功能。打开或者关闭相应功能,可进一步控制虚警概率。
第六,在设置各种控制图的过程中需要注意各类图的最小处理单元差异,避免因为处理单元的位置重叠引起处理冲突,限制了系统的探测性能。例如,检测准则控制图的一个距离最小处理单元为16个距离分辨单元,而虚警监视图的距离处理单元为32个距离分辨单元。所以当两种控制图重合时,强制使得检测准则控制图扩展,从而满足32个距离单元的处理需求。这使得部分重叠边缘区域的检测门限变大,检测概率降低。
4 结束语
本文对某新型引进S波段空管雷达的信号时序及其信号处理方法进行了分析,总结了该型空管雷达信号处理方面的新特点,并根据该雷达的信号处理技术流程和特点给出了参数优化基本方法。该型空管雷达的新特点对于国内空管雷达等雷达设计与论证具有一定参考意义。给出的参数优化基本方法有助于提高该型雷达操作人员和技术人员的实际操作能力,从而充分发挥雷达的探测效能。
