工业机器人叉型手腕的机械结构设计
2020-07-09徐会正
徐会正
(清研同创机器人(天津)有限公司,天津,300300)
0 引言
随着工业机器人需求量的日益剧增,国内工业机器人的发展也非常迅速,但相对于工业机器人“四大家族”还存在一定的差距,特别是机械本体方面的差距。工业机器人本体设计主要在于手腕的机械结构设计,本文就工业机器人常用的叉型手腕机械结构设计进行阐述。
1 工业机器人叉型手腕机械结构设计
工业机器人的手腕结构有多种形式,包括中空手腕结构(3R),如图1a[1];Lemma手腕结构(BBR),如图1b[1];叉臂手腕结构(RBR),如图1c[1];此外,还有各种各样的变形手腕结构形式等。本节主要介绍工业机器人手腕常用的叉型结构。

图1 工业机器人手腕结构类型
1.1 常用的叉型手腕结构
工业机器人叉型手腕结构中常用的叉型结构传动原理如图2。该传动结构是众多机器人普遍采用的传动方式,特别是国产机器人厂家最初设计的样机都是此种传动结构。该结构也有一些变形,如四轴传动的同步带可以是齿轮传动,五、六轴的同步带传动也可以是齿轮传动,而且可能是二级或者三级齿轮传动,以省去五轴或六轴的减速器,降低成本。
四轴减速器可以是中空减速器,方便穿缆走线。若不是中空减速器,需要增加一连接件,采用普遍应用的U形走线方式来穿过五、六轴电机的线缆。
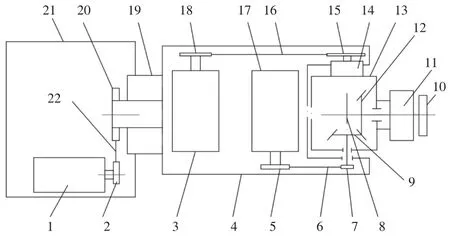
图2 常用的叉型手腕结构传动简图
机器人常用叉型手腕结构具体实施方案可参考图3[2](五、六轴传动结构),图4是四轴传动结构[3]。
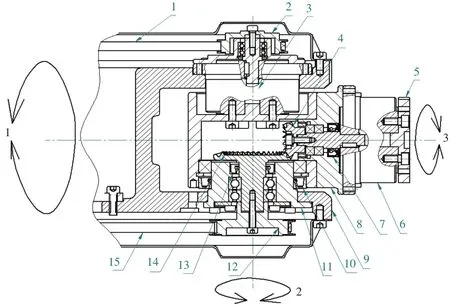
图3 机器人常用叉型手腕结构
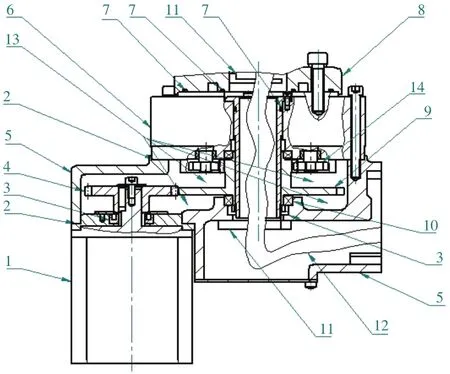
图4 四轴传动结构图
1.2 简单实用的叉型手腕结构
在叉型手腕中还有一种经常被采用的传动结构,该传动结构简单实用,是国产机器人常采用的传动方式之一,其传动原理如图5所示。
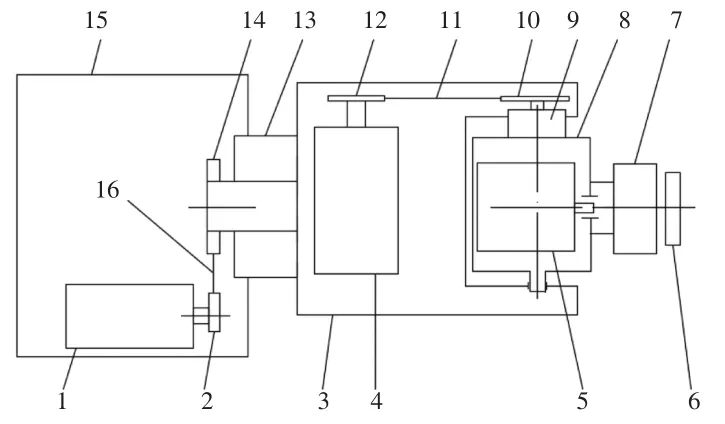
图5 简单实用的叉型手腕结构传动简图
该手腕结构与图2结构相比,减少了一对锥齿轮,因此设计难度和制造加工装配难度降低,同时降低噪声,但会使手腕壳的体积增大;在图5中,“11”处的五轴同步带传动也可以是齿轮传动方式等。
这种手腕结构的具体实施方案见图6[2],该方案中五轴减速机与五轴电机直联,可以减少机器人小臂的横向宽度,但这只适用于低负载的机器人结构(6kg以下),此外,该方案中连杆结构可以去掉,只保留同步带传动。若末端负载超过6kg,最好将五轴减速器设计到五轴的旋转中心处,这样更能保证机器人的精度。
在国内,采用该手腕类似结构的机器人公司有山东时代新纪元机器人有限公司(以下简称山东时代新纪元)、上海新时达机器人有限公司(以下简称上海新时达)、南京埃斯顿自动化股份有限公司(以下简称南京埃斯顿)、欢颜机器人(上海)有限公司(以下简称上海欢颜)、山东泰开机器人有限公司、华数机器人有限公司等。
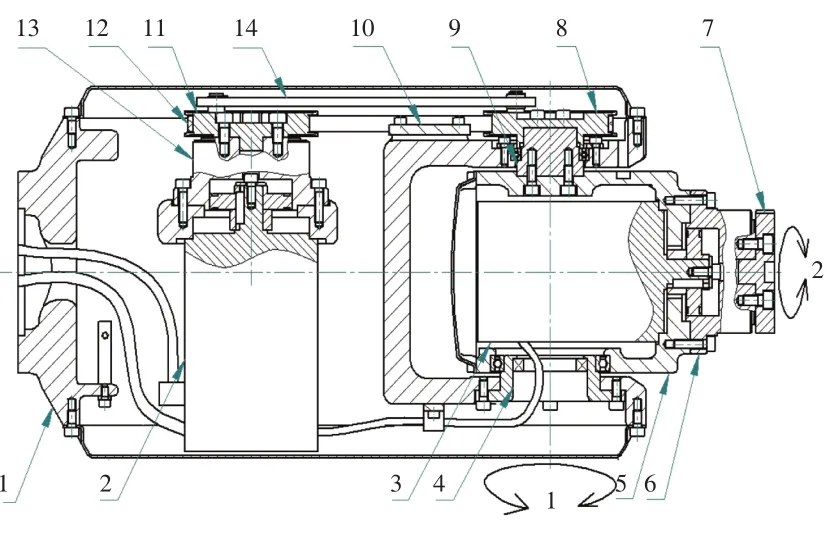
图6 简单实用的叉型手腕结构
1.3 中空叉型手腕结构
叉型手腕还包括一种中空的传动结构,该结构允许外部线缆或气管从手腕中心位置穿过,以减少与外围工装等的干涉,提高机器人的活动范围。其传动原理见图7。
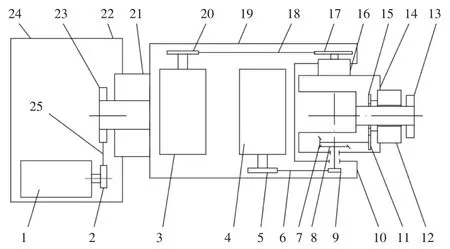
图7 中空叉型手腕结构传动简图(外啮合)
该中空叉型手腕结构相对于前两种手腕结构稍显复杂,增加了六轴中空结构。具体实施方案如图8a[4]、8b[4]与图9a[5]、9b[5],这两种传动方案的主要区别在于:前者六轴传动轴末端的直齿轮传动为外啮合,而后者为内啮合。
采用该种类似手腕结构的机器人品牌有安川电机(中国)有限公司(以下简称安川电机)、时代新纪元机器人、上海欢颜、成都卡诺普自动化控制技术有限公司等。
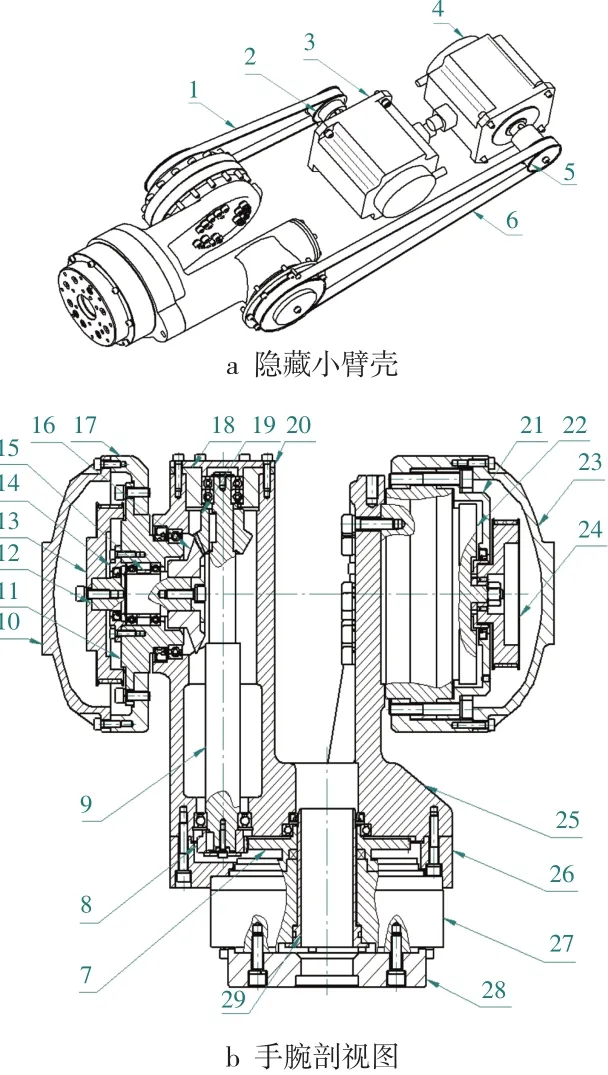
图8 一种外啮合中空叉型手腕结构
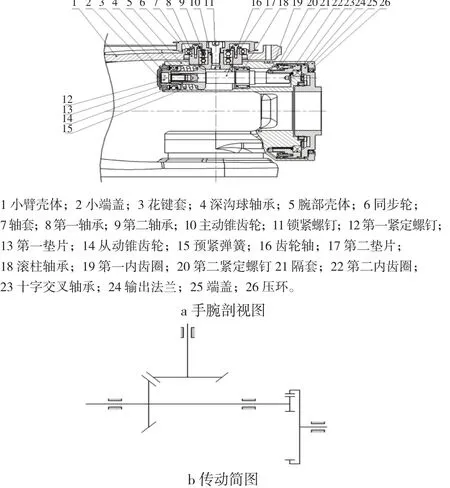
图9 一种内啮合中空叉型手腕结构
1.4 叉型手腕结构变形——单臂
该种结构的机器人手腕应用也较多,最典型的当属日本FANUC株式会社的M-10iA/20iA机器人系列,其传动原理如图10所示。国内机器人公司也有应用该类似结构的手腕,如图11[6]所示(图注略)。

图10 日本FANUC叉型手腕单臂结构简图
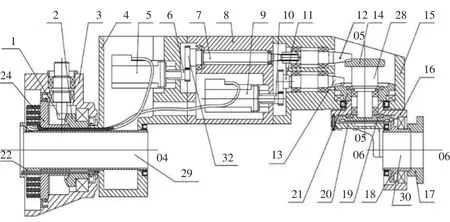
图11 国内机器人公司叉型手腕单臂结构
另外还有该手腕的变形结构,即将六轴电机直接放置在六轴位置处,一般为偏置结构,六轴电机与减速机直联,其传动原理如图12所示,图中“13”、“17”处的同步带传动也可以是齿轮传动方式。应用该手腕结构的机器人负载小到4kg,大到350kg,跨度非常大。该手腕五、六轴的电机一般布置在机器人手腕内或小臂中。
采用该类似手腕结构的机器人公司有川崎重工业株式会社、那智不二越株式会社等。
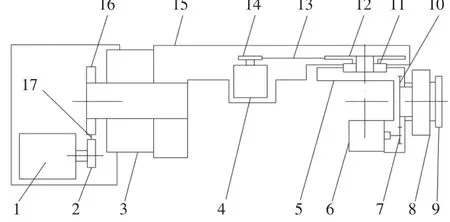
图12 叉型手腕单臂结构简图
1.5 叉型手腕结构——电机后置
该种手腕结构的传动原理如图13、图14所示,这两种传动方式的主要区别是五轴的旋转中心轴位置不同,相对而言,这种传动结构较复杂。图14的具体实施方案参考图15[7]。

图13 叉臂手腕结构传动简图一

图14 叉臂手腕结构传动简图二
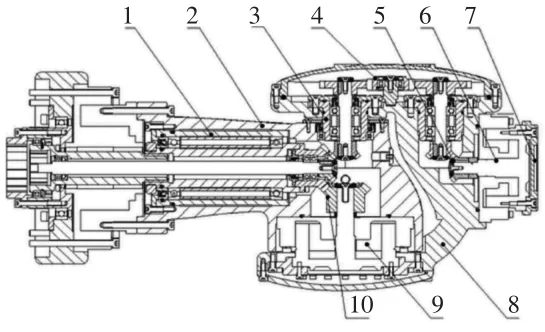
图15 一种叉臂手腕结构图
采用该种类似手腕结构的机器人品牌主要有安川电机、FANUC、ABB(中国)有限公司(以下简称ABB)、库卡机器人有限公司、上海新时达、南京埃斯顿、埃夫特智能装备股份有限公司、南京熊猫电子股份有限公司、广州数控设备有限公司等。
图16所示为ABB公司的叉型手腕传动原理简图,采用该手腕结构的机器人型号有ABB IRB52、IRB4600等。
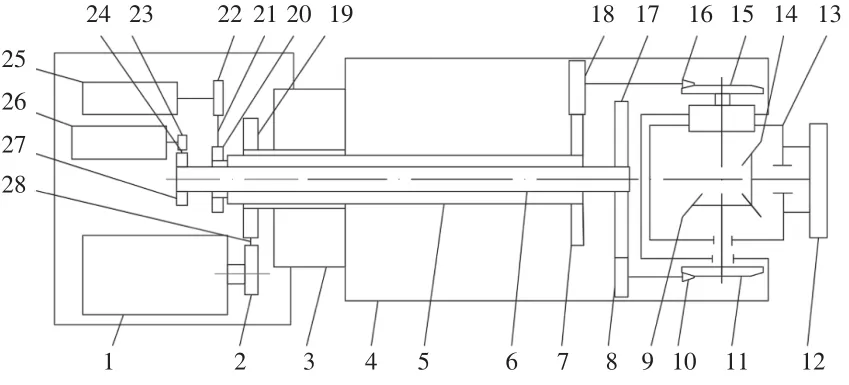
图16 ABB叉型手腕传动原理简图
2 结论
工业机器人叉型手腕结构包括很多类型,也有许多变形形式,在对其进行设计时,设计人员必须要考虑机器人的用途与使用环境,同时结合公司现有状况,设计出合理的机器人手腕结构。