弹道导弹群目标跟踪分裂算法研究
2020-07-22靳俊峰廖圣龙
靳俊峰, 曾 怡, 廖圣龙
(1.中国电子科技集团公司第三十八研究所, 安徽合肥 230088;2.孔径阵列与空间探测安徽省重点实验室, 安徽合肥 230088)
0 引言
对武器系统来说,为实现弹头目标动能拦截,需要在大气层外60 km甚至更高位置即完成目标稳定跟踪、拦截计算、导弹发射等工作,否则拦截高度过低时来袭弹头的速度过大,拦截弹速度若低于来袭弹头,拦截效果较差。对预警系统来说,若弹头群目标分裂过早,即弹头群内目标相对距离还很小时即对群内目标进行单独跟踪,会经常出现混批、错批现象,降低目标跟踪精度、浪费传感器资源,给后续的目标识别、轨道外推等带来很大难度;若弹头群目标分裂过晚,采用群质心跟踪时弹头目标的识别、轨道推算时间会过晚,导致武器系统错失拦截的最佳窗口。因此如何解决群目标尽早分裂与群内目标关联正确率之间的矛盾是导弹防御系统的核心问题。
迄今为止已经有很多群目标跟踪算法,基于贝叶斯框架的空间群目标跟踪技术[1]在分析空间目标运动特征的基础上构造能够描述“群”的运动特征参数和结构变量,在贝叶斯框架下对群目标进行跟踪,相对无群中心时提升了目标数目估计的稳健性,但该算法主要考虑了空间群目标,且MCMC-Particle算法建模复杂、计算量大;基于群目标的多目标概率数据关联算法[2]采用等效回波及其统计中心为量测,并将跟踪空间中任一关联门内的所有回波看作一个群,通过关联门是否较差、多少回波位于关联门交叉区内的判别及其相对于不同关联中心概率的计算,确定交叉区域内回波的归属;基于UKF滤波的可变多模型(VUF)跟踪方法[3]采用多模型的结构适用于跟踪任意阶段的弹道导弹,有效提高了跟踪精度,降低了计算复杂度;基于多假设的群目标跟踪算法[4]利用多假设处理复杂数据关联问题的能力,对群中的单个目标形成假设航迹,保证跟踪稳定性。此外,机动群目标跟踪算法研究[5]、基于空域法的UCAV群目标编群策略研究[6]和基于相对位置矢量的群目标灰色精细航迹起始算法[7]等也从群的划分、群质心的计算、基于空域进行目标编群、群起始等角度对群目标跟踪问题进行了研究。
以上算法均从群中心计算、群目标关联、弹道目标滤波等角度进行弹道导弹群目标跟踪技术研究,对于何时进行群目标分裂、分裂后如何维持稳定跟踪及如何降低群内目标错误关联概率甚少涉及,且群内目标会由于相互遮挡导致检测不稳定,给群分裂带来更大难度,而该问题是目前导弹防御系统中亟待解决的问题。本文从群目标的形成与分裂过程、IMM-UKF框架、最优分配算法等角度进行问题建模分析,分析了影响群目标分裂的各种因素,结合最近邻思想和极大似然函数算法,提出了基于IMM-UKF的弹道导弹群目标分裂算法,采用Pareto改进算法进行了多目标规划问题求解。仿真和实测结果表明,该算法能够达到群目标尽早分裂与群内目标关联正确率之间的平衡。
1 群目标跟踪
1.1 群目标形成及跟踪
群目标跟踪是一种复杂情况下的多目标跟踪,目前主要有以下三种形式:
1) 群跟踪,无单个航迹:计算群信息,无群内航迹信息;
2) 群跟踪,加简化的航迹:计算群信息,并在群内维持简化的航迹;
3) 单独航迹跟踪,加群信息:维持各个目标单独的跟踪航迹,群信息用来补充。
在弹道导弹防御中,预警时间有限,需要完成导弹轨道定轨、发落点计算、目标分类识别、威胁度排序及拦截打击等一系列复杂工作流程,必须尽早、尽可能地保证对单个目标的高精度稳定跟踪。群目标质心跟踪方法无法保证跟踪精度,会影响弹道推算及发落点预报;目标的RCS起伏特性也被群质心取加权平均淹没,无法进行准确的目标分类识别。
鉴于弹道导弹群目标跟踪的复杂性,本文采用“单独跟踪航迹加群信息”的群目标跟踪方式处理密集回波时的跟踪问题。
群目标跟踪架构如图1所示,过程如下:
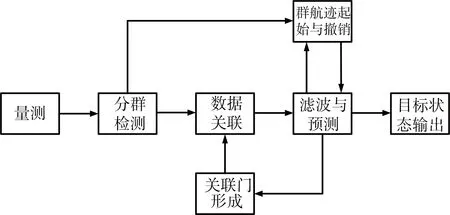
图1 群目标跟踪架构
1) 接收量测进行分群检测;
2) 分群完成后对群航迹进行关联门计算,形成量测-航迹分配矩阵;
3) 采用最优分配算法进行量测-航迹分配计算;
4) 对分配最好的量测-航迹配对进行滤波预测,并对群信息进行更新;
5) 与群内航迹未关联上的回波,根据群分裂距离判断是否起始新航迹,更新群信息;
6) 对航迹采用IMM-UKF滤波算法进行滤波平滑,对连续丢点群航迹进行航迹撤销;
7) 输出目标信息,显示群信息及群内航迹。
1.2 IMM-UKF框架
为进行弹道目标关机点判别、加速度估计、再入大机动跟踪,需要考虑多运动模型框架,利用跟踪过程中某些参数的异常变化进行特征事件的检测。交互多模型(Interacting Multiple Model,IMM)[8]算法是处理多模型跟踪的主流方法,其基本思想是:假设一个模型集合Μ作为任何时刻目标真实模型的可能候选;运行一系列子滤波,而每个子滤波都是基于Μ中一个确定的模型;基于这些子滤波的结果,按照某种原则产生目标状态的整体估计。
鉴于弹道目标运动和测量模型的非线性,本文采用UKF进行状态估计。UKF以UT变换为基础,采用卡尔曼线性滤波框架。它通过选取一些确定的采样点,更好地近似随机变量经非线性变换以后的均值和方差,从而减少了因非线性系统线性化所产生的误差,并且避免了对非线性函数求导的麻烦。
IMM-UKF的基本框架[9]如图2所示。本文中并未使用文献[3]中提出的可变多模型方法,而是使用了弹道动力学模型、当前统计模型、匀速运动共三种固定模型的组合,可变多模型需要根据模型、概率、目标高度和速度方向动态选择模型集合,在跟踪过程中需要不断对各种模型进行初始化,且弹道目标机动性很强,模型的选择容易出错。三种固定模型计算量并没有大幅度增加,减少了模型选择出错概率。

图2 IMM-UKF框架
1.3 群内目标数据关联算法
为解决群内密集目标的关联问题,采用文献[10]提出的最优分配算法,量测与航迹建立全局关联分配矩阵,充分利用目标散布特性,并基于大数据分析隶属度权重,采用最优分配算法进行点航迹配对。关联概率大小取决于特征向量的隶属度和权向量,通过归一化模糊评判向量U和权向量W构成综合隶属度评判函数,航迹i与量测j的目标关联概率为
(1)
关联概率dij若小于阈值Pth,则认为航迹i与量测j无法关联,在关联矩阵中取值为0;若大于Pth,则可用于构建基于综合隶属度函数的关联矩阵IM:
(2)
式中,n表示航迹数,m表示量测数。该算法通用性和扩展性较好,且对群内目标关联正确率达到95%以上,适合群目标分裂后的关联。
2 群目标分裂算法
2.1 问题描述
文献[11]对空间密集多目标进行了理论分析,将数据关联区划分为无错误关联区(Unambi-guous Association,UA)、不稳定区域(Unstable Region,UR)和有错误关联但航迹跟踪稳定区(Misassociation Without Track Loss,MWTR)三类区域,如图3所示。目标间距大于5倍的标准差为UA区域,2~5倍之间为MWTR区域,2倍以下为UR区域。

图3 多目标数据关联区域图
UA区域内目标由于间隔足够大,不会发生错误关联,群间目标因空间位置间隔较大位于UA区域;UR区域内目标错误关联经常发生,导致跟踪不稳定,会频繁删除航迹,航迹跟踪精度很差,群目标分裂过程中会位于UR区域;MWTR区域内航迹关联会出错,且航迹个数少于实际的目标个数,但航迹不会因为关联错误发生删批,群内目标未分裂前位于MWTR区域。UR区域随着采样周期增大而增大,UA区域和MWTR区域随着采样周期减小和检测概率提高而增大。群目标分裂的关键在于如何减小UR区域持续时间,使得分裂出的新目标尽快位于UA区域。
由于群目标飞行密集特性,传感器对群目标的一次波束照射会完成多个群内目标的检测,形成多个量测信息。假设此时群内仅有一批目标独立跟踪,该单独跟踪航迹会选择一个综合隶属度最大的量测进行数据关联和滤波,其余的检测用于形成暂时航迹。此时群目标分裂算法核心在于选择分裂距离,使得暂时航迹可以形成群内单独跟踪的航迹,该问题可描述如下:

(3)
给定传感器和群目标跟踪场景时,即确定了目标个数n、TG、采样周期τ、检测概率PD,以及量测误差σr、σβ、σγ。
该算法不仅限制于一个群目标,对于多个群目标问题可通过分群算法划分为单个子群,最终简化为单个群目标的求解。
2.2 问题求解
群目标分裂算法需要找到一个分裂距离区间使得目标函数最优,求解过程中会与检测概率、采样周期、目标位置、量测噪声、滤波器收敛性能、数据关联算法正确性等诸多因素相关,是一个典型的多目标规划问题。
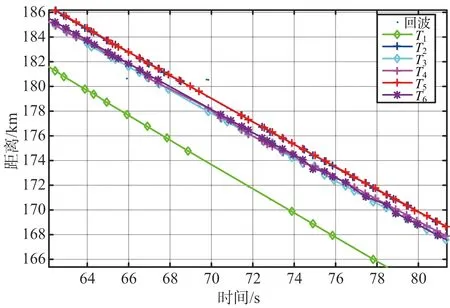
对于多目标规划问题,记它的变量可行域为S,相应的目标可行域Z=f(S),给定一个可行点x*∈S,若∀x∈S,有f(x*) 为找到群目标分裂距离的Pareto最优解,采用Pareto分析法,又称为ABC主次因素分类法。根据影响目标函数的主要特征,进行分类排队,分清重点和一般。 ABC主次因素分类法分为5个步骤: 1) 针对不同的分析对象和分析内容,收集有关数据; 2) 对各数据进行统计汇总; 3) 编制ABC分析表; 4) 绘制ABC分析图,了解各个影响因素比重; 5) 确定重点需要调整的参数。 Pareto改进是指一种变化,在没有使任何目标函数变坏的前提下,使得至少一个目标函数变得更好。一方面,Pareto最优是指没有进行Pareto改进的余地状态;另一方面,Pareto改进是达到Pareto最优的路径和方法。该求解算法需要迭代运行多次才能找出最优解,无法用于实时目标跟踪,解决办法为通过离线数据训练出特定采样周期、检测概率、量测噪声下的多组分裂距离次优解,传感器在实时跟踪时根据参数选择相应分裂距离即可,可事后结合实测数据进行分裂距离调优。 假设雷达的距离测量误差σr=30 m,方位测量误差σβ=0.2°,仰角测量误差σγ=0.2°,发现概率PD=0.8,虚警概率Pf=1×10-6,杂波分布服从泊松分布,滤波器采用基于弹道导弹动力学、当前统计模型和CV模型混合的UKF滤波方法,群内目标数据关联算法采用最优分配算法[10]。四批目标再入飞行场景,一个弹体目标、一个弹头目标加两批假目标伴飞,4个目标距离间隔在200~ 1 200 m之间,速度从1 400 m/s变化为1 950 m/s、数据率为1 s,目标从240 km运动至150 km,飞行时长为100 s。 在此情况下,按照文献[11]中的分析结果,3个目标间隔达到5倍测量误差即距离150 m时即可位于稳定跟踪区域,但对雷达测量数据来说,此时3个目标的仰角和方位间隔达不到5倍测量误差,且弹道滤波需要在地心系中进行模型计算,耦合了距离、方位、仰角三个维度误差,目标回波会交叠在一起,航迹跟踪波门会相互重叠。 经过对仿真数据分析,三批目标在距离上相对位置比较固定,角度上无法分辨,航向、速度、RCS值等参数比较接近,因此在权向量选择上归一化距离特征具有最大的权重,达到了0.7,而其他特征由于无法区分目标,仅占比0.3,权向量的参数选择可通过学习或者先验知识获取,提高了关联矩阵建立的灵活性。 图4是按照Pareto方法离线计算最优分裂距离为608 m时,群内4个目标并列飞行时的跟踪航迹。4个目标原始回波有互相遮挡现象,部分位置也存在虚警,4个目标都有自己独立的航迹,在复杂情况下仅在检测丢点时发生了一次交叉,表明该算法可以计算出最优分裂距离,即能保证群内目标尽早分裂,又能保证群目标关联正确率最好。 图4 四批目标IMM-UKF最优分裂跟踪结果 图5为采用减小的最优分裂距离400 m进行跟踪,可以看到群内6个目标并列飞行,虽然跟踪时长较长,但T2与T5、T3与T6间关联交叉次数明显较多,跟踪质量下降,尽早分裂没有带来跟踪性能提升。 图5 减小最优分裂距离为400 m后跟踪结果 实验表明,基于IMM-UKF框架的群目标分裂算法能够计算出最优的分裂距离,按照该分裂距离可实现对群内单个目标尽早独立跟踪,在实际应用中具有重要意义。因为弹道导弹突防时雷达探测回波中有大量相互靠近目标,雷达要精确跟踪20 s以上,才能得到有效的发落点预报;同时要继续通过运动特性、几何特性、光学特性等不断地进行目标识别、威胁排序,随后进行拦截打击,整个过程只有几分钟。通过尽早对单个目标进行跟踪,可提前完成发落点预报、弹头识别,为拦截赢得宝贵时间。 弹道导弹目标为突防需要,通常在飞行中段会释放多批诱饵、干扰机等形成群目标进行伴飞。由于群内目标之间空间相互靠近,运动特性相似且相对速度较小,因此需要较长的飞行时间积累才能在空间上完全分开,甚至到再入段才能由于质阻比不同在空间上完全分开。对武器系统来说,越早完成群目标分裂,跟踪时长越长,武器准备时间就越充分,但另一方面如果群目标分裂过早,在跟踪过程中极易发生混批、错批等问题,影响测量精度,浪费雷达资源,也无法稳定进行轨道推算、目标识别等工作。 本文提出了基于IMM-UKF的弹道导弹群目标分裂算法:首先分析群目标的形成及跟踪策略,论述了IMM-UKF滤波框架和群内目标数据关联算法,然后对群目标分裂算法进行了数学建模,分析了影响群目标分裂的各种噪声因素,最后提出了基于IMM-UKF框架的弹道导弹群目标分裂算法,并采用Pareto 改进算法求得分裂距离最优解。仿真结果表明,该算法能够达到群目标尽早分裂与群内目标关联稳定度之间的平衡。 在实际应用中,群目标分裂算法并不能孤立使用,而是需要综合考虑群目标管理策略、滤波器跟踪稳定性、传感器测量噪声等因素,通过对多次测量数据的事后分析来统计逼近最优解的分裂距离。3 性能评估

4 结束语
