基于物联网的危化品运输监控预警系统研究
2020-07-21杨嘉乐雷起谷董智桥陈先锋
杨嘉乐,刘 洋,闫 聪,雷起谷,董智桥,刘 博,陈先锋
(1.武汉理工大学 安全科学与应急管理学院,湖北 武汉 430070;2.武汉电力职业技术学院 电力工程系,湖北 武汉 430079)
危化品在运输过程中存在大量的不安全因素。一方面,危化品具有易燃、易爆、有毒等特性,在运输过程中由于设备缺陷、撞击、挤压等原因,盛装易燃、易爆、有毒危险品的容器及相关辅助设施易发生破裂、损坏,引发危化品泄漏,进而导致火灾、爆炸、中毒等重大事故发生;另一方面,危化品道路运输车辆有时必须通过人口聚集区域,对沿途的居民、行人、其他车辆及设施等构成巨大的潜在威胁,一旦发生事故将会造成较大范围的人员伤亡和财产损失[1]。此外,近年来危化品货运量不断增大,易燃易爆危险品运输事故屡见不鲜且有日渐高发的趋势,采用先进的物联网(internet of things,IoT)技术[2]对危化品运输进行实时监控和及时预警,对完善危化品运输管理,提高危化品运输过程的安全管理水平具有重要意义。
危化品具有极高的危险性,危化品事故本身就具有发生突然、形式多样、后果严重和处置艰巨等特点[3],且在运输过程中易受复杂多变的环境影响,在长期脱离管理者视线的远距离运输过程中,可获取信息严重缺乏,可控制难度大。因此,危化品运输过程的监控和预警应借助车载传感器的数据采集,实现危化品运输过程的信息获取,并对危化品罐车的多重信息参数进行风险评估与及时控制。
目前,国内外关于物联网思维的监控与预警系统研究尚处于起步阶段,如刘强等[4]提出了危化品运输安全统一监控框架与监控平台,并给出了平台的总体框架和配置。惠萌等[5]利用物联网技术开发了一套监控系统以实时监测危险品运输车辆相关参数的变化,主要采集了位置信息、速度和温度等数据进行联网上传,并实现了车辆轨迹显示。沃尔沃等牵引车上搭载了基于控制器局域网络(controller area network,CAN)总线的监控设备,能够采集车辆相关数据并上报远端服务器。陶氏化学利用无线射频识别(radio frequency identification,RFID)技术,通过上传危险化学品位置等相关数据对危险化学品运输进行实时监测[6]。上述研究在一定程度上促进了危化品运输过程的安全管理,但关于危化品运输的复杂特性和多重信息参数方面的研究仍存在不足。如大部分安全监控系统仅限于传统的单传感器报警或同类传感器报警,而对基于数据分析与融合的异类传感器数据触发报警的物联网监控系统的研究较少,预警体系不健全,监测要素不全面,功能使用不高效,不能支持运行过程中的全面信息化[7]。此外,由于危化品种类众多、性质差异大,传统监测手段的抗干扰能力较差、装备专用化程度低、传感器参数集成难度大等各种问题,尤其是事故发生临界状态下的风险预警与应急处置联动技术仍有待开发。
因此,综合考虑不安全因素的种类及其管控要求,结合IoT理论、传感检测技术、辅助全球卫星定位系统(assisted global positioning system,AGPS)、通用无线分组业务(general packet radio service,GPRS),采用Modbus通信协议[8]及远程测控单元(remote terminal unit,RTU),通过采集海量多维度车载传感器监测信息进行在线运算、分析与预警反馈,构建基于IoT的危化品运输过程实时监控和预警系统,并综合利用该系统对危化品运输过程进行全方位监控,最大程度地进行危化品运输过程的风险控制与隐患排查,保障社会公共安全和人民的生命财产安全。
1 危化品运输过程风险分析
1.1 危化品运输特征分析
公路运输凭借我国完善且覆盖范围广泛的路网,加之其可灵活衔接不同运输方式、运输成本低等优势,成为了危化品运输的主要途径[9]。危化品罐车因其运输能力高效和运输成本较低成为长距离公路运输的主要载体,罐车结构主要分为驾驶室、加装车身底盘、储运罐体3部分。运行方式为:罐体与固定底座相联接,固定于车身底盘上方,再与驾驶室联接进行危化品运输。危化品运输特征如图1所示。
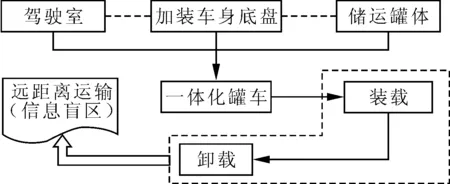
图1 危化品运输特征
1.2 安全风险分析
通过对多起危化品运输安全事故案例的总结分析和对危化品承运企业的专项调研,危化品运输过程中的安全风险主要来源于驾驶员的不安全行为和承运罐车的不安全状态,可归纳为突发交通事故、驾驶员信息盲区和应急处置作业3类。
(1)突发交通事故。根据国内罐车运输行业统计[10],我国80%的危化品是通过公路进行运输的,每年利用公路承运的危险化学品达3亿t,占公路年运输总量的30%以上。长途运输时,由于承运罐车的重量较大,车身较长,在高速行驶的过程中由于巨大的惯性和较低的灵活性,遭遇复杂路况和恶劣天气时很难保持稳定行驶,极易发生交通事故。沈小燕等[11]通过对国内886起危化品罐车道路运输事故进行调查发现,82.8%的危化品罐车运输事故是由交通事故引发的,对于典型的危险品如天然气、汽油、乙醇、硝铵类化学物质等,因其具有易燃易爆特性,遇突发交通事故则更易引发危险源[12]能量释放,造成极大的安全风险。
(2)驾驶员信息盲区。对危化品运输罐车驾驶员而言,信息盲区主要是指驾驶员对罐车情况观察的死角和信息难以辨识的地方。根据罐车的实际构造,信息盲区主要是指视线盲区,由于罐车两边的后视镜无法完全收集到车身周围的全部信息[13],以及驾驶室和装载罐体之间完全隔离形成的视线阻隔,特别是在驾驶员正常驾驶途中,会由于无法得知后方罐体的实际状态而造成安全隐患。
(3)应急处置作业。一方面,驾驶员的受教育程度相对较低,缺乏对危险源信息的具体认知,安全专业水平较低,不重视甚至忽视安全风险。另一方面,危化品承运罐车上缺乏快速有效的应急处理设施,事故现场的应急处理效率较低。因此,现场人员无法做到危险源的及时辨识和突发事故的正确应急处置,对危险源能量无法及时管控,预警延迟性较大,容易造成极大的安全隐患。
综上所述,在危化品运输过程中,由于客观条件下的路况天气和主观上的安全管理缺陷造成的“管理人员-驾驶员-危化品罐车”3方面信息的阻断,无法即时共享安全风险信息,使危化品运输过程中安全事故发生概率大幅度增加。因此,建立一套危化品运输过程实时监控与预警的系统,可以有效改善危化品运输的安全管理状况,确保危化品罐车信息多方共享,实现全面信息交互。
2 运输过程监控预警系统设计
2.1 系统框架构建
基于上述安全风险分析和IoT理论、传感检测技术、AGPS定位技术及GPRS通信技术,构建了危化品运输过程实时监控预警系统(real-time monitoring-warning system for transportation of hazardous chemicals,RMS-THC),实现对易燃易爆危化品运输过程的有效跟踪、监测监管、事故高效应急处置,提升物流运输、配送、调度的效率,确保运输的安全。RMS-THC系统框架如图2所示,主要分为信息感知层、层间管理层和远端控制层3层结构。其中,信息感知层是系统的基础,主要由传感器等监测仪器组成,负责对罐车信息进行多维度采集;层间管理层通过RTU通信模块与远程控制层建立双向联系,实现传感器监测数据集成化、数据预处理及数据的稳定传输,可响应控制层传呼,对工况现场实现简易控制;远端控制层是系统综合控制管理的核心,负责数据的存储、综合分析、数值模拟、预警信息发布及应急联动,促进现场信息透明化;监控中心负责数据可视化显示,并与司机和承运企业共享实时信息,提高管理效率,为应急方案部署提供可视化的全方位信息共享平台。
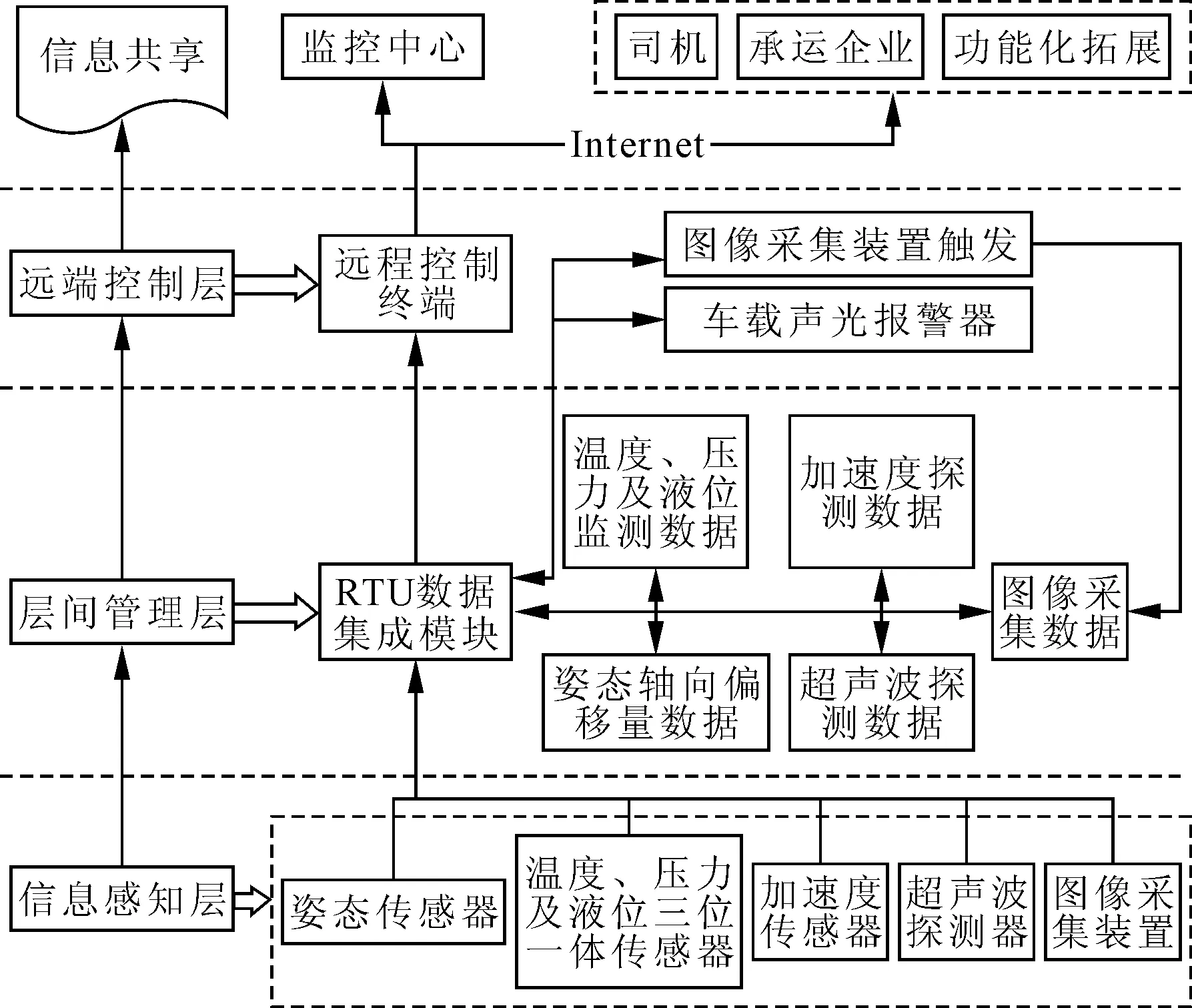
图2 RMS-THC系统框架
2.2 系统网络拓扑
在系统框架下进行危化品运输过程实际工况的设备布设,如图3所示。通过多组车载传感器,实时将数据通过有线连接汇聚至车载RTU数据集成模块并进行初步运算处理,再由其采用Modbus RTU通信协议,经GPRS远程通信网络传输数据至远端控制层,进行数据存储、分析、模拟,并将结果上传至监控中心和司机、承运企业等用户端;同时罐车驾驶员通过车载声光报警器或手机端平台,实时掌握运输过程中的罐车状态。突发安全事故时,图像采集装置受到RTU模块触发,进入工作状态将现场监控画面无线传输至监控中心,确保管理人员及时获知罐车安全状态,并根据现场情况进行精准化安全评估。
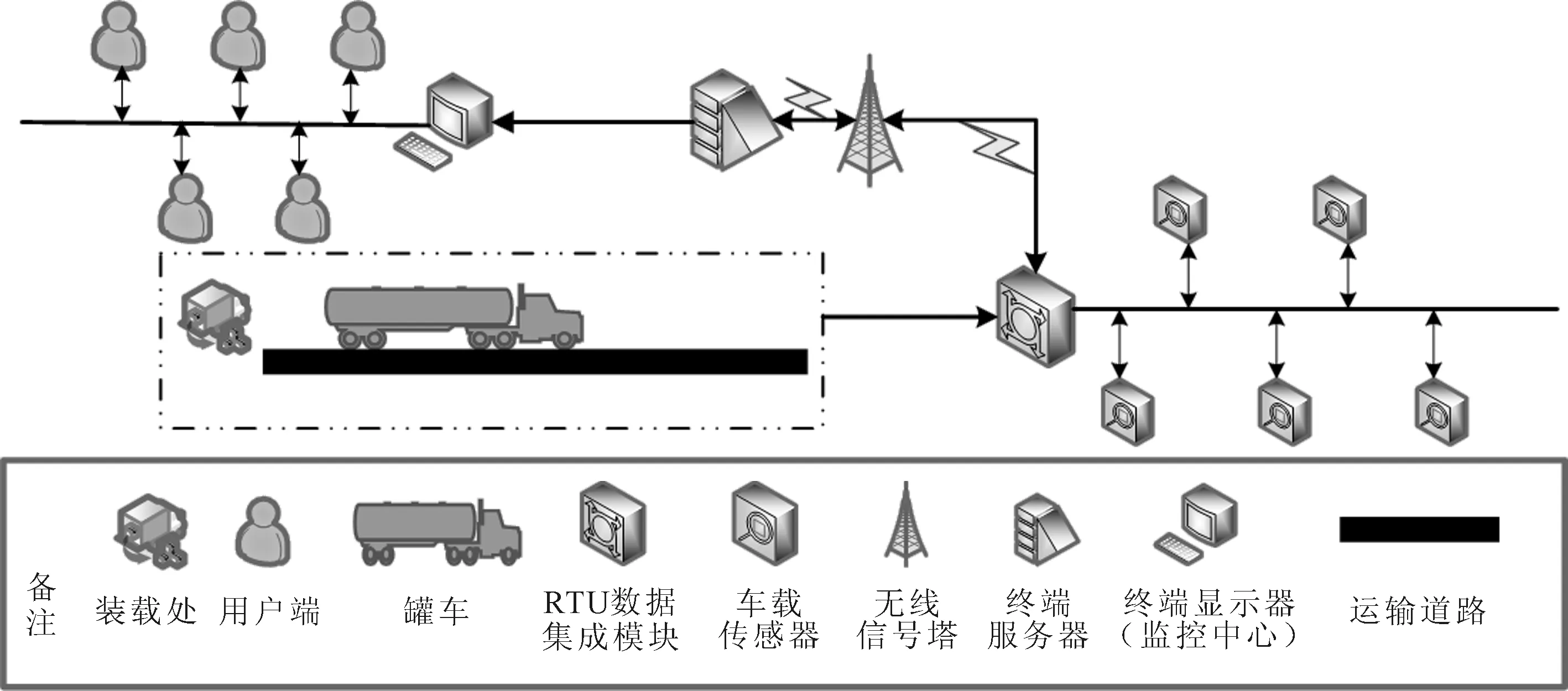
图3 RMS-THC信息网络拓扑
2.3 预警响应机制
为实现风险管控与应急处置高效化,提高危化品运输过程中信息的透明度,需针对系统框架建立详实的预警流程,如图4所示。根据不同事故模式的风险分级,优先考虑人员安全,选择最佳处理方式,最大程度地保障安全管理的全面性。
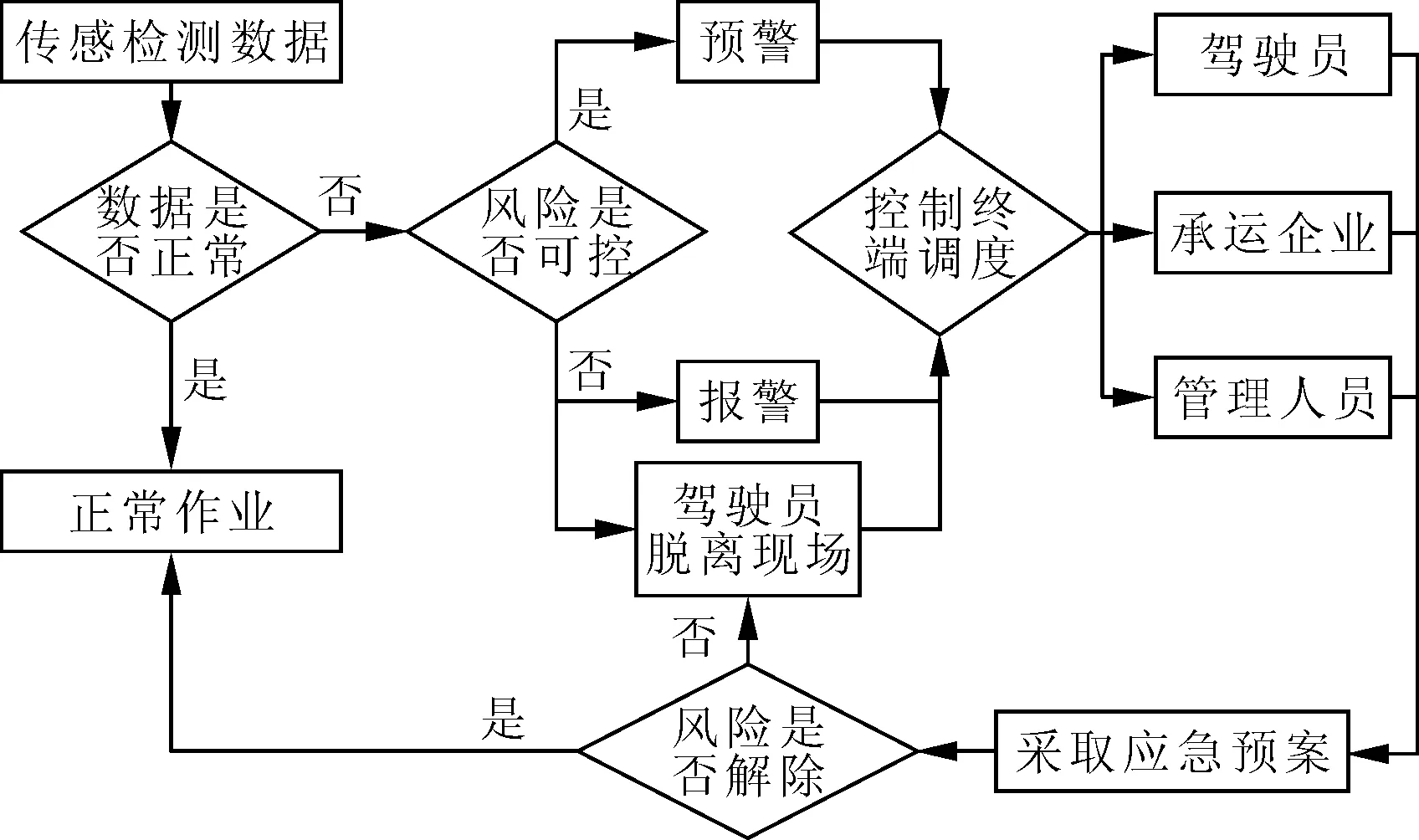
图4 RMS-THC预警流程
2.4 常态化交互管理体系
在RMS-THC工作过程中,突发事故的及时响应为运输安全提供了巨大保障,对于运输过程中的隐性事故,建立常态化的信息交互管理体系,实现车辆节点-车辆节点和车辆节点-总控平台辐射化的信息交互具有重大意义。
车辆驾驶员通过手机终端软件获知同一运输线路的危化品承运驾驶员信息,经过信息交互提前了解前方路况、天气等车辆运输条件,遭遇路段维修或拥堵时及时更改线路,提高运输效率。另外,远程监控平台获知的车辆风险评估信息,通过网络及时反馈到驾驶员的手机终端软件,驾驶员可以通过手机终端软件向远程监控平台汇报疑似的车辆危险信息,实现双向信息交互,可以有效改善危化品运输的常态化安全管理。
3 RMS-THC关键技术分析
3.1 多传感器信息融合的风险评估与预警
信息融合技术又称多传感器信息融合技术,是指利用信息技术对按时序获得的多源监测数据按照一定准则进行自动综合分析以完成所需的决策和估计任务的信息处理过程。通过对各类传感器及其监测数据的灵活处理,将多个传感器在时间或空间上的冗余或互补信息依据一定准则进行组合,以获得被测对象的一致性解释,综合实现信息系统全面化。利用该技术可以实现风险状态精准化评估,合理量化潜在风险影响程度,根据风险评估结果向远程监控平台发送不同等级的预警信号。
3.2 基于神经网络的运输危险状态监测识别
对运输危险状态进行正确识别是实现安全预警和车辆控制的基础,由于车辆运行过程中的状态参数具有时变性,因此在数据信息融合的基础上,需要通过多个传感器数据的分析处理,提取危化品运输正常状态和突发事故时的状态特征信息。对于复杂多样的特征信息,利用神经网络作为模式识别器,将传感器监测数据输入后,由网络输出预测值,融合反向传播(back propagation,BP)算法,针对预测值与实际值的差异性,将梯度由神经网络输出层反向传递至输入层,通过优化模型参数和降低网络误差,可以有效提高识别精度,减少误判率。
3.3 基于AGPS的卫星定位技术
AGPS技术是指GPRS与全球卫星定位系统(global positioning system,GPS)联合作用的卫星定位技术,通过GPRS通信基站收集卫星信息,设备收到定位请求后,基站将GPS参考时间、卫星标识符、星历和GPS小区帧定时测量值等GPS辅助数据下发给被定位设备。AGPS技术可以大幅度提高定位精度,缩短设备捕获卫星信号的延迟时间,对于卫星信号较差的区域,同样可以利用GPRS基站收集的卫星信息辅助捕捉卫星信号,提高设备捕捉卫星信号的灵敏度。危化品通常需要进行长途跨区域运输,途径山区、隧道等复杂的野外环境时,利用AGPS仍可准确迅速地实时定位车辆。
针对危化品运输过程的区域性和动态性特点,通过实时定位车辆地理位置,结合GIS技术,获取车辆周围地理环境和气候条件,为危化品运输远程监控提供信息支持与服务。当事故发生时,结合车辆周围特殊环境提出事故应急预案,及时通知事故点就近部门实施应急预案,为应急车辆提供最优抵达路线,并通过移动设备拨号远程指挥驾驶员实行现场隔离和人员避险等措施。
3.4 适用于复杂环境的远程数据传输技术
车载RTU模块具有完备的防掉线机制,针对野外运输过程可能出现的通信盲区,通过数据终端对通信传输信号进行检测,掉线前及时通知远端监控平台,并运用RTU模块的离线存储功能保留通信盲区内的监测数据,恢复通信连接后重新发送数据。由于通信盲区导致系统出现异常监测,数据的间隔传输引发时间序列特征异常,利用异常时间序列检测模型,识别时间序列断点,按照真实离线监测数据集,运用时间序列合成工具,通过指定异常区段、变化幅度、异常类型、异常值和趋势合成时间序列,进而结合间隔前后数据集,自动生成连续的可视化分析数据报表,最终实现车辆全周期的信息获取与交互。
4 监控预警系统实际工况
4.1 设备选择
在硬件方面,监控预警系统主要由车载声光报警器、图像采集装置、车载传感器网络、车载RTU集成通信模块、远端数据存储服务器、远端控制主机等组成。其中,车载传感器网络主要由姿态传感器、阀门处超声波探测装置、加速度传感器、罐外连通三位一体(温度、压力、液位)传感器构成。由于RTU数据采集终端具有通讯能力优良、存储容量较大、恶劣环境适应性强、计算功能较强[14]、模块结构化设计、支持多向拓展和实时动态通信效率高[15]等优势,能有效应对危化品长途运输过程中的复杂环境(如温湿度剧烈变化、信号干扰因素多、通讯距离较长),故选用以Modbus通信协议为基础的RTU通信模块实现车载多组传感器数据集成处理、远程数据传输和工况现场简易控制。
根据系统需要,选用RS485接口的RTU-S271数据采集终端,内嵌工业级GPRS通信模块,集成稳定可靠的32位高性能微控制单元(microcontroller unit,MCU),提供4路数字量和模拟量的输入、4路继电器输出和1路现场环境监控的温湿度输入。预先对RTU配置各种高低限参数,触发后即通过GPRS远程通信网络实时传输数据至远程控制终端。
另外,监控预警系统将传输控制协议(transport control protocol,TCP)作为层间信息传输协议,利用其可靠交付的、全双工的、面向字节流的点对点服务,构建Modbus RTU通信协议的底层基础。系统TCP链接采用RTU设备-服务器模式,由RTU设备发起链接建立,服务器等待链接建立。由于TCP具有可靠传输、滑动窗口、流量控制及延迟应答等机制,使通信双方实现最大报文段长度和最大窗口大小等参数的协调,能够对缓存大小等层间运输实体资源进行合理分配,可有效实现通信节点间的双向信息交互,网络通信流程如图5所示。
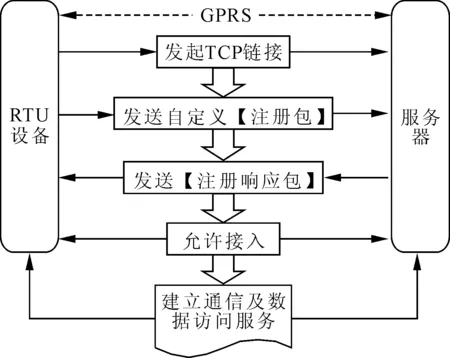
图5 网络通信流程
4.2 系统监控效果分析
RMS-THC系统主界面如图6所示,主界面的主菜单包括系统平台的4个功能模块,通过执行功能模块可以实现现场数据采集、数据导出、设备管理、定位监管、云组态管理等功能。主界面显示系统管理下的RTU数据采集终端联网情况和RTU设备接入的传感器信息。在菜单选项中对系统功能进行明确分类和细化管理,采用人性化设置,保证系统信息处理的高效性。如在设备功能选项中,详细显示了设备信息,实现了系统通信管理、协议选择及车载传感器的数据问询、指令更改等功能,保证了系统管理的安全性和灵活性,设备信息界面如图7所示。

图6 RMS-THC系统主界面
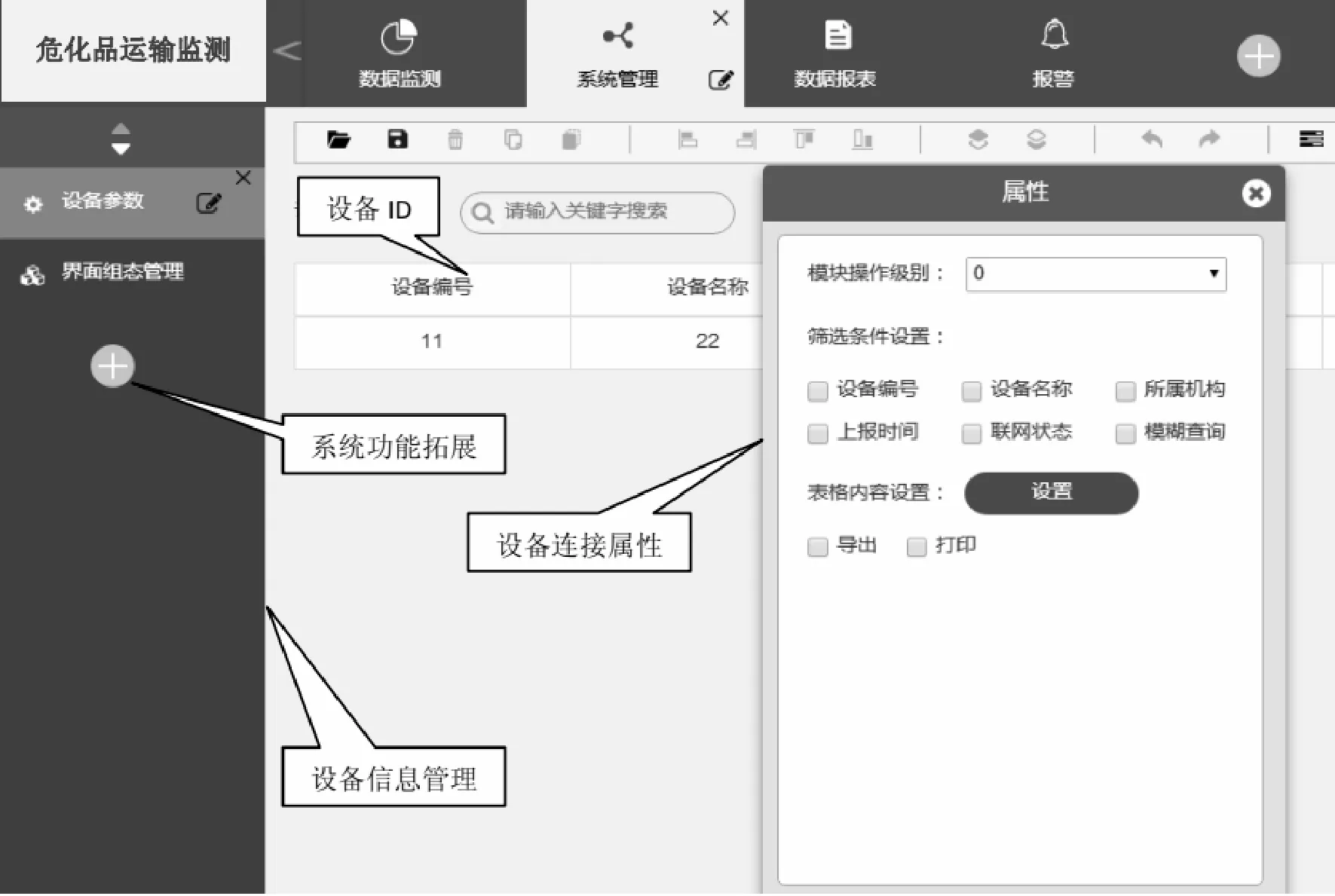
图7 设备信息界面
5 结论
危化品运输过程中的风险主要来源是在长距离运输与复杂环境的情况下,管理人员对现场信息不知情、隐患无法有效排查及突发事故处置不及时,为此笔者提出基于IoT理论,综合利用传感检测技术、卫星定位技术、GPRS通信技术对危化品运输过程风险进行管控,构建了实时监控预警系统并初步应用于实际罐车上,得到以下结论:
(1)通过综合分析危化品运输过程中的风险因素,利用传感检测技术对罐车多重参数进行检测,并将数据集成到RTU数据采集终端,实时传输至控制终端,实现及时预警与远程管控,在实际工况中可以有效减少人员伤亡和二次事故的发生。
(2)采用车载RTU数据集成终端,集成多组车载传感器数据进行无线传输,保障了危化品长距离运输过程中的稳定通信,可实现远程控制终端的数据问询、统一调度、触发控制等功能。
(3)通过构建危化品运输监控预警系统,为危化品罐车运输事故风险评估提供实时可靠的现场数据,并支持多方接口扩展与信息共享,实现安全监督管理、消防、道路运输管理等部门协同管理,为预防重大事故演化、指导应急部署提供了科学方法,保障了风险控制和应急救援的高效性,有较大的推广价值。