浮式保障平台混合定位系统时域模拟研究
2020-07-13韩旭亮谢文会
韩旭亮, 谢 彬, 谢文会
(中海油研究总院有限责任公司,北京 100028)
0 引 言
当今世界人口和经济的快速增长,使得人类对海洋油气资源的需求量在不断加大,海洋开发范围也逐渐从沿岸、近海,扩展到了更深的远海,运动性能优良、安全可靠、经济性好的浮式保障平台可以为深远海油气资源开发提供强有力的装备支撑。传统的锚泊定位[1]方式是将锚抛向海底,利用锚爪抓住海底的泥土,通过锚链的张力来限制平台的运动。锚泊定位精度不高,机动性能较差,需要考虑海底的土力工况,受环境影响较大。随着作业水深不断增加,海上布锚作业困难,作业周期和费用较大,锚链长度和强度增加会使其重量急剧增加。同时因为技术上存在局限性,经济性较差。动力定位[2-3]方式虽然能适应各种水深的定位要求,定位成本不会随水深的增加而增加,但是其建造要求高,维护保养成本高,适应极端海况条件能力有限。因此,将被动式锚泊定位系统和主动式动力定位系统取长补短,提出锚泊辅助动力定位系统[4-8]。该混合式定位系统不但能够抵抗更大的极限海况,还能提高定位精度,两者相互配合以实现平台定位功能,减少燃油能源消耗,安全性和经济性较好。
通常动力定位系统的定位能力是指平台的静态定点定位能力,主要考察推进器能否产生合力(矩)以抵消环境外载荷,其量化评估指标主要是定位能力曲线[9]。然而,混合定位系统中包含被动式锚泊系统,其回复力与平台运动偏移之间的关联复杂。因此,静态方法不再适用于评估混合定位系统,需要采用时域模拟方法进行动态评估研究。国外对混合定位系统的研究起步较早,发展相对成熟,在该定位系统方面已经形成了较为完备的技术方法和相关规范,有相对成熟和稳定的DP-M系列产品。然而,国内许多学者重点从浮体在混合定位系统下的运动响应、功耗水平、不同定位系统的定位能力对比以及推进器布置方式等方面开展相关研究[10-14]。在国内研究中处于起步阶段,还停留在理论研究状态,与国外相比还有很大差距。
本文以一艘船型浮式保障平台为研究对象,采用时域模拟方法计算分析混合定位系统下船体的运动响应和推力响应,并与相同海况下动力定位系统进行对比。混合定位系统可以提高定位进度,节省能耗费用,具有绿色环保的意义。
1 理论基础
1.1 时域运动响应方程
在复杂环境条件的风、浪、流联合作用下,混合定位系统船体时域运动响应方程可以表示为
(1)
式中:m为船体惯性质量矩阵;A∞为无穷大频率附加质量系数矩阵;K为脉冲响应函数矩阵;C为刚度矩阵;η为船体运动响应;Ftotal为总外力,包括风载荷、流载荷、波浪力、锚泊缆索张力和推进器推力。
1.2 环境载荷
水面以上的船体和上部模块受到风载荷作用,风力Fwx、Fwy和风力矩Mwn的计算公式[15]如下:
(2)
(3)
(4)
式中:ρa为空气密度;Cwx为纵向风载荷系数;Cwy为横向风载荷系数;Cwn为艏摇风载荷力矩系数;Awf为船体纵向投影面积;Awl为船体横向投影面积;Uw为相对风速;Loa为船体总长。
水面以下的船体湿表面受到流载荷作用,流力Fcx、Fcy和流力矩Mcn的计算公式[15]如下:
(5)
(6)
(7)
式中:ρw为流体密度;Ccx为纵向流载荷系数;Ccy为横向流载荷系数;Ccn为艏摇流载荷力矩系数;Acf为船体纵向投影面积;Acl为船体横向投影面积;Uc为相对流速。


(8)
式中:h(1)为线性脉冲响应函数;h(2)为二阶脉冲响应函数;ζ为入射波浪。
1.3 混合定位系统
混合定位既有锚泊系统缆索提供回复力,又有动力定位系统推进器提供推力。它们共同作用于船体,将其运动位移限制在一定的作业区域。
锚泊系统运用细长杆理论,建立锚泊缆索动力分析有限元模型,将杆件控制方程离散为含有节点未知变量的代数方程组,采用Newmark-β方法求解动力响应方程,进而得到锚泊缆索张力FMO[17]。
动力定位系统运用PID(Proportional Integral Derivative)控制理论,在纵荡、横荡和艏摇三个自由度上进行控制,推进器推力FDP可以表示为
(9)
ΔQ(t)=X0(t)-X(t)
(10)
(11)
式中:Kp为微分增益系数;Kd为比例增益系数;Ki为积分增益系数;X0(t)为目标位置;X(t)为滤波位置;ΔQ为位置偏差。将经过卡尔曼(Kalman)方法滤波得到的结果输入PID控制器,根据推力分配策略[2]将动力定位控制系统输出的推力分配到各个推进器上,采用拉格朗日乘数法计算最优化问题,获得推进器推力分配的结果。
2 研究模型
2.1 船体参数
本文选择一艘船型浮式保障平台为研究对象,它通常在特定海域对海洋油气资源开发所需物资进行补给保障。船体主尺度为270 m,型宽为48 m,型深为24.0 m。船体的横摇惯性半径R44为16.0 m,纵摇惯性半径R55为67.5 m,艏摇惯性半径R66为67.5 m。船体初始方向角为-30°,工作水深为320 m。
2.2 锚泊及推进器参数
浮式保障平台为单点系泊系统和动力定位系统联合定位。锚泊系统总共由12根锚泊缆索组成,采用单点分散锚泊方式,导缆孔坐标为(36.6 m, 0.0 m, -16.5 m)。表1给出了锚泊系统的材料参数和力学分析相关参数。
船体选用6个相同全方位推进器辅助锚泊,分别布置在艏艉底端各3个,每个推进器的最大推力为1 200 kN。其中,1号推进器D1的坐标为(-128.9 m, 0.0 m, -20.5 m), 2号推进器D2的坐标为(-122.9 m, 8.0 m, -20.5 m),3号推进器D3的坐标为(-122.9 m, -8.0 m, -20.5 m),4号推进器D4的坐标为(106.3 m, 8.0 m, -20.5 m),5号推进器D5的坐标为(106.3 m, -8.0 m, -20.5 m),6号推进器D6的坐标为(111.9 m, 0.0 m, -20.5 m)。图1给出了推进器和锚泊点布置位置。
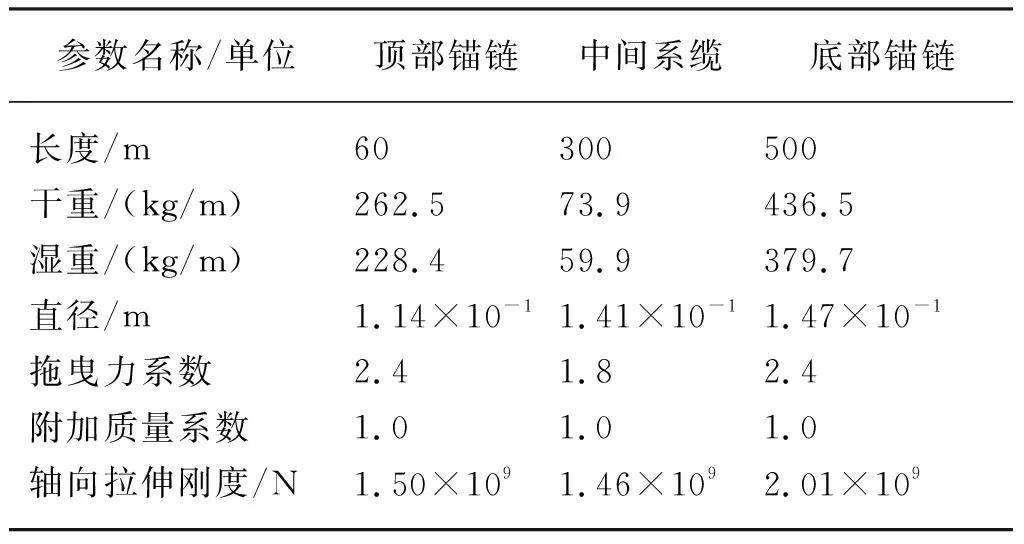
表1 锚泊系统主要参数
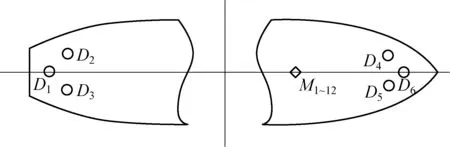
图1 推进器和锚泊点布置位置Fig.1 Arrangement of thrusters and mooring
2.3 环境条件参数
计算中环境条件参数按照IMCA规范给出的波浪有义波高、波浪周期与风速的统计关系进行选取,同时采用JONSWAP波能谱模拟不规则入射波浪。
表2给出了海况环境参数,有义波高Hs为6.12 m,谱峰周期Ts为11.61 s。在风、浪、流的非共线海况下,浪向为180°,风向为150°,流向均为135°。
采用NPD风谱计算风载荷,用于所有风谱的风剖面可以表示为
(12)
式中:参考高度zr为10.0 m;平均风速ur为17.5 m/s;高度系数a为0.11;u0(z)为高度z处平均速度。参考高度zr为10.0 m,摩擦系数为0.002,如表3所示。表4给出了高度和流速关系的流载荷参数。
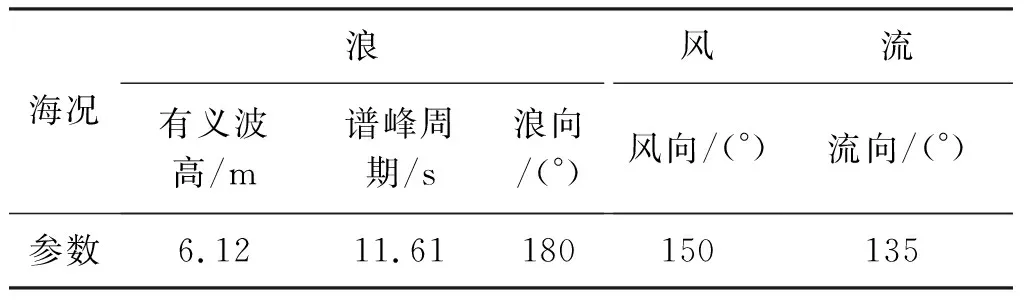
表2 海况环境参数
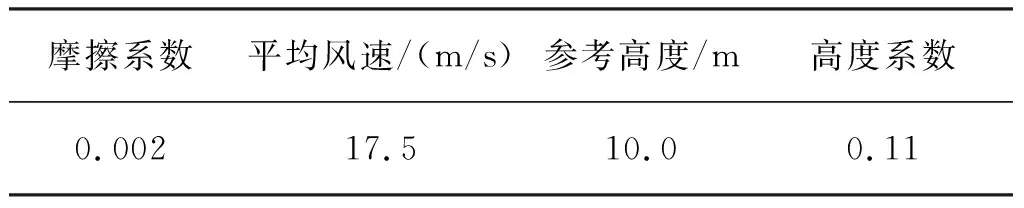
表3 风载荷参数

表4 流载荷参数
3 模拟计算方法
采用SESAM软件,对混合定位系统浮式保障平台在风、浪、流联合下的船体运动响应、推进器推力响应进行时域模拟,能更加直观、准确地评价其定位性能。图2给出了混合定位系统计算流程。首先,使用GENIE模块建立浮体模型;其次,使用HYDROD模块进行浮体水动力计算;再次,加入流载荷和风载荷,采用风前馈控制风载荷,使用RIFLEX模块计算锚泊系统张力;最后,使用SIMO模块进行卡尔曼滤波来评估位置传感器测量值,得到浮体低频运动状态,将其与设定状态偏差的结果输入控制器RKMAT,更新计算模型,设置推进器参数和动力定位参数,控制器GMAT进行推进器推力分配,从而计算求得相关计算结果。
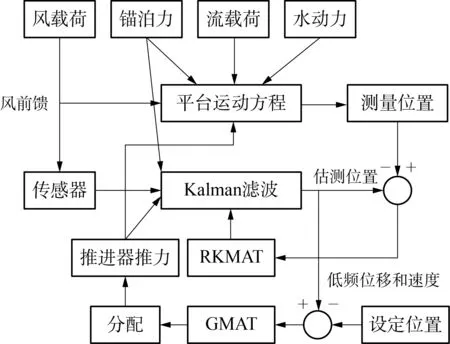
图2 混合定位系统计算流程Fig.2 Calculation flow of hybrid positioning system
在斜浪海况作用时,对浮式保障平台混合定位系统进行时域模拟,并与相应工况下的动力定位进行比较。设定浮式保障平台作业定位点的横坐标为-2.0 m,纵坐标为2.0 m,艏向坐标为0°。
4 计算结果与分析
表5给出了在风浪流斜浪海况作用下,浮式保障平台在动力定位和混合定位系统下的运动响应特性。从表5中可以看出,在动力定位和混合定位模式下,利用推进器自身推力抵消风、浪、流的影响,可以使得平台运动响应平均值保持在设定位置(-2 m, 2 m, 0°)附近。相对单独使用锚泊定位的系统来说,这两种定位系统都能产生更好的定位效果[12]。混合定位和动力定位相比,就定位精度而言,两种定位系统的差别不大,平均值基本都稳定在设定的作业定位点附近。但是,从平台运动响应最大值和最小值来看,混合定位相比动力定位的水平漂移有相应的减小,具有更稳定的定位精度和更好的定位能力。
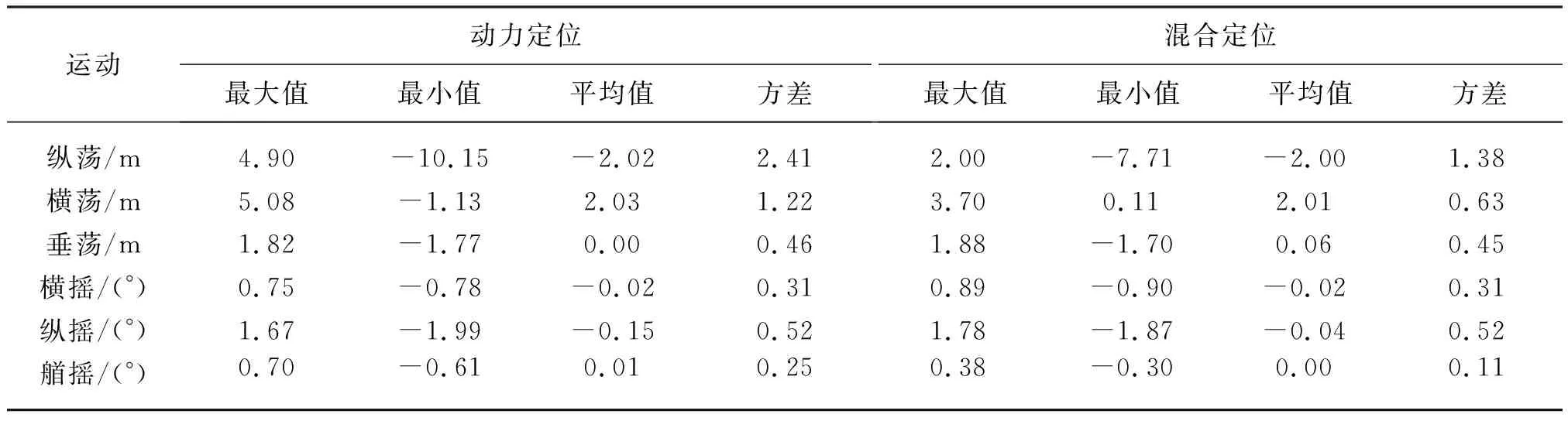
表5 船体运动响应特性
由于浮式保障平台的纵荡、横荡和艏摇会在平均位置附近发生随自身固有周期变化的往复运动,这对系统推进器推力会产生显著的影响。表6给出了在风浪流斜浪海况作用下,动力定位和混合定位系统下推进器推力响应特性。从表6可以看出,混合定位与动力定位方式相比,各个推进器推力均有明显减小。其中,1号推进器、3号推进器和5号推进器的推力平均值分别降低了16.11%、 15.86%和10.36%。这主要是由于混合定位中的锚泊定位系统提供了大量的恢复力,从而减轻了动力定位系统推进器负荷,大大降低了动力定位系统中推进器抵消低频载荷所需要的推力。

表6 推进器推力响应特性(单位:1×105 N)
图3给出了在风浪流斜浪海况作用下,浮式保障平台在动力定位和混合定位下船体重心位置参考点的运动轨迹。结合上述浮式保障平台运动响应特性的分析,可以看出,混合定位与动力定位相比,可以显著提高定位精度,使得浮式保障平台能长期稳定在设定的作业定位点附近,并且这两种定位方式都优于单独使用锚泊定位系统[12]。
5 结 语
本文以一艘船型浮式保障平台为研究对象,采用时域模拟方法,重点探讨了混合定位系统对浮式保障平台的船体运动响应和推进器推力响应,并与相同海况下的动力定位进行了对比。研究结果表明:混合定位系统与动力定位系统相比,定位能力强,能取得更稳定、更高的定位精度。混合定位系统能显著降低推进器所需推力,有效减少动力定位系统燃油消耗,具有较好的安全性和经济性。锚泊系统成本随着水深会不断增加,如果浮式保障平台作业地点相对固定,工作深水在合理范围内时,混合定位系统无疑是一种最节能且最稳定的定位方式,具有良好的优越性和绿色环保的意义。
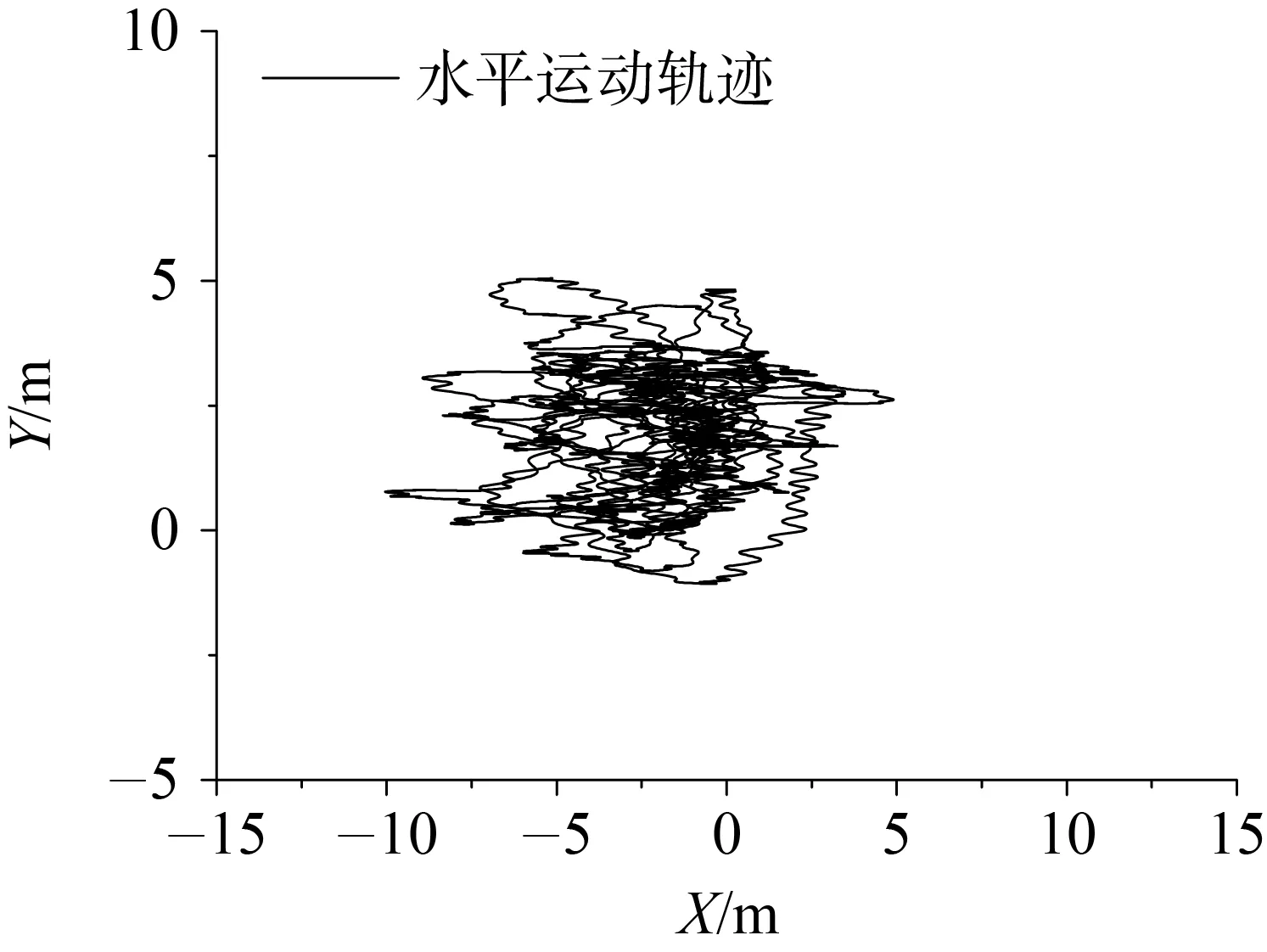
(a)

(b)