基于轴频电场线谱特征的目标检测及识别
2020-07-21赵文春姜润翔喻鹏张伽伟
赵文春,姜润翔, 喻鹏,张伽伟
(1.海军工程大学 电气工程学院,湖北 武汉 430033;2.海军工程大学 兵器工程学院,湖北 武汉 430033)
0 引言
舰船在海水中航行时,在螺旋桨的调制作用下会在其周围生成轴频电场信号[1-2]。时域上,轴频电场信号幅值通常可达微伏每米级别的量级;频域上,轴频电场信号为低频线谱,其能量主要集中在0.5~30 Hz(基频与螺旋桨转动频率一致)。鉴于以上特点,轴频电场信号广泛应用于水中目标的检测[3-5]。一方面,轴频电场的频谱特性与舰船的轴系结构密切相关,由于不同类型舰船的轴系结构差别较大,为利用轴频电场信号识别舰船提供了基础;另一方面,为了提高舰船的隐身性能,通常采用主动轴接地技术来降低轴频电场信号[6-7],轴频电场信号强度可降低90%以上,大大增大了利用轴频电场信号检测舰船的难度,因此需要研究低信噪比条件下舰船轴频电场信号的检测与识别技术。
目前,国内外学者的研究重点在于轴频电场信号的检测,而在利用轴频电场信号特征对目标识别方面的研究相对较少。现有检测方法主要采用匹配滤波、能量检测、小波分解等技术[8-12],匹配滤波需要目标信号的先验信息,在实际中往往难以确定信号的类型;能量检测存在检测效果受环境噪声、目标信号强度的影响较大,且门限值不易设定的问题;小波分解的方法计算量较大,不适用于水下低功耗检测设备。为了解决低信噪比条件下的轴频电场信号检测难的问题,本文在大量海上实测数据分析的基础上,提出基于轴频电场线谱特征的自适应门限检测和识别方法。
1 舰船轴频电场及其特性
当金属舰船在海水中时,电化学腐蚀电流和防腐电流都会经海水流向螺旋桨,通过尾轴、大轴及其他机械线路等返回到船壳,如图1所示,图中ICCP为外加电流阴极保护系统。此回路的电阻抗RB会随着螺旋桨轴承的旋转发生周期变化,使流经海水的电流受到调制。从而在舰船周围产生以螺旋桨转动频率为基频的时变电场信号,该电场称为轴频电场[1]。

图1 轴频电场产生原理Fig.1 Generating mechanism of shaft-rate electric field
一方面,轴频电场的强度与轴地电阻波动、流经螺旋桨的电流强度关系密切,不同舰船的轴频电场信号强度差别可达数十倍;另一方面,轴频电场信号强度近似与距离的3次方呈反比,同一艘舰船由远及近航行时,电场强度差别较大。一艘客轮通过时的轴频电场信号时频图如图2所示。图2中0 dB对应于1 μV/m,Ex、Ey和Ez分别为轴频电场的3个分量,可以看出轴频电场强度在150 s附近迅速增强。
除此之外,海流、潮汐、海浪运动产生的感应背景电场E是水下探测的主要干扰源[13-14],有
E=-v×B,
(1)
式中:B为测量点的地磁场强度(T);v为测量点水质点的速度(m/s)。由(1)式可知,B、v的随机性必然导致E的随机性。
2 自适应线谱能量检测
由第1节分析可知,水下电场探测系统接收到的轴频电场信号及海洋环境背景电场信号均具有随机性,因此在采用能量检测法对轴频电场信号检测时,难以确定信号的检测门限。
2.1 检测方法及步骤
为了解决上述问题,本节在借鉴雷达及声信号自适应检测方法[15]的基础上,提出基于自适应线谱能量的轴频电场信号检测方法,信号检测流程如图3所示。

图3 信号检测流程Fig.3 Flow chart of signal detection
检测步骤具体如下:
1)对固定时长(20 s左右)时间窗t0内采集到的低频电场信号x(t)进行快速傅里叶变换(FFT)计算,得到x(t)的频谱Xfft,去除Xfft中的直流分量,得到去直流FFT序列XFFT为
XFFT=[X0,X1,…,XN],
(2)
式中:N为频点数;Xi对应的频率为Fi,i=0,1,…,N.
2)对XFFT进行能量归一化,以提高动态观测范围(舰船由远及近航行通过探测节点时,其能量差别可达数十至上百倍,而在20 s左右的观测时间内其能量变化不大),得到归一化FFT序列为
(3)


(4)
式中:Median(·)为中值滤波运算符(主要根据海洋环境噪声频谱计算自适应浮动门限;Δ=[Δ0,Δ1,…,ΔN]为固定门限向量。相对于传统信号检测算法,由于检测过程中XFFT是实时变化的,从而Xt是变化的,即Xt为自适应门限。
(5)
式中:T为差值,T=[T0,T1,…,TN],TN表示第N个频点的检测量与门限的差值。若Ti≥0,则有检测标识量Yi=1,否则Yi=0.
5)对T=[T0,T1,…,TN]进行时间积分,以进一步提高检测的可靠性,积分特征P具有如下形式:
(6)
式中:[P0,P1,…,PN]分别为每个频点的积分特征;M为积分时长;YN,t为第N个频点在t时刻的疑似判别量。若在某时间窗M内疑似线谱频点出现的最大频次Q大于某一设定值R,则判断为疑似目标出现;若连续若干秒时间t1内均出现疑似目标,则判断目标信号出现。
6)在检测出目标后,采集目标检测时刻内的积分特征P并计算其均值,进而计算目标积分特征与数据库中目标积分特征S的欧氏距离D,以实现对目标信号的识别分类,其中:
(7)

(8)
式中:Fi、Fi-n为对应的频率点;n为频率点间隔。

2.2 固定门限设定方法
由2.1节分析可知,Δ=[Δ0,Δ1,…,ΔN]和Q的大小对检测算法影响较大,Δ=[Δ0,Δ1,…,ΔN]可通过仿真计算得到。由于在短时间(100 s)内,0.5~30 Hz频段内,海洋环境背景噪声近似为正态分布[9],可令初始Δi=0,按照步骤1~步骤3统计高斯噪声信号Xt的方差σ,并按照3σ准则设定检测固定门限Δ=[Δ0,Δ1,…,ΔN],其中Δi=3σ. 仿真计算得到500组数据长度为512的高斯噪声信号,取频点数N=512、中值滤波器长度为5时,计算得到Xt的正态概率图如图4所示。

图4 高斯信号Xt的正态概率图Fig.4 Normal probability map of Gauss noise signal Xt
由图4可发现,Xt近似服从正态分布,这为利用3σ准则设定门限值提供了基础,计算得到σ的平均值为1.981 0.
3 试验验证
为了检验第2节方法的有效性,利用2012年7月~8月于烟台芝罘岛附近(经度121.433°,纬度37.589°,水深(20±3) m,海水电导率3.5 S/m)测量得到的轴频电场信号进行试验验证。试验中,3个轴方向的电极距均为1 m,测量系统选用美国Analog Devices公司生产的AD8224低噪声仪表放大器(频率为0.1~10 Hz,噪声峰- 峰值为40 nV)作为前置放大器,轴频电场信号总增益为80 dB,系统测量带宽为1~7 Hz(噪声峰- 峰值<200 nV),采样频率为20 Hz. 测试系统布置于航道附近,共获取上百航次船舶通过时产生的电场信号。4艘不同类型船舶(信息见表1,航速为岸基测距仪测量及估算值)依次通过时的轴频电场信号|E|如图5所示(纵坐标进行归一化处理),一段时间内的海洋环境电场数据如图6所示(原始电场值)。

表1 4艘船舶信息Tab.1 Information of four ships

图5 实测轴频电场信号|E|Fig.5 Measured shaft-rate electric field signal |E|

图6 实测海洋环境电场信号|E|Fig.6 Measured marine environment electric field signal |E|
由图5可发现,4艘船舶通过时的轴频电场信号强度差别较大,对其进行短时傅里叶变换,得到对数时频图如图7所示。由图7可发现,若采用固定门限值对线谱能量特征进行检测,则由于能量特征差别20 dB以上,较低的门限值将导致虚警率提高,而较高的门限值则将导致检测概率降低。

图7 舰船通过时的对数时频图Fig.7 Logarithmic time-frequency diagram of ship
采用第2节方法对图5和图6所示的电场信号进行检测,取t0内的采样点数为512(相当于每段时间窗为25.6 s),FFT变换的频点数N=512,M=20,R=18,t1=30 s;Δi=5.946 6,i=0,1,…,N,图5对应电场值滑动检测时计算得到的特征能量谱T如图8所示。对比图7和图8可发现,采用自适应门限判别后,在船舶出现时间段内,线谱特征能量谱的信噪比明显提高。此时,4艘船舶通过时的目标检测时刻分别为235.1~395.1 s、435.1~535.1 s、635.1~825.1 s和955.1~1 255.1 s. 假定目标为匀速直线运动,对4艘船舶的纵向探测距离分别为998.9 m、356.0 m、436.1 m和917.8 m(降低t1值探测距离将有所增加)。图6对应电场值滑动检测时计算得到的特征能量谱T如图9所示。由图9可发现,海洋环境噪声对应的特征能量谱没有明显的线谱特征,未检测到目标信号。有目标通过时,检测时刻内积分特征P的均值分别如图10所示。由图10可发现,这些船的积分特征P差别较大,为实现目标信号识别奠定了基础。

图8 有目标滑动检测时的特征能量谱TFig.8 Characteristic energy spectrum T with target
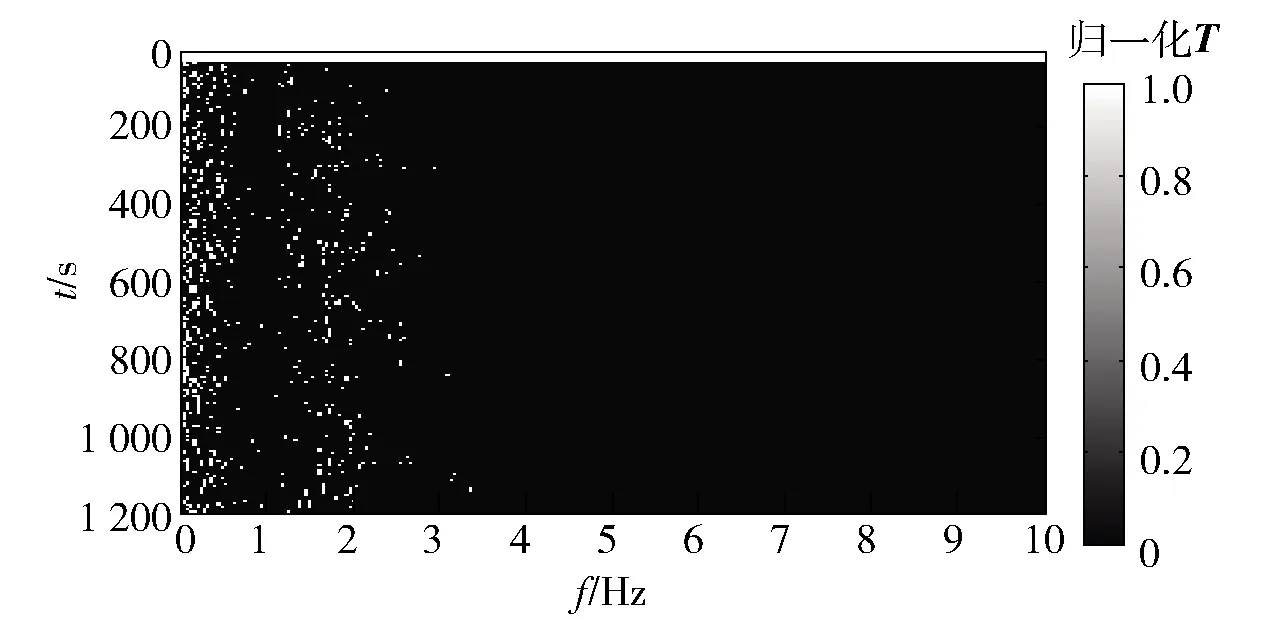
图9 无目标滑动检测时的特征能量谱TFig.9 Characteristic energy spectrum T without target
以图10得到的积分特征P均值为先验信息,取W=10、Δf=0.391 Hz,分别计算10艘船舶两两之间对应的欧氏距离,结果如表2所示。由表2可发现,不同船舶的欧氏距离差别较大,表明采用积分特征值能较好地实现对目标信号的分类。

表2 10艘船舶积分特征的欧氏距离Tab.2 Integral characteristics’ Euclidean distances of ten ships
图11、图12分别为2017年7月16日~18日渤海明珠号(见图13)3次不同正横距通过时的时域电场信号及其积分特征,其中,图11中的纵坐标进行了归一化处理,渤海明珠号3次通过时的正横距分别为80 m、160 m、75 m. 由图12可发现,对于同一艘船舶,其积分特征具有较好的一致性。取W=10、Δf=0.391 Hz,计算得到图12(a)、图12(b)、图12(c)之间的欧式距离均为0,从而实现了对同一艘舰船轴频电场信号的识别。

图11 渤海明珠号轴频电场信号Fig.11 Shaft-rate electric field of Bohaimingzhu ship

图12 渤海明珠号积分特征Fig.12 Integral characteristics of Bohaimingzhu ship

图13 渤海明珠号Fig.13 Bohaimingzhu ship
4 结论
为了实现对轴频电场信号的可靠检测,本文提出基于自适应线谱能量信号检测的方法,相比于传统固定门限检测法,该方法在频域上采用浮动门限与固定门限相结合的方法对疑似线谱信号进行检测,并利用线谱特征之间的欧式距离实现对目标的识别。对多艘船舶的试验数据验证结果表明,所提方法能够实现对目标信号的有效探测和识别。但是由于试验过程中未获取同艘目标不同航速时的轴频电场信号,下一步研究工作的重点是构建同一目标不同航速时的线谱能量识别方法,并基于线谱能量实现对目标的实时跟踪。
