基于GM-PHD的目标空间分布感知算法
2020-07-22张淑芳索继东
柳 毅, 张淑芳, 索继东
(大连海事大学, 辽宁大连 116026)
0 引言
对边扫描边跟踪的认知雷达,目标的空间分布特性是实现对雷达信号控制的重要依据。仅是通过感知探测阶段的目标检测与跟踪实现对目标的数量、位置和运动状态等空间分布特性进行感知[1],由于受到目标检测性能和目标跟踪性能的影响,特别是在高虚警和密集目标环境下,会导致目标空间分布感知结果不可靠且时间过长。
近年来,高斯混合概率假设密度(GM-PHD)滤波算法成为多目标跟踪(MTT)研究的研究热点之一,该算法是线性高斯条件下的PHD滤波器解决方案,不仅避免了数据关联,并可同时完成对目标的状态和数目的估计[2-6]。但标准GM-PHD滤波器并不直接递推航迹,而是递推高斯项,由于无法确定目标的航迹所属,而无法形成航迹。为此,文献[7]提出为高斯项分配标签的方法,解决了航迹形成的问题。文献[8]提出的树形结构高斯项管理方法,实现了航迹管理,同时采用简单有效的计分规则抑制了虚假航迹的产生。然而该滤波器在没有新生目标强度信息输入的情况下,其没有检测新生目标的能力。实际上新生目标强度是未知的,如何从一系列包含杂波的量测中获取新生目标强度是GM-PHD滤波器需解决的问题。同时新生航迹初始状态是远离稳定状态的,如何保证新生航迹在过渡到稳定状态之前不被过滤掉,是另一个需要考虑的问题。文献[9]提出,为使新生目标不被修剪过程过滤掉,采用的方法是在剪裁高斯分量是,保留至少一个对应于每个测量值的高斯分量。但这种方法并不保证目标的正确关联,错误的关联会削弱目标强度,容易漏检新生目标。并且保留过多的高斯项会导致计算量增加。文献[10]提出了一种改进的ET-GM-PHD算法,通过引入一种新的估计测量似然值的策略来解决漏检这一缺陷并采用高斯分量标记技术获取目标轨迹。文献[11]的方法是将测量分为三类,分别对应虚警、新生目标和存活目标。利用位置相关性区分这三类测量,获取新生目标强度。这种方案减少了杂波的干扰,计算效率较高,但是仅适用于跟踪低速目标。对于新生目标由初始状态过渡到稳定状态的周期长,在这期间新生目标强度低,易漏检。针对新生目标强度未知的情况,本文在上述方法的基础上,提出一种改进的分段航迹管理GM-PHD多目标跟踪算法(简写为IGM-PHD-MTT),实现新生目标的检测,和有效的保护新生航迹,并通过改进修剪合并算法,在不损失新生目标的前提下,有效减少运算量。实现包括新生目标在内的雷达检测水域的目标数量、目标位置和运动参数的可靠估计。仿真实验表明,本文算法在未知新生目标强度的多目标环境下有很好的跟踪效果。分段航迹管理和改进的修剪合并算法的应用使滤波器能够适应速度较快的多目标场景,对虚假航迹也有很好的抑制作用。
1 GM-PHD多目标跟踪算法
1.1 随机集模型
设多目标状态和传感器量测分别被建模为随机有限集Xk和Zk。
(1)
(2)

xk,j=Fk-1xk-1,j+Bk-1ωk-1,j,j=1,…,Nk
(3)
zk,j=Hk-1xk+vk,j=1,…,Mk
(4)
式中,xk,j表示第j个目标在k时刻的状态,Fk-1,Bk-1和Hk-1分别表示状态转移矩阵、过程噪声转移矩阵和观测矩阵,ωk-1和vk分别是状态噪声和量测噪声,它们是均值为0,协方差矩阵分别为Qk-1和Rk-1的高斯白噪声。
1.2 GM-PHD滤波算法
文献[12]指出若满足下面的假设条件:
1) 目标的状态转移模型和观测模型都是线性的,即
fk|k-1(x|ζ)=N(x;Fk-1ζ,Qk-1)
(5)
g(z|x)=N(z;Hkx,Rk)
(6)
式中,N(·;m,P)表示均值向量为m、协方差矩阵为P的高斯密度函数,Fk-1,Qk-1分别为状态转移矩阵和状态噪声的协方差矩阵,Hk,Rk分别为观测矩阵和观测噪声的协方差矩阵。
2) 目标的存活概率PS,k(x)和传感器的检测概率PD,k(x)都独立于目标的状态,即PS,k(x)=PS,k,PD,k(x)=PD,k。
3)k-1时刻存活目标和k时刻新生目标RFS的强度函数为高斯混合函数,形式为
(7)
(8)

在以上假设条件下,即将PHD滤波算法简化为GM-PHD算法:
1) 预测方程
k时刻目标的预测强度,即预测PHD强度也是高斯混合形式:
vk|k-1(x)=vS,k|k-1(x)+γk(x)
(9)
式中,γk(x)为由式(8)表示的新生目标强度;vS,k|k-1(x)为存活目标预测强度,可表示为
(10)
(11)
(12)
2) 更新方程
在预测强度函数vk|k-1(x)为高斯混合函数的前提下,k时刻的后验强度vk(x|Zk-1)表示为
vk(x|Zk)=(1-PD,k)vk|k-1(x)+
(13)
式中,
(14)
(15)
(16)
mk(z)=mk|k-1+Kk(z-Hkmk|k-1)
(17)
Pk=[I-KkHk]Pk|k-1
(18)
(19)
其中,λc和c(z)分别表示虚警的期望数和单个虚警点的概率分布,Kk和I分别为量测的新息增益矩阵和单位矩阵。
2 改进的GM-PHD滤波算法
在GM-PHD滤波的处理过程中,后验PHD的高斯分量的数目是呈指数递增的,递增过程中会包含大量无效高斯项,为消除这些无效项,GM-PHD处理过程中引入了修剪和融合处理过程。标准GM-PHD滤波算法包括预测、更新、修剪、融合四个步骤[13],其中修剪、融合能去除大量无效高斯项,避免航迹交换,可极大地减少计算量。然而,在原始的GM-PHD滤波器需要新生目标强度和传感器的量测作为输入。
2.1 新生目标检测
按照量测的来源,可以将k时刻量测分为三类,即Zk=Zc,k∪Zs,k∪Zb,k,其中,Zc,k,Zs,k和Zb,k分别为k时刻的虚警、存活和新生目标量测集,且相互排斥,即某个时刻量测集合仅为三种量测的其中之一,不可能同时为其中的两种或两种以上。本文中不考虑衍生目标情况。

可利用量测值和预测值的位置相关性,确定Zc,k,Zs,k和Zb,k。
存活目标量测集:
(20)
新生目标量测集:
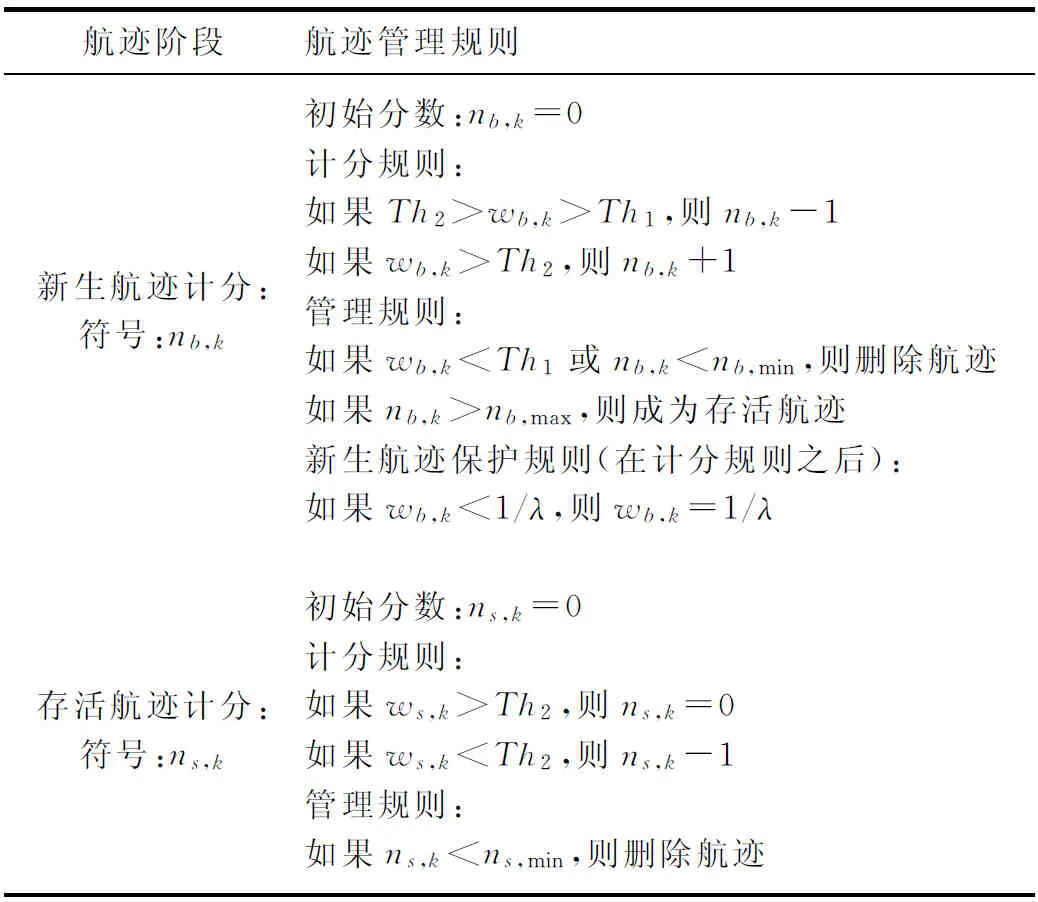
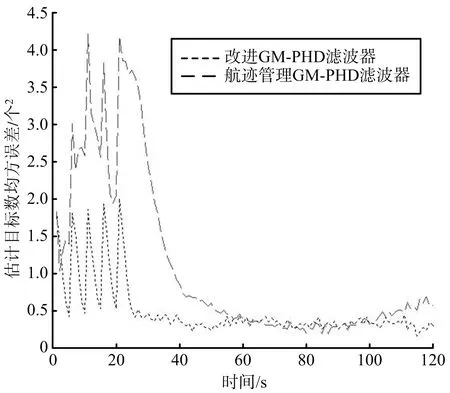
Zb,k={z|‖z-z(c,b),k+1‖ z∈Z(c,b),k,z(c,b),k+1∈Z(c,b),k+1} (21) 式中,Z(c,b),k=Zc,k∪Zb,k,d1和d2分别为生存目标和新生目标的距离门限。 利用式(20)能够分离量测集Zk中由存活目标产生的量测Zs,k和由虚警及新生目标产生的量测Z(c,b),k。根据式(21),将新生目标延迟一个量测周期,利用虚警的不相关性,利用k-1时刻的量测,可将虚警量测从Z(c,b),k中去除,剩余量测Zb,k即为新生目标的量测。 基于式(20)和式(21)的定义,本文提出的改进GM-PHD滤波器计算过程如图1所示。图中,νb,k-1,νs,k-1分别代表k-1时刻新生和存活目标的高斯项,Jb,k-1和Js,k-1分别对应新生航迹和存活目标的高斯项的数目,其余符号以此类推。 图1 改进GM-PHD滤波器递推流程 (22) 本节讨论式(20)和式(21)中的距离门限d1和d2转换成高斯项权重修剪门限Th1和Th2间的关系。同时将文献[12]中的航迹管理规则进行扩展使其适用于本文的分段航迹管理。 1) 分段修剪门限 (23) 在复杂场景下,新生目标强度修剪门限应该修正为 (24) 其中,ζ≥1与场景复杂度(目标密集程度)有关。考虑逐渐增加的目标数目,即在k-1时刻加入存活目标,增加新生目标,在k时刻量测中增加虚警、存活目标、新生目标量测,式(23)中,分子部分不变,分母部分求和项的项数随目标和量测个数的增加而增大,同时目标与虚警间偶尔出现的分离度小等情况都会导致分母求和项的增大,增大的程度即场景复杂度,用ζ≥1表示。 建立相似的场景,可以得到存活目标修剪门限为 (25) 具有针对性的修剪门限的加入,在一定程度上解决了标准GM-PHD滤波器中为了顾及新生目标使门限设置过低,而带来大量无效高斯项的问题,这也就是前面所提到的,合理的门限设置能减少高斯项数目的原因。 2) 分段航迹管理规则 文献[8]的研究表明,计分航迹管理规则能够简单有效地抑制虚假航迹,保持航迹的连续性。本小节把这种航迹管理规则扩展到分阶段航迹管理中。管理规则如表1所示。 表1 分段航迹计分管理规则 表中新生航迹保护规则的提出是为了解决2.3节的1)中最后提出的高斯项权重修正要求,事实证明这种修正极大地保护了新生航迹。nb,min决定新生航迹状态调整时间,目标速度越大,状态调整越缓慢,该值应当越小。nb,max决定新生航迹成为存活航迹需要的确认时间,该值越大,虚假航迹产生几率越小,新生航迹成为存活航迹所需时间越长。nb,min决定存活航迹在目标丢失时的信息保留时间,该值越大,航迹保持连续的能力越强。 文献[7-8]中的标签法和树形结构航迹管理方法是本文航迹形成的基础。由于标签法描述复杂,本小节着重改进部分的描述,并用高斯项加以说明。由伪代码表示的GM-PHD滤波器算法流程可参考文献[12-15]。 1) 现给定k-1时刻 2) 预测:根据式(9)和式(10),预测后验预测强度 νk|k-1=νb,k|k-1+νs,k|k-1 (26) 式中, (27) (28) 这里,Jb,k|k-1=Jb,k-1,Js,k|k-1=Js,k-1。 3) 更新:根据式(13)和式(15),更新后验强度 (29) 式中, (30) (31) (32) (33) 高斯项权重的修正可参照文献[13]、文献[15]。 (34) (35) (36) (37) 单目标的状态转移方程为 单目标的量测方程为 状态噪声的协方差矩阵为 m1=[-900,16,560,-10]T m2=[-900,16,520,-10]T m3=[520,-10,900,-16]T m4=[-540,10,-900,-16]T m5=[-620,-2,900,-14]T m6=[-620,6,900,-16]T m7=[-620,14,900,-10]T m8=[620,2,-900,14]T m9=[620,-6,-900,16]T m10=[620,-14,-900,10]T。 目标出现时间为[0,0,5,5,10,15,20,10,15,20]; 目标消失时间为[102,102,107,107,80,95,110,80,95,110]。 真实航迹如图2所示。航迹5、6、7以及航迹8、9、10起点相同,但出现时间不同,事实上由于没有考虑分裂目标,本文算法(图中称为“改进GM-PHD滤波算法”)无法处理衍生目标。航迹1、2同向且相互靠近,航迹3、4反向。 图2 目标状态航迹 改进GM-PHD滤波器航迹输出航迹如图3所示,输出航迹很干净,没有虚假航迹。在新生目标强度未知并且目标速度较大的条件下,完成了新生航迹的检测和延续。新生航迹检测成功率极高,在很少测量周期内转换成为存活航迹。存活航迹在目标消失的几个测量周期中持续外推,说明目标漏警时成功保留了航迹信息。 图3 改进GM-PHD滤波器生成的航迹 航迹管理GM-PHD滤波器输出航迹如图4所示,由于航迹管理规则的应用,同样没有虚假航迹,但是在目标速度较大的条件下,使用10-5大小的修剪门限无法保留新生目标信息,导致大量的新生航迹漏检,即使是使用更小的修剪门限,由于缺少新生目标强度修正规则的保护,仍然不能够达到很高的新生航迹检测率。事实上,如果目标速度较小,航迹管理GM-PHD滤波器能很好地保留新生目标,形成完整航迹,这是因为速度较小时,新生目标强度大于修剪门限,并且随着目标状态的调整,强度逐渐增大。 图5和图6分别是100次蒙特卡罗实验下目标个数后验期望的均值和均方差,改进的GM-PHD滤波器在目标出现的少数几个测量周期内就能得到较准确的目标个数估计。这是由于新生目标在航迹起始阶段得到保护,使其有足够的时间过渡到稳定状态。根据PHD的近似“损失最小”条件,当测量与预测误差较小,也就是航迹状态稳定时,能得到较准确的目标数目估计。而航迹管理GM-PHD滤波器在速度较大的条件下,缺少保护规则,不能保留新生目标信息,目标数目估计误差大。改进GM-PHD滤波器所有航迹在第25个测量周期后达到稳定,但是存在0.5的均方误差,这是虚警测量引起的,当虚警测量与存活目标没有很好分离时,会带来误差,同样是不满足近似“损失最小”条件带来的误差。 图5 两种GM-PHD滤波器平均目标个数估计 图6 两种GM-PHD目标个数估计均方误差 航迹管理无论是在传统的测量-关联多目标跟踪中还是在PHD多目标跟踪中都有十分重要的作用,直接关系到跟踪的效果。将航迹管理策略应用于GM-PHD滤波器能够提高GM-PHD滤波器的性能,本文提出的未知新生目标强度下分阶段航迹管理GM-PHD滤波器依靠简单的航迹管理策略有效地解决了新生目标估计的问题。为雷达目标空间分布的感知提供了一种有效的方法。但该方法是建立在点目标的假设条件下的,由于雷达分辨精度的提高,目标会占据传感器的多个分辨单元,这种情况下的多目标跟踪问题就拓展为多扩展目标的跟踪问题。利用目标录取技术中的重心录取方法,录取目标的中心位置作为目标的量测值,可将扩展目标的跟踪问题转化为点目标的跟踪问题。本文所提出的方法,将为进一步研究有效提高未知新生目标强度情况下的扩展目标的GM-PHD滤波算法的新生目标的跟踪质量提供参考。2.2 改进GM-PHD滤波器递推过程



2.3 分段航迹管理




2.4 改进GM-PHD滤波器计算过程










3 仿真实验分析







4 结束语
