基于Deeplabv3网络的飞机目标微动信号分离
2020-07-22付耀文张文鹏
卢 廷, 付耀文, 张文鹏, 杨 威
(国防科技大学电子科学学院, 湖南长沙 410000)
0 引言
空中飞机目标按照工作原理和用途可以分为直升机、螺旋桨飞机、喷气式飞机三种。这三种空中目标回波信号中机身分量占据主要能量,微动分量所占比重较小,找到合适的信号分离方法来得到微动分量,突出不同微多普勒调制的差异是微动特征提取的一个难点。
雷达目标的微多普勒反映了目标的精细结构和微运动,是雷达目标识别的重要依据。空中三类飞机目标的回波包含来自旋转部件的微动分量和机身的主体回波。针对飞机目标喷气引擎调制(Jet Engine Modulation,JEM)特性,王宝帅使用经验模态分解(Empirical Mode Decomposition,EMD)的方法将喷气式飞机和直升机目标的微动成分和机身分量分离[1]。加拿大渥太华防御技术中心Thayaparan提出多级小波分解目标多分量回波信号,分别得到直升机的机身回波、主旋翼回波和尾旋翼回波[2]。
近几年,深度学习在计算机视觉应用最为广泛,着重解决了分割、检测、识别、跟踪这几个问题。其中,图像分割是从像素级别理解图像,获得每个像素所对应的目标类别标签[3]。深度学习方法用于图像语义分割最早由加州大学伯克利分校的Long等人于2015年提出的完全卷积网络(Fully Convolutional Networks,FCN)[4],将原有的卷积神经网络(Convolutional Neural Network,CNN)结构中的全连接层去掉后进行图像的密集预测。2017年,Chen等人提出了Deeplabv3[5]将多个带孔卷积模块进行级联,构成一个端到端的图像分割网络,改善了特征图的分辨率。
基于深度学习方法进行图像语义分割主要有以下特点:原始图像作为网络的输入,避免了传统图像处理方法中复杂的特征提取过程,可实现图像语义信息的自动提取。传统的图像处理方法,主要采用图像浅层信息,有很多人工选择处理上的误差[6]。深度学习方法通过逐层对原始图像进行特征学习,自动学习图像深层次的特征信息,语义分割效果更加明显。
本文从飞机目标时频图像素差异着手,提出一种基于深度学习语义分割网络Deeplabv3与逆短时傅里叶变换(Inverse Short-Time Fourier Transform,ISTFT)的分离框架,完成飞机目标时频图的机身、旋转部件的信号分离,实现微动信号提取和还原。
1 飞机目标微动信号时频图构建
设常规的窄带雷达发射信号为x(t)= exp(j2πf0t),其中f0为雷达发射信号载频。带有旋转部件的飞机目标,其雷达回波信号主要由机身和旋转部件回波构成。建立飞机旋转部件相对于雷达的几何关系图,如图1所示。
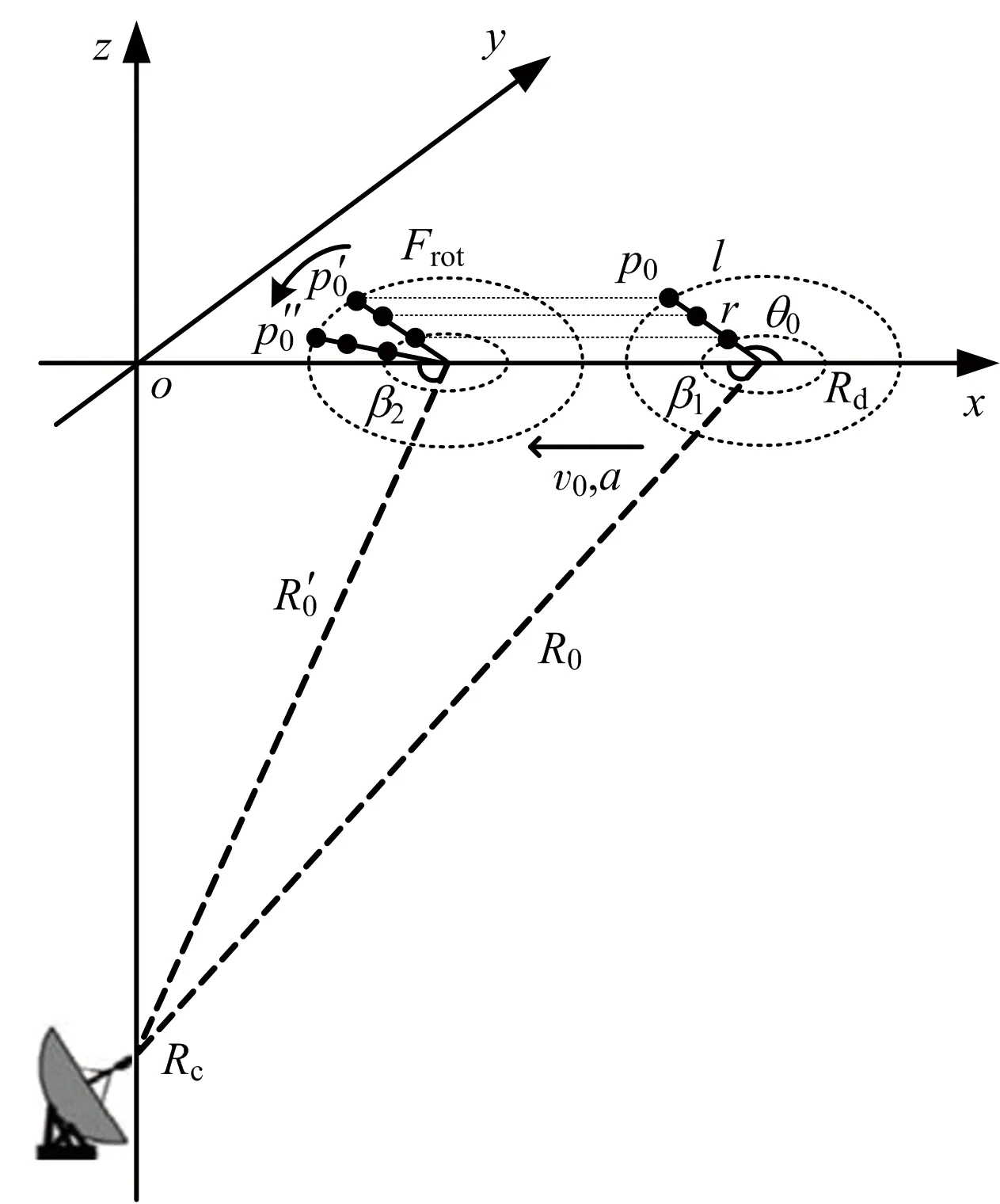
图1 旋转叶片相对雷达几何关系图
在远场和雷达波长较大的条件下,旋转部件桨片可以等效为一个长度为l-r的理想线源,以一定速度绕叶毂中心点旋转。图1设相对雷达位置Rc(0,0,-rc)的旋转叶片L上任一点p0到旋转叶片中心Rd(rd,0,0)的距离为xi(r≤xi≤l,r为桨叶根部到旋转叶片中心的长度,l为旋转叶片顶端到旋转中心的长度), 初始时刻叶片与x轴正向夹角为θ0。一段较短的时间内叶片上任意一点p0跟随机身以速度v0,加速度a,沿水平方向平移行到p′0。同时p0点在旋转面以角频率Fr作转动,最终运动到p″0。旋转部件某一点在时刻t的回波信号为
si(t)=exp(j2πf0(t-τ(t)))
(1)
式中,延迟时间为
(2)
式中,R0为飞机旋转叶片中心距离雷达相位中心的距离,β为俯仰角,随着飞机的水平飞行,其值β=arcsin(rd-v0t-0.5at2/R0)。可以看到在波束驻留时间较小时,β值近似为不变,飞机运动方向近似为正对着雷达波束方向。
对接收到的雷达回波进行混频后,可得到旋转叶片上一点p0的基频回波信号为
si(t)=exp(j4πf0·
(3)
回波的相位φi(t),旋转叶片上一点p0的多普勒频率定义为

4πFrxisin(θ0+2πFrt)cosβ/λ-
(4)
去掉平动和基频的影响,多普勒频率近似化简为
(5)
旋转部件整个叶片在匀加速运动情况下,回波信号为
si(t)=(l-r)·
(6)
式中,β为俯仰角。雷达发射信号的波长为λ,桨叶数目为N,相应n=0,1,2,…,N-1。
式(6)中飞机旋转部件幅度分量受sinc函数的调制,决定回波信号的时域特征。当叶片旋转到垂直于雷达视线时,时域上出现闪烁尖峰。时域尖峰间的时间间隔,即频闪间隔Δt=2π/2πkNFr=1/kNFr(在N为奇数时k=2,N为偶数时k=1)。叶片在时域上出现闪烁尖峰的时刻,叶片受雷达照射的强度最大,叶片上的每个散射点均会产生微多普勒频率,此时在频域就会产生cosβ4πFrr/λ~cosβ4πFrl/λ的闪烁频带。对应的频域单边谱个数计算得到N1=8π(l-r)cosβ/Nλ,谱线间隔Δf=N·Fr。
在脉冲积累时间内,飞机目标的机身不出现偏航、俯仰、翻滚等运动。机身作匀加速运动时,机身回波近似可以表示为
(7)
式中,k为机身相对于旋转部件的RCS比例,根据文献[7]直升机型号Ⅱ估计值为100。那么空中目标回波信号可以表示为
SR(t)=si(t)+sb(t)+n(t)
(8)
式中,n(t)表示回波中的高斯白噪声。
短时傅里叶变换(Short-Time Fourier Transform, STFT)作为微多普勒分析中常用的方法之一,其主要思想是选择一个时频局部化的窗函数使加窗截断信号在短时间内平稳,进而可用傅里叶变换进行分析。假定s(t)为被分析信号,其STFT定义为

〈s(τ),h(τ-t)e-j2πfτ〉
(9)
式中,h(t)为窗函数。短时傅里叶变换实质上是一类加窗函数的傅里叶变换的集合,研究了局部时间范围内的频域特征。
2 飞机回波信号分离算法模型
2.1 多分量飞机目标回波信号分离框架
针对空中目标多分量回波信号,根据式(8)和式(9)可得时频信号表示:

(10)
从式(10)中可以得到,飞机目标的多分量信号的时频特征由各分量的时频特征线性叠加,为了分离多分量信号,可以先分别求各分量的时频特征,然后由时频逆变换得到各分量信号。本文提出一种基于深度学习网络自动提取时频掩膜值完成信号分离的模型,如图2所示。

图2 多分量飞机目标回波信号分离框架
图2算法具体实现步骤如下:
1) 将得到的飞机目标多分量回波信号SR(t)进行STFT得到时频矩阵H(t,f),对生成的时频图进行灰度化处理得到时频图灰度矩阵G(t,f),输入到Deeplabv3网络中。
2) 通过训练好的Deeplabv3网络模型自动提取输入的时频图的掩膜图为lx(t,f),其中背景label=0,时频掩膜部分为l0(t,f)。飞机旋转部件回波label=1,时频掩膜部分为l1(t,f)。机身回波label=2,时频掩膜部分为l2(t,f)。
3) 选定飞机目标回波中要提取的目标像素区域,使label=1,其他位置label=0,得到新的掩膜图Lx(t,f)。例如:提取飞机目标回波中旋转部件信号,使旋转部件对应的时频区域像素值label=1,机身和背景噪声像素值label=0,得到旋转部件时频掩膜值L1=label1×l1(t,f),同理可得到机身部分时频掩膜值L2=0.5×label2×l1(t,f)。
4) 将Lx(t,f)与原信号时频矩阵H(t,f)相乘,得到各分量的时频矩阵Hx(t,f)。
5) 对Hx(t,f)进行ISTFT,得到旋转部件信号x1(t),机身信号x2(t)。
2.2 Deeplabv3深度神经网络获取时频掩膜图
语义分割作为深度学习一种应用,是对图像中的每一个像素作出分类。深度神经网络对图像进行分割,克服传统图像分割方法中人工操作的误差大、出现过度分割以及不方便实时处理图像的一系列缺点。大多数语义分割网络设计采用编码器—解码器的设计架构,Deeplabv3网络提供一种与众不同的语义分割方法,如图3所示。

图3 Deeplabv3网络结构参数
针对空中飞机目标时频图特征,对图像二值化处理后,输入到图3所示Deeplabv3深度学习网络进行训练。采用513×513的飞机目标二值化时频图库作为输入进行训练,采用ResNet-50作为特征提取器,ResNet-50前面3个模块采用原始的残差单元,第4个模块采用新的空洞残差块,空洞残差块的多重网络空洞卷积扩张率为(2,4,8),输出步长为16,特征图尺寸为32×32。模块4得到的特征向量输入到带有空洞卷积的空间金字塔结构(Atrous Spatial Pyramid Pooling,ASPP)网络中,ASPP网络分别包括一个1×1的卷积以及3个 3×3的卷积(扩张率为(6,12,18)),实现大方位语境信息。
此外ASPP网络为了增加全局的语境信息的获取,还增加了全局平均池化(Global Average Pooling,GAP)去结合图像级别的特征。将ASPP各个分支的特征结合成一个单独的向量,再使用一个1×1的卷积对输出进行卷积,形成最终的分割逻辑。最后,通过一定的上采样操作得到正确的时频掩膜图。
Deeplabv3网络提倡在多范围语境中使用空洞卷积学习语义特征,其核心是采用ASPP网络。空洞卷积作为ASPP核心算法,其算法示意图如图4所示:空洞卷积是具有扩张因子的常规卷积,这个扩张因子能够扩展滤波器的视野。

(a) rate=1
图4中,当扩张率rate=1时,卷积操作等同于标准卷积,覆盖区域为3×3。同理当扩张率rate=2时,卷积操作的覆盖区域变为5×5,此时的卷积相当于一个稀疏过滤器,执行计算的单元为原始的3×3单元。空洞卷积算法实现在不增加计算量的情况下获得更大范围的语义信息。
3 仿真实验结果与分析
3.1 悬停状态
根据表1中飞机目标参数信息,考虑在远处时,飞机A、B、C的旋转平面与雷达波束方向近似平行,目标靠近的过程中雷达俯仰角β不断增大,设β的初始值为π/3。结果如图5所示。

表1 飞机仿真参数



图5 悬停状态下三类飞机旋转部件特征图
根据实际情况设直升机。雷达工作载频f0=5 GHz,波束驻留时间为300 ms。图5(a)、(b)、(c)为直升机的时频图,其中频闪时间间隔Δt=38.5 ms,最大多普勒频率fdmax=3 679 Hz,多普勒域单边谱个数N1=279,谱线间隔Δf=30 Hz。图5(d)、(e)、(f)为螺旋桨飞机的时频图,其中频闪时间间隔Δt=3 ms,最大多普勒频率fdmax= 4 509.9 Hz,最小多普勒频率fdmin=1 602.2 Hz,多普勒域单边谱个数N1=34,谱线间隔Δf=170 Hz。图5(g)、(h)、(i)为喷气式飞机的时频图,其中频闪时间间隔Δt=0.67 ms,多普勒域单边谱个数N1=4,谱线间隔Δf=1 500 Hz。以上理论计算结果同图中仿真结果基本一致。
3.2 直线运动
设直升机旋转部件和机身在雷达波束方向作匀速直线运动时,速度为80 m/s。在作匀变速直线运动时,初速度为80 m/s,加速度为60 m/s2。同表1中的直升机仿真参数,波束驻留时间为300 ms。
图6(a)为直升机匀速运动时旋翼产生的微多普勒信号的时频图,可以通过计算微多普勒频率的中值相对于0 Hz处的偏移来估计,估计的速度v=78.52 m/s,与所设参数误差为1.48 m/s。

(a) 匀速直线运动
图6(b)为直升机匀加速运动时旋翼产生的微多普勒信号的时频图,由时频图中峰值计算最小二乘法拟合直线为图6(c)所示,直线斜率k=3 926.7,估计a=58.9 m/s2,与所设参数绝对误差为1.1 m/s2。
3.3 多分量飞机回波信号分离
考虑到实际情况中,飞机目标回波信号包括机身、旋转部件以及杂波的影响。三类飞机目标时频图属于并不复杂的图像类型,以及标注数据的工作量。
采用表2、表3、表4中的18类飞机,通过改变飞机目标俯仰角β,得到每个编号飞机的5个时频图样本,共90个图像数据,将生成数据采用Labelme标注工具进行训练样本制作,用Deeplabv3网络对训练样本数据集进行训练。

表2 直升机仿真参数

表3 螺旋桨飞机仿真参数

表4 喷气式飞机仿真参数
图7为输出带标签的时频掩膜图。图7(a)、(b)、(c)分别为匀速直线运动状态下三类飞机目标旋转部件和机身回波的时频掩膜图,图7(d)、(e)、(f)分别为匀加速直线运动状态下三类飞机目标旋转部件和机身回波的时频掩膜图。



图7 匀速直线运动和匀加速直线运动时频掩膜图
根据得到的时频掩膜图,对加入5 dB的噪声的飞机目标时频图如图8(a)、(b)、(c)、(d)、(e)、(f)所示,采用上文提出的飞机目标时频图分离算法,可得到如下分离结果:三类飞机匀速直线运动状态下,分离得到旋转部件信号的时频图如图9(a)、(b)、(c)所示, 三类飞机匀加速直线运动状态下,分离得到旋转部件信号的时频图如图9(d)、(e)、(f)所示。可以看出,通过本文提出的算法恢复的信号同旋转部件回波信号形式基本相同,周期估计一致。

图8 匀速直线运动和匀加速直线运动时频图

图9 三类飞机匀速直线运动和匀加速直线运动的时频分离图
3.4 分离性能评价

(11)
为了验证本文方法的性能,由式(11)设定的相似度Cn,定量分析分离效果。Cn越大,说明还原后的信号分量与初始信号越相似,分离效果越好。信噪比为-9~11 dB的范围内,每隔2 dB记录信号相似度Cn,并绘制曲线如图10所示。
图10(a)、(b)分别表示匀速直线运动和匀加速直线运动状态下三类飞机的相似度,其中C1表示三类飞机带有杂波的原信号与无杂波原信号的相似度,C2表示三类飞机回波信号用本文提出的算法分离后带有杂波的信号与无杂波原信号的相似度。C3表示三类飞机回波信号用EMD方法分离后带有杂波的信号与无杂波原信号的相似度。

图10 三类飞机相似度曲线
分离后提取的旋转部件信号分量与原始旋转部件信号的相似度越来越高,说明分离效果越来越好。信噪比在11 dB时,匀速直线运动的情况下,三类飞机C2平均值为0.966 6,匀加速直线运动时,C2的平均值为0.961 2,说明此方法对信号的还原度较高,分离效果较好。从图10(a)、(b)可以看到,信噪比较低的情况下,由C1 本文对空中目标旋转部件的平动进行了回波建模,并分别对飞机的匀速直线运动和匀加速直线运动两种情况的飞机回波进行分析。采用Deeplabv3网络对机身、旋转部件在内的飞机目标回波信号时频图进行训练,成功得到时频掩膜图。采用时频掩膜图对带有杂波的多分量飞机目标回波信号实现分离,分离后的信号同原信号比较,还原度较高,并能起到杂波抑制的作用。4 结束语
