基于混合蚁群算法的异质车队低碳VRP研究
2020-07-17张明伟屈晓龙
张明伟,李 波,屈晓龙,郭 盈
1.天津大学仁爱学院 管理系,天津 301636
2.天津大学 管理与经济学部,天津 300072
1 引言
随着我国社会经济的快速发展和人民生活水平的提升,机动车保有量也逐年攀升,随之而来的汽车尾气污染问题也日益突出。目前,机动车尾气污染成为雾霾形成的重要原因之一已形成共识[1]。社会需求促进了物流业的快速发展,载货汽车总吨位也在不断增加。与小型汽车相比,由于载货汽车吨位大、使用率高、行驶时间和距离长,所以,污染物的排放量也远大于其他小型车辆。如何优化载货汽车的配送调度方案,在对生产运输扰动最小的条件下,减少碳排放量,对大气污染治理具有十分重要的意义[2-3]。
为更加符合车辆运输的实际情况,本文从加入碳排放约束的车辆路径优化、异质车队和多路径选择(柔性路径)三个方面对减少大气污染的车辆路径优化模型进行分析研究。
首先是加入碳排放约束的车辆路径问题。在车辆路径问题(Vehicle Routing Problem,VRP)模型中加入碳排放约束,不仅符合国家节能减排政策,也可以降低车辆油耗,节约成本。Demir等[4]对减少车辆碳排放量的绿色运输路径优化研究进行了综述,指出货运车辆排放了大量污染物,考虑低碳的VRP可以显著降低车辆的温室气体排放,并指出车辆速度对单位碳排放量的影响比重远大于行驶距离和旅行时间。Hooshmand和Mirhassani[5]建立了时变网络下的车辆碳排放模型,并将加油决策纳入路线规划,结果表明,模型优化方案能够有效减少碳排放量。Wang等[6]建立了两级协同多中心车辆路径问题模型,提出了一种同时降低总运行成本和减少二氧化碳排放的三相方法。Kancharla和Ramadurai[7]建立了考虑负载、速度和加速度的燃油消耗模型。使用行驶循环速度替代平均速度,结果表明可节省8%~12%的燃油,从而减少碳排放量。Roberto等[8]建立了一个减少碳排放量的绿色VRP模型,加入了车辆速度、坡度等变量,在不产生额外运营成本的情况下实现了碳减排。
其次,一个载货车队通常由多种不同类型的车辆构成,不同类型的车辆在运载能力、油耗成本等方面存在较大差异,一般称之为异质车队。异质车队的VRP也是近年来研究热点,与同质车队相比,异质车队相关的VRP优化方案能够明显减少旅行成本和燃油消耗量,并减少温室气体的排放[9-12]。Susilawati等[13]以总行程成本和运营成本为目标,建立了包含服务等级的异质车队车辆路径规划模型,优化计算结果表明异质车队能够有效减少燃料成本,减少空气污染。葛显龙等[14]建立了考虑碳排放因素的多车型车辆路径模型。数值试验结果表明车速、车型和碳排放量约束对配送成本不可忽略。
第三个方面是柔性路径。在VRP优化过程中,当两个节点之间有多个路径可供选择时(柔性路径),也可以有效减少燃料消耗和CO2排放,目前,这方面研究较少,Tadei等[15]较早提出了多路径旅行推销员模型,模型中每对节点之间有多个随机旅行成本的路径连结,通过建立模型仿真计算得到运输效率提高,总旅行成本降低的优化方案;Huang等[16]提出了具有多路径的柔性(TDVRP-PF)的时间相关车辆路径问题模型,以成本和旅行时间为优化目标进行求解,结果表明该模型可以显著降低燃油消耗量,减少大气污染。
低碳VRP对满足企业节能减排的需求和降低油耗成本具有十分重要意义,异质车队的建立与柔性路径的选择是实现低碳VRP的重要途径。在实际运输过程中,异质车队与柔性路径是普遍存在的,异质车队中不同载重车辆单位行驶里程的碳排放量不同,柔性路径下车辆可以选择不同长度与速度的路径到达客户节点,从而产生不同的碳排放量。因此,异质车队与柔性路径可以对VRP优化过程中的碳排放量产生直接影响,并且在低碳VRP优化过程中二者相互作用,单一方面优化显然难以得到全局最优解。由于需要深入分析异质车队、柔性路径与低碳VRP之间的相互作用关系,且集成优化模型的构建与求解均较为复杂,因此,目前尚未看到相关的文献,但是以上相关研究成果为进行此方面探索提供了可供借鉴的理论和方法。
本文在上述分析基础上,提出了异质柔性低碳VRP(Heterogeneous Flexible Low-carbon Vehicle Routing Problem,HFLVRP)模型,即多种不同车型、不同碳排放量的异质车队,进行多路径选择的VRP模型。并且在模型中考虑了以下约束:(1)到访不同客户时,车辆的载货重量随货物卸载而动态变化,从而影响碳排放量。(2)在模型中,有些节点之间有多条路径可供选择,由于各个道路的质量和畅通程度不同,所以每条路径上车辆的平均行驶速度不同。(3)根据单条路径不同路段的道路质量和畅通程度,划分多个路段,不同路段,车辆的平均行驶速度不同。
2 问题描述
2.1 问题说明
HFLVRP可以描述为一个配送中心拥有一组不同车型、不同最大载重质量的异质车队,每辆车从配送中心出发,为不同客户提供派送服务,最后返回配送中心。配送中心及各个客户节点之间的路径具有不同行驶速度的限制,其中部分节点之间有多条路径可供选择。此外,部分路径从起始到终点过程中会出现较大的车辆平均速度的变化(例如从市区到郊区再到高速公路),这里将同一条路径中不同平均速度的部分划分为多个路段进行优化。为更加符合运输过程中的实际情况,在HFLVRP模型中考虑了以下问题:
(1)异质车队中不同车型的车辆,在不同行驶速度下的单位碳排放量不相同。英国交通研究所(U.K.Transport Research Laboratory)在研究报告[17]中指出,行驶速度是影响车辆碳排放量的最主要因素,不同车型的最低碳排放量,对应的行驶速度不相同,见图1所示。并且随着减少碳排放技术的发展,车辆整体的碳排放量会有所降低,但是碳排放量随车辆速度变化的关系基本不变,车辆总是有一个经济时速的范围。

图1 车辆的速度与碳排放量关系
由图1可知,在异质车队中合理分配各种类型的车辆,比如在客户收货时间窗口允许的范围内,在限速较低的道路上使用载重较小的车辆配送,可使该路径上的碳排放量有效减少。
(2)柔性路径下,合理匹配异质车队中的车型与路径,可降低碳排放量。柔性路径下,对于两个节点间存在多条不同速度路径的情况,如果路径长度相等,载重量较大的车辆选择平均速度较大的路径运输,载重量小的车辆选择平均速度较小的路径运输,则可以有效减少总碳排放量。如图2(a)和(b)所示。
同理,一辆车相同碳排放量下,其在两条路径上能够行驶的距离不同。以最大载重量为35 t的车型为例,在平均速度为75 km/h的路径上行驶,碳排放量为85.67 kg,行驶距离为100 km,如果在平均速度为50 km/h的路径上行驶,产生同样的碳排放量85.67 kg,行驶的距离则为113 km,如如图2(c)所示。
实际运输中柔性路径很常见,在满足配送时间前提下,减少碳排放量可以通过合理调度车辆类型和选择适合行驶速度的路径来实现。
(3)两个客户节点之间,同一条路径不同路段的平均速度不同。在实际运输过程中,同一车辆在两个客户节点之间行驶,可能经过不同的路段(如高速公路,城市内道路,郊区道路,县级、乡级公路等),由于各个路段的质量、车流密度等不同,其平均行驶速度也不同,所以使用两点之间运输距离的总平均速度来计算车辆的碳排放量不准确,如图2(d)所示,长度为300 km的路径,分路段计算碳排放量为258.21 kg,按照路径总平均速度计算则为248.26 kg,两者相差10 kg。
综上,HFLVRP模型不仅分别考虑了异质车队、柔性路径以及将路径分为不同平均速度的路段,对降低VRP模型中的碳排放量的影响,还考虑了上述因素的互相作用对碳排放的影响,并在模型中对上述因素进行了集成优化,来实现在VRP中降低碳排放的目的。
2.2 符号说明
(1)网络和路径:G=(V,E)为一个完全图,表示配送网络,V=(1,2,…,N)为节点集合,其中1表示配送中心,其余节点表示客户;E表示弧集,E={(i,j)|(i,j∈V且i≠j)};s表示节点i,j之间多条路径S中的一条路径,s∈(1,2,…,S);r表示路径s上不同速度的路段,r∈(1,2,…,R);表示i,j节点之间的s路径的r路段距离长度。
(2)车辆和碳排放:K表示车辆的集合,k表示车辆,且∀k∈K;qk表示车辆k的实时装载量;Qk表示车辆k的最大装载量;zi表示客户节点i的需求量,配送中心需求量z1=0;v表示车辆的平均行驶速度;εk(v)表示车辆k在速度v下的单位碳排放量;εu(v)和εl(v)分别表示车辆空载和满载情况下在速度v下的单位碳排放量;Φ(v)表示车辆在速度v下的负载因子。
(3)时间:在客户节点 j中,[σˉj,-σj]表示服务最早开始和最晚结束的时间窗口要求,和表示车辆k实际到达和离开的时刻。表示客户节点 j的服务时间,表示交接手续时间,表示卸载搬运的时间。
2.3 条件假设
(1)一定速度下,单位碳排放量与车辆货物重量的变化(如到达某一客户卸载部分货物)相关。
(2)车辆到达客户后,服务时间包括手续交接时间和卸载货物时间(与卸载量相关)。
(3)配送中心有足够的各类型异质车辆可供派遣。
(4)每个客户都须要服务到,且只接受某一车辆的一次派送服务。
(5)每个客户的需求量已知,且接受配送车辆到达有时间窗口限制。
(6)配送车辆有最大载重量限制,每次从配送中心出发,完成任务后返回配送中心。
3 模型构建
3.1 模型优化目标
模型以碳排放总量、车辆总旅行时间和车辆旅行路程最小作为三个优化目标。碳排放量是车辆类型、车辆行驶速度、车辆负载和车辆行驶里程的函数。企业在车辆调度过程中较为关注节约成本,如燃料成本、人工成本等。碳排放量与燃料消耗成本直接相关,且呈正比关系[18]。总旅行时间中除了车辆的行驶时间,还包含车辆到达客户节点的服务时间。车辆的总旅行时间最小化可以减少人工成本,提高车辆利用率,提升客户服务满意度。车辆旅行里程最小可以有效减少车辆的燃料消耗,减少碳排放量。
由于每增加一辆运输车辆,碳排放总量将明显增加,所以模型在优化过程中会自动减少车辆的使用,因此不必将车辆数量作为优化目标。
3.2 碳排放量的计算
一定类型车辆的单位碳排放量和燃料消耗相关,燃料消耗量和海拔、道路坡度、风阻及载重量等密切相关,而这些因素均会影响车辆的行驶速度,因此,现有研究大多通过建立车辆行驶速度和碳排放之间的拟合函数来计算碳排放量[19]。考虑到随着减排技术的进步,车辆整体碳排放量会不断减少,但是碳排放与速度之间的关系基本不会发生变化,因此可以通过减排发展系数来调整不同时期车辆的碳排放量。本文使用英国交通研究所(U.K.Transport Research Laboratory),通过大量的试验分析给出的不同类型车辆速度与碳排放的拟合函数及相关参数[17],车辆在空载时的碳排放量εu(g/km)与行驶速度v(km/h)的关系见公式(1):

本文采用载重量分别为5、10、20、35 t的异质车辆进行配送运输,(a0,a1,…,a6)取值如表1所示。

表1 不同车辆空载碳排放量εu的相关系数
载货汽车的碳排放量受载重质量的影响较大,文献[17]中通过负载因子Φ(v)来计算车辆在满载情况下的碳排放量εl(v),如公式(2)所示:

在忽略道路坡度影响的情况下,负载因子Φ是车辆速度v的函数,不同载重量的车辆负载因子与速度关系如图3所示。可以看出,载重16 t以下车型的车辆,其负载因子与速度相关性较为明显。负载因子函数的计算见公式(3),相关系数取值如表2所示。


图3 不同车辆的负载因子与速度关系

表2 不同车辆负载因子Φ的相关系数
通过负载因子,可以计算车辆载重量随卸载货物而减少的动态碳排放量,如公式(4)所示:

3.3 服务时间的计算
车辆在配送过程中,和分别表示车辆k到达和离开客户节点j的时刻,模型的时间优化目标是在保证客户的需求时间窗口条件下,车辆总旅行时间以及车辆在客户节点的服务时间之和最小。其中,服务时间包括到达客户节点j的交接手续时间和装卸搬运时间。车辆k到达客户节点j的服务时间的计算如公式(5):

其中,装卸搬运时间与客户j的需求量zj成正比,交接手续时间为一常数。
3.4 模型建立
模型的目标函数为:


公式(6)为碳排放量优化目标,表示车辆在所有旅行路径上的碳排放量之和最小;公式(7)为完成时间优化目标,表示车辆行驶时间及客户服务时间之和最小;公式(8)为旅行总路程最小。
目标函数约束条件为:

公式(9)表示所有客户节点都被访问到,且只访问1次;公式(10)表示任务车辆每次从配送中心出发,直到访问完成所有分派节点后,必须返回配送中心;公式(11)表示车辆在客户节点完成任务后必须离开;公式(12)表示车辆访问客户节点的时间窗口约束;公式(13)表示不同车型车辆的最大载重量约束;公式(14)表示车辆行驶不同路径的决策变量。
4 算法设计
旅行商问题很早就被证明是NP完全问题[20],难以使用数学解析方法求得较优解。旅行商问题是VRP的特例,所以VRP也是NP完全问题。本文提出的HFLVRP模型在传统VRP基础上增加了异质车队、柔性路径、碳排放量、动态负载、服务时间窗口等约束,使得模型的求解更加复杂。
智能优化算法在求解NP完全问题上具有很好的效果,其中,蚁群算法(Ant Colony Optimization,ACO)在求解旅行商问题时效果较为明显[21]。ACO是一种较新的分布式智能优化算法,其特点是利用蚁群每次选择信息素浓度较强的路径来构造可行解,算法带有较强的记忆性。但是ACO每次都需要重新构造路径和更新信息素浓度,且容易出现停滞现象,因此算法效率较低,而且无法复制保留完整的较优路径的信息。粒子群算法(Particle Swarm Optimization,PSO)也是一种分布式智能优化算法,其根据两个极值:粒子最优解 pbest和全局最优解gbest来更新粒子,寻找较优解。PSO具有简洁、收敛速度快,能够保留复制较优粒子路径信息的特点,其粒子更新也具有方向性。
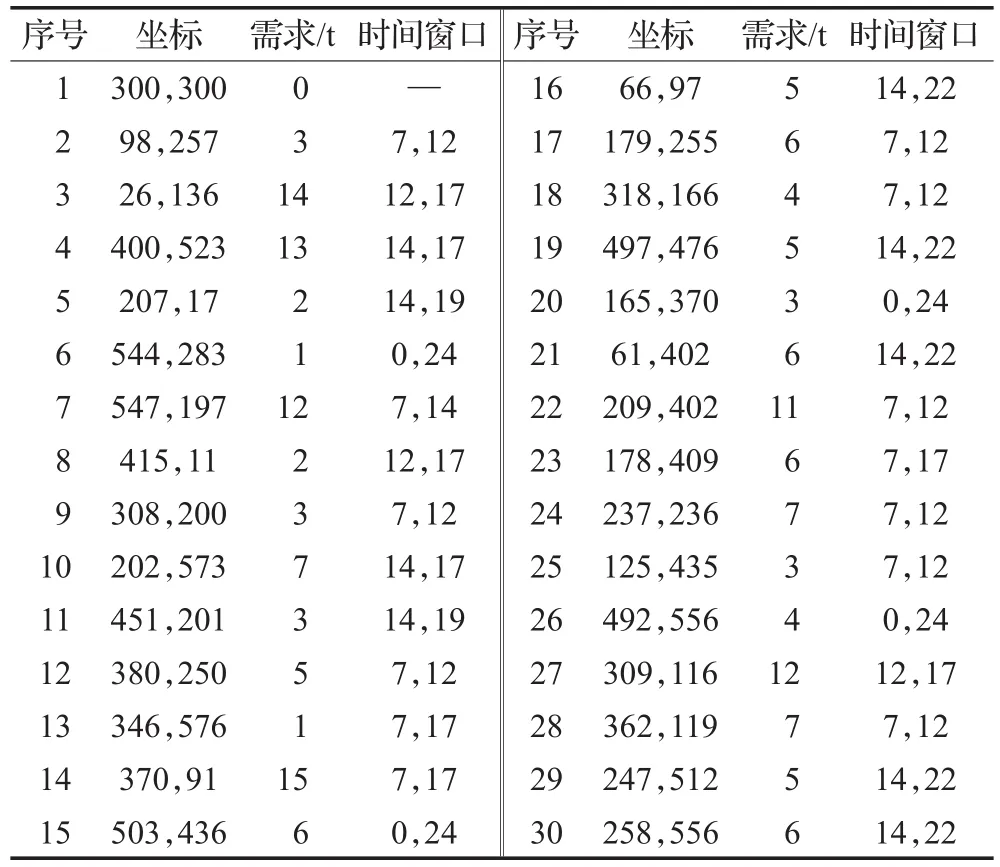
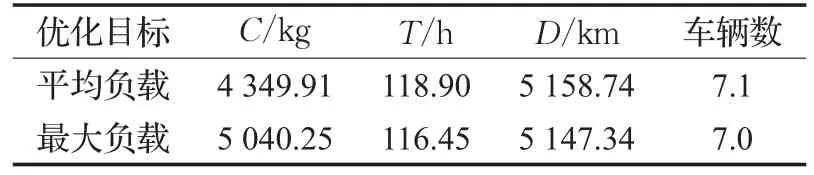
为加强算法的全局搜索能力,避免算法由于收敛速度过快或者陷入到局部最优难以跳出,本文提出在ACPSO流程中增加模拟退火算法中的Metropolis抽样准则,当 f[pbesti(t)] 本文将ACO和PSO算法的特性结合,提出混合AC-PSO算法,使用ACO中的路径信息素浓度更新方式作为PSO中粒子的更新方向,AC-PSO能够提高算法的收敛速度,提高算法效率,同时保持了粒子更新的方向性。AC-PSO的流程如图4所示。 图4 混合AC-PSO运算流程 算法中的粒子和可行解采用实数编码,由于单个粒子涉及的信息较多,因此采用矩阵来表示不同信息种类,编码方式如图5所示。 图5 实数编码矩阵 实数编码矩阵中第一行表示车辆经过的路径节点信息,其中“1”表示配送中心。如图5中第一行[1,4,3,1,2,5,12,7,1,…]表示车辆从配送中心出发,经过节点4和节点3,完成任务后返回配送中心,另一车辆经过的节点是2、5、12、和7;第二、三行实数中“0”表示不同车辆单回路配送的分隔标记,第二行中的20和35分别表示两个回路车辆型号的最大载重量;第三行表示两个节点之间有多条不同的路径可以到达(柔性路径),其中数字1、2和3表示选择的两点之间的第几条路径。例如节点1到2选择了第2条路径,节点5到12选择了第3条路径。 在AC-PSO中,粒子更新既要保留一部分粒子的自身优良特性,还要按照一定的方向性对粒子部分内容进行更新,本文采用单点更新的方式,即在粒子可行解中产生一个随机点Rand,如图6所示。为保证更新后的粒子仍然是可行解,将随机点之前的部分直接复制保留,将随机点之后的部分按照ACO中信息素浓度更新方式重新构造,通过信息素浓度变化来保持粒子的方向性。 图6 粒子更新方式 迭代过程中,对粒子Rand点之后的实数进行重新编码,车辆k经过节点i到达节点j,并且选择了路径s的概率为ρksij(t),其计算如公式(16): 式中,allowedj'表示Rand点后面未访问的节点客户,)表示能见度,是车辆k从节点i到节点j选择路径s行驶时,产生的碳排放量、行驶时间、节点j服务时间以及行驶的路径长度的函数,其计算方法如公式(17): 式中,γ1、γ2和γ3为调节碳排放量、旅行里程和旅行时间之间数量级系数,λ1、λ2和λ3为三者之间的权重系数。τksij(t)表示车辆k从节点i出发到节点j选择路径s的信息素浓度,τksij(t)更新方式如公式(18): 式中,W表示ACO中蚂蚁的数量,μ表示路径上信息素的蒸发速率,0<μ≤1。如果第w只蚂蚁由节点i到节点j选择了路径s和车辆k,则: HFLVRP是多目标优化模型,存在Pareto解集,因此在构造适应度函数时需要考虑三个优化目标的数量级关系和三者的权重系数。本文采用了自适应的方式调整数量级关系的适应度函数f(t),如公式(20)所示: 式中C、T和D分别表示可行解t的碳排放总量、总旅行时间和总旅行路径长度。 为验证HFLVRP模型的适用性和算法的有效性,本文采用计算机随机算例数据的方法,在直径300 km区域内,随机产生30个节点的坐标,如表3,其中节点1为配送中心,坐标(300,300),在区域中心。其他29个节点为客户节点,其需求量为1~15的随机正整数。客户节点接受车辆到达时刻为一个时间窗口,例如(7,12)表示上午7点到中午12点之间可以接受服务,即车辆7点之后可以到达,12点之前必须离开。(0,24)则表示任意时间均可接受服务。 表3 随机产生节点的坐标、需求量和时间窗口 这里假设所有车辆在早上6点出发,并且货物需要在6点开始之后的24小时之内完成配送。 假设节点A到B与节点B到A的路况一致,根据节点坐标计算两点间直线距离,则30个节点共产生435条路径,将这些路径作为两节点间初始的第一条路径,再根据这些路径随机生成柔性路径。首先假设所有路径的平均行驶速度均为75 km/h,且只有一条路径,然后在这些路径中随机选取其中10%,共44条路径(如表4)产生以下变化: 表4 柔性路径的速度和路段长度 (1)有些路径行驶速度改变,变化幅度为35~70之间5的整数倍,例如表4中的路径1-2、1-23等。 (2)有些路径划分为了不同速度的路段,例如表4中的路径3-23,速度“55(24),75(70),35(6)”表示路径分为了三段,第一段行驶速度为55 km/h,路段长度占总路径长度的24%;第二段行驶速度为75 km/h,路段长度占总路径长度的70%;第三段行驶速度为35 km/h,路段长度占总路径长度的6%。 (3)某些节点之间存在柔性路径,即有二条或者三条平均行驶速度不同的路径,例如表4中路径1-9、1-15等。柔性路径的长度绝大部分也不同,其第一条路径为两点间直线距离,第二条或第三条路径的长度按照第一条路径的±15%随机产生,如表5所示。 还有一些路径混合了上述3种变化,为了测算一条路径划分路段与不划分路段,车辆在碳排放量与行驶时间方面的差别,对上述算例中的含有分路段的路径进行了计算分析。同一条路径,分别按照划分路段和不划分路段的方式进行计算。车辆按照路径中所有路段的平均速度行驶,分别选择载重量为5、10、20和30 t的车辆经过所有路段,计算结果表明,与划分路段相比较,若不划分路段,相同的行驶里程,车辆碳排放量差别的绝对值为3.58%~4.61%,车辆行驶时间差别为4.25%。测算结果表明在模型中如果不划分路段,会对优化结果会产生一定影响。 表5 柔性路径的第二、三条路径长度 km 本文以Matlab7.0为工具,对HFLVRP模型和ACPSO进行编程和仿真运算。碳排放、旅行时间和里程最小3个优化目标权重系数λ1、λ2和λ3取值均为1。服务手续交接时间取值为0.35 h,装卸搬运时间取值为0.2 h/t。运算规模及模型约束条件等因素的变化会对算法的参数取值产生较大影响,本文采用均匀设计试验[22]的方法来确定AC-PSO中参数取值,初始种群规模设置为600,在更新迭代过程中,权重α和β均取值为1,信息素蒸发率μ取值为0.55,初始退火温度Γ初始取值为2 000,算法的终止条件为:当进行1 000次迭代运算后,算法的适应度函数值不再变化,则算法终止。 对HFLVRP模型优化仿真30次,优化结果取平均值,C、T、D及车辆数如表6所示。 表6 HFLVRP模型优化结果 取其中一个HFLVRP模型优化结果进行分析,车辆行驶路径及使用车型如表7所示,其中“多路径”列中的数字1、2、3分别表示经过了柔性路径的第一、二、三条路径。配送车辆从6点开始出发,到达和离开节点的时刻如表8所示(大于24为第二天到达)。 表8 车辆到达和离开节点的时刻 多目标函数的Pareto解和优化目标的权重系数相关,HFLVRP模型中碳排放、旅行时间和里程最小3个优化目标,其权重系数主要和运输企业对三者的重视程度有关,为了给企业提供不同权重下三个优化目标的求解范围参考,本文采用文献[23]中的方法求解分析HFLVRP模型的多目标Pareto解集。即在算法中创建一个Pareto非支配解集合,根据Pareto支配关系对种群进行帕累托分级,将级别最高的解放入Pareto非支配集合中,若非支配解集规模超过设定值,则进行修剪。利用上述方法求解HFLVRP模型的Pareto解集,得出10个Pareto非支配解,如表9所示。并求得碳排放、旅行时间和里程三个优化目标的极小值分别为4 002.6 kg、106.4 h和4 926.7 km。 表9 Pareto非支配解集 为了验证AC-PSO算法有效性,对5.1节中的算例数据,分别使用遗传算法(Genetic Algorithm,GA)、PSO算法和ACO三种方法进行仿真运算,采用CPU 3.2 GHz,内存8 GB,64位Windows7操作系统的计算机,GA中采用实数编码,交叉概率0.2,变异率0.05;PSO中惯性权重0.73,两个加速因子均为1.21;ACO算法取值与ACPSO相同。计算结果取30次计算的平均值,如表10所示,可以看出AC-PSO在计算耗时和标准差方面继承了PSO和ACO的优点,综合计算结果表明AC-PSO算法对HFLVRP模型优化效果较好。 表10 HFLVRP模型算法效果比较 为进一步对比分析算法的有效性,本文从TSPLIB中选取3个经典实例进行测试,算法参数取值与前面HFLVRP模型中采用的对比算法相同,结果如表11所示。 表11 TSP模型算法效果比较 由表11可以得出,AC-PSO对TSP以及VRP问题的优化计算具有较好效果。 为了验证HFLVRP模型的有效性,本文对同质车队与异质车队、柔性路径与非柔性路径、固定负载与动态负载分别进行了仿真对比分析。每个仿真模型的结果均取30次仿真的平均值。 (1)在HFLVRP模型中保持其他条件不变,采用车辆载重量均为20 t和均为35 t的同质车队(由于部分节点需求量大于10 t,因此同质车队不能采用10 t及以下车型运输)。仿真优化结果如表12所示。 表12 同质车队仿真优化结果 由表12可以得出,与异质车队仿真结果相比,采用载重量为20 t和35 t的同质车队运输,仿真优化后行驶的总时间和总里程变化不明显,但是碳排放量分别增加了14.9%和6.1%,并且载重量20 t的车队需要约9辆车运输。 (2)其他条件不变,将两节点间随机选择柔性路径,改为只选择多路径中最短的一条进行运输,仿真优化结果如表13所示。 表13 最短路径运输仿真优化结果 由表13可以看出,多路径中选择最短路径运输,虽然车辆旅行里程数略有减少,但是与HFLVRP中的柔性路径相比,碳排放量增加了6.6%。 (3)HFLVRP模型中,将车辆重量随货物卸载而动态变化的动态负载,改为两类固定负载:一类固定负载取值为平均负载,即车辆出发时货物重量的一半,另一类固定负载取值为车辆的最大载重量,模型中的其他条件均保持不变,然后进行仿真优化计算,结果如表14所示。 表14 固定负载仿真优化结果 由表14可以看出,HFLVRP模型中动态负载碳排放量与固定负载中的平均负载和最大负载相比较,分别降低了3.4%和6.1%。因为,如果采用动态负载,在模型优化过程中可以通过调整车辆行驶路径,在负载较大时选择较短路径优先配送,负载较小时再选择较长路径配送,所以能够降低整体碳排放量。 综上,在模型中综合考虑异质车队、柔性路径、动态负载及划分路段等因素、变量,在旅行时间、里程变化不大的情况下,能够明显降低碳排放量。 HFLVRP模型针对如何减少货运车辆在配送过程中的碳排放问题,结合生产运输实际,在优化过程中综合考虑了异质车队、柔性路径、动态负载等因素,并作为优化的关键变量,即载重量大、装载货物多的车辆选择速度较快的路径,载重量较小、装载货物少的车辆选择速度较慢的路径,从而减少整个运输过程中的碳排放量。模型以碳排放量、旅行时间和旅行路程作为多优化目标,并且设定了配送时间窗口和划分路段计算行驶速度的约束条件。 蚁群算法与粒子群算法都是带有记忆性的群搜索算法,本文提出AC-PSO使用蚁群算法的信息素强度更新方式来保持种群的记忆性,同时结合了粒子群算法快速收敛的特性,针对HFLVRP设计了编码解码方式,最后,通过算例仿真计算对比分析,结果表明模型中考虑异质车队、柔性路径和动态负载可以在总旅行时间和总旅行路程变化不大情况下,使碳排放总量显著降低。 本文模型未考虑不同载重量的车辆转运问题。后续研究可以考虑在速度较快的道路上使用载重量大的车辆运输,当行驶到速度较慢的道路时,在转运站将货物派送多个载重量较小的车辆,以减少配送车辆的碳排放总量。城市配送由于拥堵程度不同,可以划分为不同速度的时区,可以通过合理组合时区来达到减少车辆碳排放的目的[24],后续也可以考虑在时变城市配送模型中,研究HFLVRP模型的调度问题。

4.1 算法编码方式

4.2 粒子的更新方式





4.3 适应度函数

5 仿真算例
5.1 算例数据


5.2 仿真结果







6 结束语